一种基于物理神经网络的流体拓扑优化方法及系统
1.本发明涉及流体拓扑优化领域,尤其涉及一种基于物理神经网络的流体拓扑优化方法及系统。
背景技术:
2.拓扑优化是在一系列物理约束的条件下对给定区域内的材料分布进行优化以达到目标性能指标的一种结构优化方法。这个概念虽然兴起于结构力学设计问题,但在流体力学领域也得到了广泛的讨论和研究,人工智能技术为求解拓扑优化问题提供了新思路。然而,无论是利用大量模拟产生用于训练的拓扑优化图像数据从而通过图像生成和分类等技术来得到材料分布结果,还是通过神经网络生成材料分布函数的近似解再利用有限元方法得到物理场数据并判断是否需要继续迭代以获得达到目标性能的材料分布,都依赖于有限元方法,整个算法既有神经网络的部分又有有限元的部分,模型复杂且计算量大,需要计算大量偏微分方程伴随问题和敏感性问题,因此也难以得到均匀分布材料的设计空间中最佳的分布方案。
技术实现要素:
3.本发明的目的是提供一种基于物理神经网络的流体拓扑优化方法及系统,解决了流体管道材料密度分布不均的问题,并缩短了流体管道材料密度分布的计算时间,能够在均匀分布密度材料的设计空间中找到最佳的材料密度分布方案。
4.本发明所采用的第一技术方案是:一种基于物理神经网络的流体拓扑优化方法,包括以下步骤:
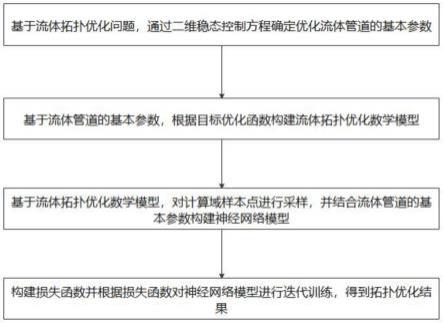
5.基于流体拓扑优化问题,通过二维稳态控制方程确定优化流体管道的基本参数;
6.基于流体管道的基本参数,根据目标优化函数构建流体拓扑优化数学模型;
7.基于流体拓扑优化数学模型,对计算域样本点进行采样,并结合流体管道的基本参数构建神经网络模型;
8.构建损失函数并根据损失函数对神经网络模型进行迭代训练,得到拓扑优化结果。
9.进一步,所述基于流体拓扑优化问题,通过二维稳态控制方程确定优化流体管道的基本参数这一步骤,其具体包括:
10.基于流体拓扑优化问题获取边界条件并对二维稳态控制方程进行求解,得到流体管道的基本参数;
11.所述流体管道的基本参数包括速度矢量、压强值和材料密度分布值。
12.进一步,所述二维稳态控制方程的本构形式如下所示:
[0013][0014]
[0015]
上式中,u表示速度矢量,f表示体积力,ρ
fluid
表示流体密度,σ表示柯西应力张量,p表示压强,μ表示流体粘度,i表示单位矩阵,t表示矩阵转置,表示速度的雅可比矩阵,表示速度的雅可比矩阵的转置。
[0016]
进一步,所述目标优化函数表示如下:
[0017][0018]
上式中,f
obj
表示目标优化值,ω表示计算域,α表示材料渗透能力。
[0019]
进一步,所述流体拓扑优化数学模型表示如下:
[0020][0021][0022]
x∈ω,u=ud(x),
[0023][0024]
上式中,表示计算域边界,ωd表示第一类边界,n表示外法边界,g(x)表示第二类边界上柯西应力的分布,ωn表示第二类边界。
[0025]
进一步,所述基于流体拓扑优化数学模型,对计算域样本点进行采样,并结合流体管道的基本参数构建神经网络模型这一步骤,其具体包括:
[0026]
对流体拓扑优化数学模型的计算域样本点进行采样,得到样本点的位置坐标;
[0027]
将样本点的位置坐标作为输入值,流体管道的基本参数作为输出值,构建神经网络模型;
[0028]
所述神经网络模型包括输入层、隐藏层和输出层。
[0029]
进一步,所述构建损失函数并根据损失函数对神经网络模型进行迭代训练,得到拓扑优化结果这一步骤,其具体包括:
[0030]
根据流体拓扑优化数学模型,构建损失函数;
[0031]
基于神经网络模型的隐藏层,选取对应的激活函数;
[0032]
根据激活函数对神经网络模型的输出层进行修正处理,得到修正值;
[0033]
基于损失函数,结合修正值对神经网络模型进行迭代训练,输出拓扑优化结果。
[0034]
进一步,所述修正值的表达式如下所示:
[0035][0036][0037]
上式中,表示速度分量的修正值,x,y表示样本点的二维位置坐标。
[0038]
进一步,所述损失函数的表达式如下所示:
[0039]
[0040]
上式中,ni(i=1,2,3)表示样本点个数,θ表示神经网络模型的参数,||f(xi,θ)||2表示物理场控制方差的残差,表示通过神经网络模型求得的第一类边界上的速度场近似值,ud(xi,θ)表示已知的第一类边界上的速度场实际值,表示通过神经网络求得的第二类边界上的应力场近似值,g(xi,θ)表示已知的第二类边界上的应力场实际值。
[0041]
本发明所采用的第二技术方案是:一种基于物理神经网络的流体拓扑优化系统,包括:
[0042]
确认模块,基于流体拓扑优化问题,通过二维稳态控制方程确定优化流体管道的基本参数;
[0043]
构建模块,基于流体管道的基本参数,根据目标优化函数构建流体拓扑优化数学模型;
[0044]
采样模块,基于流体拓扑优化数学模型,对计算域样本点进行采样,并结合流体管道的基本参数构建神经网络模型;
[0045]
训练模块,构建损失函数并根据损失函数对神经网络模型进行迭代训练,得到拓扑优化结果。
[0046]
本发明方法及系统的有益效果是:本发明通过神经网络拓扑优化方法解决流体管道材料密度分布的问题,通过神经网络模型的并行计算可以大大缩短材料密度分布的计算时间,此外,根据不同形式的优化目标函数,在均匀分布密度材料的设计空间中找到最佳的材料密度分布方法。
附图说明
[0047]
图1是本发明一种基于物理神经网络的流体拓扑优化方法的步骤流程图;
[0048]
图2是本发明一种基于物理神经网络的流体拓扑优化系统的结构框图;
[0049]
图3是本发明二维稳态拓扑优化问题的计算域及其边界条件的示意图;
[0050]
图4是本发明二维稳态拓扑优化问题的神经网络模型示意图;
具体实施方式
[0051]
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
[0052]
参照图1,本发明提供了一种基于物理神经网络的流体拓扑优化方法,该方法包括以下步骤:
[0053]
s1、基于流体拓扑优化问题,通过二维稳态控制方程确定优化流体管道的基本参数;
[0054]
s11、基于流体拓扑优化问题获取边界条件并对二维稳态控制方程进行求解,得到流体管道的基本参数;
[0055]
具体地,针对流体拓扑优化问题,在给定计算域和边界条件下,确定计算域内的最佳材料分布密度来设计一些流体装置或管道网络。
[0056]
s12、所述流体管道的基本参数包括速度矢量、压强值和材料密度分布值;
[0057]
具体地,参照图3,对于流体稳态拓扑优化问题,控制方程为稳态二维稳态控制方
程,为了提高模型的训练能力,选择二维稳态控制方程的本构形式如下所示:
[0058][0059][0060]
上式中,u表示速度矢量,f表示体积力,ρ
fluid
表示流体密度,σ表示柯西应力张量,p表示压强,μ表示流体粘度,i表示单位矩阵,t表示矩阵转置,表示速度的雅可比矩阵,表示速度的雅可比矩阵的转置;
[0061]
进一步计算体积力,体积力可表示为:
[0062]
f=-αu
[0063]
上式中,α表示材料渗透能力;
[0064]
进一步计算材料的密度,其计算公式如下所示:
[0065][0066]
上式中,α
min
,α
max
分别表示流体和固体的渗透能力,q表示转变系数,当密度ρ=1时表示流体,ρ=0时表示固体,通常情况下,α
min
选择为0,α
max
选择一个较大的数以便提高计算稳定性;
[0067]
通过边界条件对二维稳态控制方程进行求解计算,边界条件公式如下:
[0068]
u=ud(x),u=ud(x)
[0069][0070]
上式中,ud和g分别表示第一类边界上具体的速度矢量和第二类边界上柯西应力的分布,n表示边界的外法向量,和分别表示第一类边界条件和第二类边界,无滑移边界条件是一种特别的第一类边界条件,代表u=0,开放边界条件如管道出口则可用第二类边界条件g=0表示;
[0071]
s2、基于流体管道的基本参数,根据目标优化函数构建流体拓扑优化数学模型。
[0072]
具体地,所述目标优化函数表示如下:
[0073][0074]
上式中,f
obj
表示目标优化值,ω表示计算域,α表示材料渗透能力;
[0075]
通过目标优化函数和物理约束条件构建流体拓扑优化数学模型,所述流体拓扑优化数学模型表示如下:
[0076][0077][0078]
x∈ω,u=ud(x),
[0079][0080]
上式中,表示计算域边界,ωd表示第一类边界,n表示外法边界,g(x)表示第二类边界上柯西应力的分布,ωn表示第二类边界。
[0081]
s3、基于流体拓扑优化数学模型,对计算域样本点进行采样,并结合流体管道的基本参数构建神经网络模型;
[0082]
s31、对流体拓扑优化数学模型的计算域样本点进行采样,得到样本点的位置坐标;
[0083]
s32、将样本点的位置坐标作为输入值,流体管道的基本参数作为输出值,构建神经网络模型;
[0084]
s33、所述神经网络模型包括输入层、隐藏层和输出层。
[0085]
具体地,参照图4,神经网络的输入层为计算域内点的位置坐标:(x,y,z)。特别地,对于二维稳态问题,输入层只有两个位置坐标x与y。神经网络的输出层为速度分量,压强和材料密度:(u,v,w,p,ρ),其中材料密度即为待求的拓扑优化结果,隐藏层为全连接层,主要原因是全连接层足够满足我们处理问题的要求且模型更易训练;
[0086]
对于二维问题,输入层为二维位置坐标x和y,输出层变量为速度分量u和v,压强p,材料密度ρ,隐藏层选择5层含64个神经元的全连接层,激活函数选择双曲正切函数,根据边界条件,可以修正输出层变量,对速度分量的修正如下:
[0087][0088][0089]
上式中,表示速度分量的修正值,x,y表示样本点的二维位置坐标。
[0090]
s4、构建损失函数并根据损失函数对神经网络模型进行迭代训练,得到拓扑优化结果;
[0091]
s41、根据流体拓扑优化数学模型,构建损失函数;
[0092]
具体地,为了满足用自动微分处理偏微分方程,激活函数选择双曲正切函数,根据流体拓扑优化数学模型,神经网络模型的损失函数如下:
[0093][0094]
上式中,ni(i=1,2,3)表示样本点个数,θ表示神经网络模型的参数,||f(xi,θ)||2表示物理场控制方差的残差,表示通过神经网络模型求得的第一类边界上的速度场近似值,ud(xi,θ)表示已知的第一类边界上的速度场实际值,表示通过神经网络求得的第二类边界上的应力场近似值,g(xi,θ)表示已知的第二类边界上的应力场实际值。
[0095]
损失函数的后两项能反映求得的物理场近似解与已知的第一类边界条件和第二类边界条件的差距,差距越小则代表神经网络求得的近似解越能满足第一类边界条件和第二类边界条件;通过修正神经网络输出层的变量,可以使神经网络的近似解严格满足第一类边界条件。同时,可以减少对边界上数据地依赖,减少损失函数的项数。利用近似距离函数f
adf
边界上为0计算域内为正的特性:
[0096][0097]
上式中,θ表示原始神经网络的输出层变量,为修正后的变量。
[0098]
s42、基于神经网络模型的隐藏层,选取对应的激活函数;
[0099]
具体地,由于自动微分算法可导,选取双曲正切函数为激活函数,其表达式如下所示:
[0100][0101]
上式中,tanh表示双曲正切函数,exp表示指数函数。
[0102]
s43、根据激活函数对神经网络模型的输出层进行修正处理,得到修正值;
[0103]
具体地,因为材料密度的取值介于1与0之间,因此我们需要通过对神经网络输出层的材料密度进行修正,修正公式如下:
[0104][0105]
训练神经网络需要的样本点包括计算域内样本点和边界条件样本点。其中计算域内属于无监督学习部分,不需要通过数值方法求解用于训练,边界条件部分属于监督学习,可用已知条件生成训练用样本点。通过上述介绍的修正方法将第一类边界条件并入输出层则无需边界样本点。这样神经网络模型损失函数可精简为:
[0106][0107]
样本点的采样可选择均匀采样或随机采样,可根据计算域几何形状或不同子计算域物理场复杂程度采样;对于拓扑优化问题,将目标函数与物理约束条件并入损失函数,把对于目标函数的约束优化问题转化为非约束优化问题:
[0108]
min(f
obj
+αf
con
+βloss
pde
)
[0109]
上式中,β表示权重,loss
pde
表示物理神经网络损失函数。
[0110]
损失函数不光包含控制方程部分,还包含待求问题的目标函数部分和物理约束条件部分:
[0111]
loss=λ1·fobj
+λ2·
loss
pde
+λ3·fcon
[0112]
上式中,λi(i=1,2,3)表示权重,f
obj
,f
con
,loss
pde
分别表示目标函数项,物理约束项和物理神经网络损失函数。
[0113]
一般而言,物理约束条件为容积约束,即流体占计算域容积不超过某个阈值γ:∫ω
ρdω
≤γ。事实上,当流体容积越接近阈值γ,目标函数越小,为了满足减小目标函数的同时满足不等式约束,物理约束项可写成:
[0114][0115]
上式中,ρi表示用于训练的单个数据点处密度函数,γ表示容积约束阈值,n表示用于训练的数据点个数。
[0116]
s44、基于损失函数,结合修正值对神经网络模型进行迭代训练,输出拓扑优化结果。
[0117]
具体地,通过优化器adam和l-bfgs对损失函数进行优化,适当调整超参数如权重,学习率,迭代次数,当模型收敛时即可得到材料密度分布。关于约束项的权重λi(i=1,2,
3),如果过小则得到的解可能满足不了流体控制方程或物理约束如容积约束,如果过大,虽然从理论上来说能使流体控制方程或物理约束得到满足,但增大了训练难度降低了收敛速度。实际训练时可根据具体问题选择合适的调整权重的方法,比如按照损失函数各部分数量级选择固定权重,或者自适应方法:
[0118][0119]
上式中,lossi表示损失函数分量,loss表示总的损失函数,表示损失函数分量对应的权重,n表示损失函数分量个数。
[0120]
或者选择在初始固定权重的基础上逐步增大权重的方法:
[0121]
iteration=0:λ=λ0[0122]
iteration=k:λk=ξ
·
λ
k-1
[0123]
上式中,ξ表示增量因子,k表示第k次迭代,λk表示第k次迭代权重值;
[0124]
通过上述方法,能有效的控制权重的变化,加速模型收敛的同时更好地满足流体控制方程或物理约束。
[0125]
参照图2,一种基于物理神经网络的流体拓扑优化系统,像包括:
[0126]
确认模块,基于流体拓扑优化问题,通过二维稳态控制方程确定优化流体管道的基本参数;
[0127]
构建模块,基于流体管道的基本参数,根据目标优化函数构建流体拓扑优化数学模型;
[0128]
采样模块,基于流体拓扑优化数学模型,对计算域样本点进行采样,并结合流体管道的基本参数构建神经网络模型;
[0129]
训练模块,构建损失函数并根据损失函数对神经网络模型进行迭代训练,得到拓扑优化结果。
[0130]
上述方法实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述方法实施例相同,并且达到的有益效果与上述方法实施例所达到的有益效果也相同。
[0131]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1