一种基于滑动窗口与CHM的单木计数方法
一种基于滑动窗口与chm的单木计数方法
技术领域
1.本发明涉及森林单木检测技术领域,具体地说是一种基于滑动窗口与chm的单木计数方法。
背景技术:
2.森林是陆地生态系统的主体,对维持陆地生态系统平衡、维护气候调节变化、涵养水源、保持水土等生态效益方面具有重要作用,有效了解森林生长变化信息对森林资源的保护和管理以及生态环境的研究具有重要意义。单木检测是对森林中单木株数、树冠等进行信息进行获取,是森林资源管理、生态保护和恢复的关键,可为生物量及碳储量估算方面提供基础数据支撑。因此确定森林的单木株数尤为重要。
3.传统的树木检测主要依靠森林资源监测技术人员的现场调查来获取相关信息,具有费时费力、时效性低且成本高、难以大规模测量等缺陷。相较传统的人工调查手段,利用无人机遥感检测技术具有高时空分辨率、高机动性、低成本等优势,为森林资源的管理、保护与恢复提供便利。
4.现有技术的树木检测由于遥感影像的空间分辨率有限,基于深度学习与影像光谱信息的树冠覆盖区域的精准分割,对成片矮小稠密树木无法识别,提取分割精度较低,漏检率较高。而激光雷达(lidar)技术具有精度高,分辨力、抗干扰能力和冠层穿透力强等优点,可形成冠层高程模型(chm),在矮小稠密林区基于林木自身特征利用滑动窗口提取局部最大值可有效定位单木位置,计算单木株数,提高单木识别的精度。
技术实现要素:
5.本发明的目的是针对现有技术的不足提供了一种基于滑动窗口与chm的单木计数方法,采用嵌套滑动窗口对冠层高程影像进行依次滑动的单木检测方法,充分利用了单木自身高度从内向外逐渐递减的特性与嵌套滑动窗口边长、滑动步长,通过对整张冠层高程影像进行依次滑动,确定了单木位置,计算了单木株数,使得单木提取的精度大大提高,进一步降低漏检率,方法简便、省时省力、经济、高效,对森林资源的保护和管理以及生态环境的研究具有重要意义。
6.实现本发明目的的具体技术方案是:一种基于滑动窗口与chm的单木计数方法,其特点是该方法基于冠层高程模型(chm)与单木高度整体上呈现出从中间向外递减的特性,利用嵌套滑动窗口判断是否存在单木,并获取其冠层高程值,提取单木预选点,基于单木的树冠范围,确定单木搜索半径,最终获取单木的位置,并在此基础上计算单木株数,具体步骤如下:
7.步骤1:图像预处理
8.对冠层高程模型(chm)影像,进行局部直方图自适应均衡化,即将chm影像分割为边长为d像素的图像,并对每一块图像进行直方图均衡化,使影像的局部细节得到充分的对比度增强。
9.步骤2:单木位置预选点选定
10.2-1:基于单木树冠面积与影像空间分辨率,确定滑动窗口的边长为d像素;
11.2-2:利用嵌套的方形滑动窗口,以stepsize像素为步长,对冠层高程模型(chm)进行滑动;
12.2-3:计算嵌套的各滑动窗口的像素平均值,若滑动窗口的像素平均值从中心向外依次递减,表明该窗口内存在单木;
13.2-4:确定该滑动窗口内chm的最大值max,并确定该最大值的像素位置(x,y);
14.2-5:依次滑动图像中所有像素,确定图像中单木位置预选点points。
15.步骤3:单木位置确定
16.对步骤2中形成的单木位置预选点points,确定某预选点为圆心c,以r为搜索半径,提取位于圆内的预选点,并获取其像素值,选择最大像素值作为单木位置;依次使points中各点为圆心,确定最终单木位置。
17.步骤4:单木计数
18.对步骤3中确定的单木位置,累加计算chm影像中单木株数。
19.所述方形滑动窗口的边长d大于4,小于等于最大树冠直径,需整除4。
20.所述嵌套的方形滑动窗口由内到外分别为w1、w2、w3、w4,且以s像素为步长,需大于等于1,小于等于w1的边长。
21.所述若滑动窗口的像素平均值m
wi
从中心向外依次递减,表明该窗口内存在单木,即满足条件m
w1
》m
w2
或m
w1
》m
w2
》m
w3
或m
w1
》m
w2
》m
w3
》m
w4
该滑动窗口内均存在单木。
22.所述搜索半径r小于滑动窗口边长d,且大于滑动步长s。
23.本发明与现有技术相比具有方法简便,单木提取精度高,漏检率低,省时省力、经济、高效,对森林资源的保护和管理以及生态环境的研究具有重要意义。
附图说明
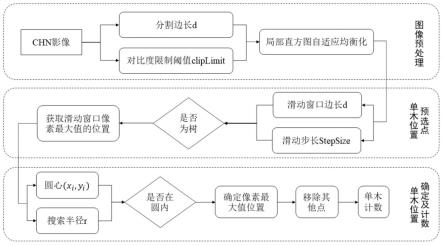
24.图1为本发明的流程图;
25.图2嵌套滑动窗口示例图;
26.图3为实施例1的chm影像识别示例图;
27.图4为实施例2的chm影像识别示例图;
28.图5为实施例3的chm影像识别示例图;
29.图6为实施例4的chm影像识别示例图;
30.图7为实施例5的chm影像识别示例图。
具体实施方式
31.参阅图1,本发明包括以下具体步骤:
32.步骤1:图像预处理
33.对冠层高程模型(chm)影像,进行局部直方图自适应均衡化,即将chm影像分割为边长为d像素的图像,设置对比度限制阈值cliplimit,对每一块图像进行直方图均衡化,使影像的局部细节得到充分的对比度增强,
34.步骤2:单木位置预选点选定
35.基于单木树冠面积与影像空间分辨率,确定滑动窗口的边长为d像素;利用嵌套的方形滑动窗口,以stepsize像素为步长,对冠层高程模型(chm)进行滑动;计算嵌套的各滑动窗口的像素平均值,若滑动窗口的像素平均值从中心向外依次递减,表明该窗口内存在单木;确定该滑动窗口内chm的最大值max,并确定该最大值的像素位置(x,y);依次滑动图像中所有像素,确定图像中单木位置预选点points。
36.步骤3:单木位置确定
37.对步骤2中形成的单木位置预选点points,确定某预选点为圆心c,以r为搜索半径,提取位于圆内的预选点,并获取其像素值,选择最大像素值作为单木位置;依次使points中各点为圆心,确定最终单木位置。
38.步骤4:单木计数
39.对步骤3中确定的单木位置,累加计算chm影像中单木株数。
40.所述步骤2中方形滑动窗口的边长d,大于4,小于等于最大树冠直径,需整除4。
41.参阅图2,所述步骤2中嵌套的方形滑动窗口,由内到外分别为w1、w2、w3、w4,以s像素为步长,需大于等于1,小于等于w1的边长。
42.所述步骤2中若滑动窗口的像素平均值m
wi
从中心向外依次递减,表明该窗口内存在单木,即满足条件m
w1
》m
w2
或m
w1
》m
w2
》m
w3
或m
w1
》m
w2
》m
w3
》m
w4
该滑动窗口内均存在单木。
43.所述步骤3中搜索半径r,小于滑动窗口边长d,大于滑动步长s。
44.以下结合附图及具体实施对本发明作进一步详细描述。
45.实施例1
46.参阅图3,本实施例具体过程包括三个步骤:
47.步骤1:冠层高程模型(chm)影像的自适应均衡化
48.参阅图3a,为提高图像的局部对比度,将冠层高程模型(chm)影像(图3a)进行局部直方图自适应均衡化。设置分块边长为16,对比度限制值为40,将图像划分为不重叠的小块,在每一块进行直方图均衡化,使影像的局部细节得到充分的对比度增强,获得chm影像局部直方图自适应均衡图(图3c)。
49.步骤2:单木位置预选点的选定
50.单木位置预选点确定所执行算法的伪代码详见下述表1:
51.表1单木位置预选点的算法伪代码
[0052][0053]
参阅图2,嵌套滑动窗口的边长从内到外依次为4,8,12,16,滑动窗口依次为w1,w2,w3,w4,窗口滑动步长stepsize为4。
[0054]
参阅图3c,使嵌套滑动窗口整体依次从冠层高程模型chm影像(图3a)中遍历,并计算各窗口中像素的平均值m
wi
。若各滑动窗口的平均值满足条件m
w1
》m
w2
或m
w1
》m
w2
》m
w3
或m
w1
》m
w2
》m
w3
》m
w4
,说明该滑动窗口内具有单木位置预选点。在滑动窗口w4中获取最大像素值的点位(x,y)作为单木预选点位置。最终获取影像中所有单木预选点位points,如图3d结果中所示的绿色点。
[0055]
步骤3:单木位置的确定
[0056]
由于从步骤2中获取的单木预选点位points,存在多个相同或不同点位重复表示某颗单木,需去除重复数据,提高定位精度与单木株树计算精度。单木位置确定所执行算法的伪代码详见下述表2:
[0057]
表2单木位置确定的算法伪代码
[0058][0059]
首先去除相同点位重复表示某颗单木,得数据de_points然后设置搜索半径为7,设置de_points中第一个点坐标(x1,y1)为圆心c,依次计算de_points中各点距圆心的距离,若两点间距离小于7,即该点位于以(x1,y1)为圆心,7为半径的圆内,位于圆内的点表示不同点重复表示某颗单木,比较圆内位像素值,获取最大像素值的点位,从de_points中去除圆内其他点。
[0060]
参阅图3d,依次设置de_points中其他点为圆心,去除重复点,最终获得确定的单木位置,如图3d结果中所示的红色点,计算单木总数,获得单木检测预测值。
[0061]
参阅图3b,从rgb影像中人眼识别单木,确定该影像中所示区域的单木总数真值,计算单木漏判与误判值。
[0062]
实施例2
[0063]
参阅图4,具体步骤同实施例1。
[0064]
实施例3
[0065]
参阅图5,具体步骤同实施例1。
[0066]
实施例4
[0067]
参阅图6,具体步骤同实施例1。
[0068]
实施例5
[0069]
参阅图7,具体步骤同实施例1。
[0070]
上述各实施例的单木检测结果值汇总如下表3所示:
[0071]
表3单木检测结果汇总表
[0072] 真值预测值漏判误判示例1484821示例2808044示例3363914示例4272801示例5333531
[0073]
本发明利用激光雷达(lidar)技术具有精度高,分辨力、抗干扰能力和冠层穿透力强等优点,可形成冠层高程模型(chm),在矮小稠密林区基于林木自身特征利用滑动窗口提取局部最大值可有效定位单木位置,计算单木株数,提高单木识别的精度。
[0074]
以上仅为本发明的一种具体实施方式,并非用以限制本发明,对于不脱离本发明构思前提下做出的变形与改进,都属于本发明的权利要求保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1