一种风电机组塔基门锁系统的制作方法
1.本发明涉及风电机组技术领域,尤其涉及一种风电机组塔基门锁系统。
背景技术:
2.风力发电电源由风力发电机组、支撑发电机组的塔架、蓄电池充电控制器、逆变器、卸荷器、并网控制器、蓄电池组等组成;风力发电机组包括风轮、发电机;风轮中含叶片、轮毂、加固件等组成;它有叶片受风力旋转发电、发电机机头转动等功能。它有叶片受风力旋转发电、发电机机头转动等功能。风速选择:低风速风力发电机能有效提升风力发电机在低风速区域的风能利用,在年平均风速小于3.5m/s,且无台风的地区,推荐选用低风速产品。由于风电属于新能源范畴,无论是成本还是技术同传统的火电、水电相比还有较大的差距,因而风电的快速发展需要国家政策的大力扶持。纵观风电发展迅速的国家如德国、西班牙、印度,无一例外地都给予风电产业巨大的政策优惠。中国对风电的政策支持由来已久,力度也越来越大,政策支持的对象也由过去的注重发电转向了注重扶持国内风电设备制造。国家的政策支持将是风电设备制造业迅猛发展的根本保障,随着中国国产风机设备的自主制造能力不断加强,国家的政策支持力度也将越来越大,风电设备制造业面临难得的历史发展机遇。
3.现有五防操作系统可以说已经很成熟,但存在五防钥匙锁必须拿到现场去开门,并且离开钥匙装置时,五防锁很快就没电了,必须插充电宝来实现很长时间的操作,另外虽然是五防先进管理,但还是人员进入现场去开锁,并不智能,为此我们提出一种风电机组塔基门锁系统来解决上述问题。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在五防钥匙锁必须拿到现场去开门,并且离开钥匙装置时,五防锁很快就没电了,必须插充电宝来实现很长时间的操作,另外虽然是五防先进管理,但还是人员进入现场去开锁,并不智能的问题,而提出的一种风电机组塔基门锁系统。
5.为了实现上述目的,本发明采用了如下技术方案:
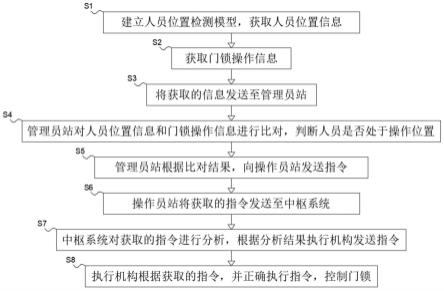
6.一种风电机组塔基门锁控制方法,包括如下步骤:
7.建立人员位置检测模型,获取人员位置信息;
8.获取门锁操作信息;
9.将获取的信息发送至管理员站;
10.管理员站对人员位置信息和门锁操作信息进行比对,判断人员是否处于操作位置;
11.管理员站根据比对结果,向操作员站发送指令;
12.操作员站将获取的指令发送至中枢系统;
13.中枢系统对获取的指令进行分析,根据分析结果执行机构发送指令;
14.执行机构根据获取的指令,并正确执行指令,控制门锁。
15.优选地,建立人员位置检测模型,获取人员位置信息,人员位置检测模型运行步骤如下:
16.进行hog特征提取;
17.训练检测模型。
18.优选地,进行hog特征提取,提取步骤如下:
19.彩色图像灰度化;
20.采用gamma校正归一化颜色空间;
21.像素点梯度计算;
22.给每个单元创建梯度方向直方图;
23.将单元组合成更大的块并对梯度方向直方图进行归一化操作;
24.收集hog特征。
25.优选地,训练检测模型,训练步骤如下:
26.准备彩色图像的正样本和负样本;
27.提取所有正样本的hog特征,并赋予正样本标签;
28.提取所有负样本的hog特征,并赋予负样本标签;
29.将正负样本的hog特征和标签输入到线性svm中进行训练;
30.得到hog特征检测模型。
31.一种风电机组塔基门锁系统,包括:
32.位置信息获取模块:用于建立人员位置检测模型,获取人员位置信息;
33.操作信息获取模块:用于获取门锁操作信息;
34.信息发送模块:用于将获取的信息发送至管理员站;
35.信息比对模块:用于管理员站对人员位置信息和门锁操作信息进行比对,判断人员是否处于操作位置;
36.指令发送模块:用于管理员站根据比对结果,向操作员站发送指令;
37.指令输送模块:用于操作员站将获取的指令发送至中枢系统;
38.指令分析模块:用于中枢系统对获取的指令进行分析,根据分析结果执行机构发送指令;
39.指令执行模块:用于执行机构根据获取的指令,并正确执行指令,控制门锁。
40.优选地,所述位置信息获取模块包括:
41.特征提取单元:用于进行hog特征提取;
42.模型训练单元:用于训练检测模型。
43.优选地,所述特征提取单元包括:
44.图像灰度化子单元:用于彩色图像灰度化;
45.归一化子单元:用于采用gamma校正归一化颜色空间;
46.梯度计算子单元:用于像素点梯度计算;
47.直方图创建子单元:用于给每个单元创建梯度方向直方图;
48.组合归一化子单元:用于将单元组合成更大的块并对梯度方向直方图进行归一化操作;
49.特征收集子单元:用于收集hog特征。
50.优选地,所述模型训练单元包括:
51.样本准备子单元:用于准备彩色图像的正样本和负样本;
52.正样本特征提取子单元:用于提取所有正样本的hog特征,并赋予正样本标签;
53.负样本特征提取子单元:用于提取所有负样本的hog特征,并赋予负样本标签;
54.样本训练子单元:用于将正负样本的hog特征和标签输入到线性svm中进行训练;
55.检测模型获得子单元:用于得到hog特征检测模型。
56.相比现有技术,本发明的有益效果为:
57.本发明可以很好的管理现场人员误入间隔,管理现场门锁在未开票审批的情况下人员将门锁打开,另外也可以提高人员工作效率,避免忘记带钥匙进不去风电机组二回再回去拿等情况,另外电子票实施后,可以和电子工作票一起实现智能化场站,可实现在远方一键开启塔基门,并由值班人员进行远方挂锁,有效的方便人员管理,也方便工作人员良好的工作。
附图说明
58.图1为本发明提出的一种风电机组塔基门锁系统的整体流程示意图;
59.图2为本发明提出的一种风电机组塔基门锁系统的人员位置检测模型运行步骤流程示意图;
60.图3为本发明提出的一种风电机组塔基门锁系统的特征提取流程示意图;
61.图4为本发明提出的一种风电机组塔基门锁系统的检测模型训练步骤示意图。
具体实施方式
62.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
63.参照图1-4,一种风电机组塔基门锁控制方法,包括如下步骤:
64.s1:建立人员位置检测模型,获取人员位置信息,人员位置检测模型运行步骤如下:
65.s101:进行hog特征提取,提取步骤如下:
66.s10101:彩色图像灰度化;
67.将彩色图像中每个像素点的rgb分量转换为灰度值,其转化公式为:
68.gray=0.3*r+0.59*g+0.11*b
69.式中:r、g、b分别代表彩色图像中每个像素点的红色、绿色以及蓝色分量,gray代表灰度图像中每个像素点的灰度值;
70.s10102:采用gamma校正归一化颜色空间;
71.为了降低光照变化的影响,首先必需对整幅图像开展归一化操作;就纹理特征而言,局部表面曝光占比偏大,因此该过程可以有效地减少图像的局部阴影和光照变化;gamma压缩公式为:
72.f(x,y)=f(x,y)
γ
73.式中f(x,y)代表灰度图像中像素点(x,y)处的灰度值,γ代表压缩系数,通常可以
取γ=0.5;
74.s10103:像素点梯度计算;
75.图像中像素点(x,y)的梯度为:
76.g
x
(x,y)=f(x+1,y)-f(x-1,y)
77.gy(x,y)=f(x,y+1)-f(x,y-1)
78.式中:g
x
(x,y),gy(x,y)即对应于(x,y)这一像素点在水平、竖直方向的相应梯度值,所以,其梯度幅值g(x,y)和方向分别为:
[0079][0080][0081]
常用求解水平梯度和竖直梯度的方法是:首先以[-1,0,1]这一梯度算子,来卷积运算原始图像,此时水平方向向右为正的梯度分量即可获得;此后,再结合[1,0,-1]
t
完成如上运算,此时竖直方向向上为正的梯度分量也将因此而获得;最后使用上述公式,即可计算出图像中该像素点的梯度大小和梯度方向;
[0082]
s10104:给每个单元创建梯度方向直方图;
[0083]
把图像分成许多个单元(称作cell),假设一个cell为8
×
8个像素,且相邻的cell之间互不重叠;在每一个cell中,计算梯度方向直方图,并把所有的梯度方向分成9个区域(称作bin),即有9维特征向量,把它作为梯度方向直方图的水平坐标轴,把在该角度范围内的梯度值的累加和作为梯度方向直方图的垂直坐标轴;
[0084]
s10105:将单元组合成更大的块并对梯度方向直方图进行归一化操作;
[0085]
因背景、光照条件变化较为复杂,使梯度值变化范围相对偏大。因此,要提升检测率就必需使用效果优异的特征标准化方法;标准化有多种方法,一般情况下是将多个小的cell组合成一个大的块(称作block),假设一个block为2
×
2个cell,并且每一个block都被单独的归一化处理,不同块不会互相影响。而在对hog特征进行提取时,block可能会有重叠出现,可结合邻近block对此部分边缘梯度信息进行表达。所以,从一定程度来看,此种特征可对因边缘位移而导致的形变进行抑制。
[0086]
假定,对于有64
×
128个像素的图像而言,一个cell由8x8个像素组成,一个block由2
×
2个cell组成,由于一个cell有9个特征,所以一个block共有36个特征,图像的水平和竖直方向所对应的扫描窗口分别为7个和15个,所以共有特征7x15x36=3780个;
[0087]
s10106:收集hog特征;
[0088]
待检测窗口中的所有重叠块被用来收集hog特征,所有的hog特征即可组合成用于最终分类的特征向量;
[0089]
s102:训练检测模型,训练步骤如下:
[0090]
s10201:准备彩色图像的正样本和负样本;
[0091]
s10202:提取所有正样本的hog特征,并赋予正样本标签;
[0092]
s10203:提取所有负样本的hog特征,并赋予负样本标签;
[0093]
s10204:将正负样本的hog特征和标签输入到线性svm中进行训练,线性svm训练流程如下:
[0094]
设线性可分的样本集{xi,yi},i=1,2,
…
,n,其中xi∈rd,类标签yi∈{-1,1},则d维空间中的线性判别函数:
[0095]
g(x)=w*x+b
[0096]
式中:w是超平面的法向量。归一化全部已获得的判别函数,由此正确的通过分类器,对样本进行归类:
[0097][0098]
因而有yi(w*xi+b)≥1
[0099]
得出边带为
[0100]
因此可以转化为一个优化问题:minimize||w||,subject to yi(w*xi+b)≥1;
[0101]
最小化||w||,可以用最小化||w||2/2代替,因此,可以引入非负拉格朗日乘数αi,将问题变形为:
[0102][0103]
该表达式即寻找一个鞍点,这个问题可以用标准二次规划技术得以解决;
[0104]
s10205:得到hog特征检测模型;
[0105]
s2:获取门锁操作信息;
[0106]
s3:将获取的信息发送至管理员站;
[0107]
s4:管理员站对人员位置信息和门锁操作信息进行比对,判断人员是否处于操作位置;
[0108]
s5:管理员站根据比对结果,向操作员站发送指令;
[0109]
比对结果显示人员未处于门锁位置时,向操作员站发送人员位置改变指令;
[0110]
比对结果显示人员处于门锁位置时,向操作员站发送可操作门锁指令;
[0111]
s6:操作员站将获取的指令发送至中枢系统;
[0112]
s7:中枢系统对获取的指令进行分析,根据分析结果执行机构发送指令;
[0113]
分析结果为门锁打开时,发送门锁打开指令;
[0114]
分析结果为门锁关闭时,发送门锁关闭指令;
[0115]
s8:执行机构根据获取的指令,并正确执行指令,控制门锁。
[0116]
一种风电机组塔基门锁系统,包括:
[0117]
位置信息获取模块:用于建立人员位置检测模型,获取人员位置信息;
[0118]
操作信息获取模块:用于获取门锁操作信息;
[0119]
信息发送模块:用于将获取的信息发送至管理员站;
[0120]
信息比对模块:用于管理员站对人员位置信息和门锁操作信息进行比对,判断人员是否处于操作位置;
[0121]
指令发送模块:用于管理员站根据比对结果,向操作员站发送指令;
[0122]
指令输送模块:用于操作员站将获取的指令发送至中枢系统;
[0123]
指令分析模块:用于中枢系统对获取的指令进行分析,根据分析结果执行机构发送指令;
[0124]
指令执行模块:用于执行机构根据获取的指令,并正确执行指令,控制门锁。
[0125]
其中,位置信息获取模块包括:
[0126]
特征提取单元:用于进行hog特征提取;
[0127]
模型训练单元:用于训练检测模型。
[0128]
其中,特征提取单元包括:
[0129]
图像灰度化子单元:用于彩色图像灰度化;
[0130]
将彩色图像中每个像素点的rgb分量转换为灰度值,其转化公式为:
[0131]
gray=0.3*r+0.59*g+0.11*b
[0132]
式中:r、g、b分别代表彩色图像中每个像素点的红色、绿色以及蓝色分量,gray代表灰度图像中每个像素点的灰度值;
[0133]
归一化子单元:用于采用gamma校正归一化颜色空间;
[0134]
为了降低光照变化的影响,首先必需对整幅图像开展归一化操作;就纹理特征而言,局部表面曝光占比偏大,因此该过程可以有效地减少图像的局部阴影和光照变化;gamma压缩公式为:
[0135]
f(x,y)=f(x,y)
γ
[0136]
式中f(x,y)代表灰度图像中像素点(x,y)处的灰度值,γ代表压缩系数,通常可以取γ=0.5;
[0137]
梯度计算子单元:用于像素点梯度计算;
[0138]
图像中像素点(x,y)的梯度为:
[0139]gx
(x,y)=f(x+1,y)-f(x-1,y)
[0140]gy
(x,y)=f(x,y+1)-f(x,y-1)
[0141]
式中:g
x
(x,y),gy(x,y)即对应于(x,y)这一像素点在水平、竖直方向的相应梯度值,所以,其梯度幅值g(x,y)和方向分别为:
[0142][0143][0144]
常用求解水平梯度和竖直梯度的方法是:首先以[-1,0,1]这一梯度算子,来卷积运算原始图像,此时水平方向向右为正的梯度分量即可获得;此后,再结合[1,0,-1]
t
完成如上运算,此时竖直方向向上为正的梯度分量也将因此而获得;最后使用上述公式,即可计算出图像中该像素点的梯度大小和梯度方向;
[0145]
直方图创建子单元:用于给每个单元创建梯度方向直方图;
[0146]
把图像分成许多个单元(称作cell),假设一个cell为8
×
8个像素,且相邻的cell之间互不重叠;在每一个cell中,计算梯度方向直方图,并把所有的梯度方向分成9个区域(称作bin),即有9维特征向量,把它作为梯度方向直方图的水平坐标轴,把在该角度范围内的梯度值的累加和作为梯度方向直方图的垂直坐标轴;
[0147]
组合归一化子单元:用于将单元组合成更大的块并对梯度方向直方图进行归一化
操作;
[0148]
因背景、光照条件变化较为复杂,使梯度值变化范围相对偏大。因此,要提升检测率就必需使用效果优异的特征标准化方法;标准化有多种方法,一般情况下是将多个小的cell组合成一个大的块(称作block),假设一个block为2
×
2个cell,并且每一个block都被单独的归一化处理,不同块不会互相影响。而在对hog特征进行提取时,block可能会有重叠出现,可结合邻近block对此部分边缘梯度信息进行表达。所以,从一定程度来看,此种特征可对因边缘位移而导致的形变进行抑制。
[0149]
假定,对于有64
×
128个像素的图像而言,一个cell由8x8个像素组成,一个block由2
×
2个cell组成,由于一个cell有9个特征,所以一个block共有36个特征,图像的水平和竖直方向所对应的扫描窗口分别为7个和15个,所以共有特征7x15x36=3780个;
[0150]
特征收集子单元:用于收集hog特征;
[0151]
待检测窗口中的所有重叠块被用来收集hog特征,所有的hog特征即可组合成用于最终分类的特征向量。
[0152]
其中,模型训练单元包括:
[0153]
样本准备子单元:用于准备彩色图像的正样本和负样本;
[0154]
正样本特征提取子单元:用于提取所有正样本的hog特征,并赋予正样本标签;
[0155]
负样本特征提取子单元:用于提取所有负样本的hog特征,并赋予负样本标签;
[0156]
样本训练子单元:用于将正负样本的hog特征和标签输入到线性svm中进行训练,线性svm训练流程如下:
[0157]
设线性可分的样本集{xi,yi},i=1,2,
…
,n,其中xi∈rd,类标签yi∈{-1,1},则d维空间中的线性判别函数:
[0158]
g(x)=w*x+b
[0159]
式中:w是超平面的法向量。归一化全部已获得的判别函数,由此正确的通过分类器,对样本进行归类:
[0160][0161]
因而有yi(w*xi+b)≥1
[0162]
得出边带为
[0163]
因此可以转化为一个优化问题:minimize||w||,subject to yi(w*xi+b)≥1;
[0164]
最小化||w||,可以用最小化||w||2/2代替,因此,可以引入非负拉格朗日乘数αi,将问题变形为:
[0165][0166]
该表达式即寻找一个鞍点,这个问题可以用标准二次规划技术得以解决;
[0167]
检测模型获得子单元:用于得到hog特征检测模型。
[0168]
一种智能计算机设备,包括存储器和处理器,所述存储器中存储有计算机可读指
令,所述处理器执行所述计算机可读指令时实现如所述的风电机组塔基门锁控制方法的步骤。
[0169]
一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机可读指令,所述计算机可读指令被处理器执行时实现如所述的风电机组塔基门锁控制方法的步骤。
[0170]
本发明中,首先对于控制室来说,必须要创建操作员站,编写程序让操作员站实现远程控制的功能,设立管理员站,给出管理员管理的权限,另外与现场各风电机组建立通讯,在现场塔基门设计执行机构,在塔基设计例如大脑一样的东西,即可以接收操作员站传来的信号,也可以将信号下达给操作机构,使操作机构可以正确的执行指令,另外也可以实现在操作员站电子挂锁后,现场实现闭锁,无法控制其开关。
[0171]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1