一种复杂场景图像中的小目标语义分割方法及系统与流程
1.本发明涉及图像处理技术领域,具体为一种复杂场景图像中的小目标语义分割方法及系统。
背景技术:
2.图像语义分割是计算机视觉三大任务之一,它的目标是对图像中的每个像素点做类别标记,得到一幅图像的语义分割图。从传统的图像分割角度来看,图像语义分割是在语义层面上将图像分割成多个区域,然后为每个区域分配合适的类别标签。随着高速计算设备gpu的发展,解决语义分割问题的主流框架已经被深度学习方法所取代。
3.现有图片识别过程中,存在小目标识别丢失的问题。进行图片时,通常将图片当作一个对象进行识别,对此识别所获得特征信息只有一个,故无法有效对图片中的其他目标进行精准识别。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种复杂场景图像中的小目标语义分割方法及系统,解决了现有图片识别中,小目标识别困难的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:一种复杂场景图像中的小目标语义分割方法,包括以下内容:
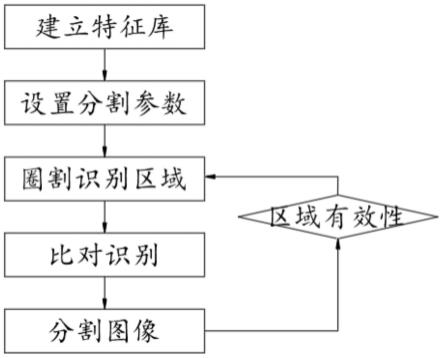
8.建立特征库:选取不同尺寸,且相同类型的场景的图片,基于深度学习算法对图片进行识别,存储特征信息;
9.设置分割参数:导入目标图片,并获取图片的尺像素寸(x,y),同时输入最小分割单元(x,y);
10.圈割识别区域:以整个图像的像素尺寸作为分割单元,并且以像素原点和分割单元原点重合为起点,若当前的分割单元x
当
≥x,则换行识别,若不满足,则进行x方向的移位继续圈割;
11.换行则在y方向上移位,并且在y方向上移位一次后,继续进行x方向的移位圈割,重复上述过程,直至x
当
≥x、y
当
≥y,进行分割单元尺寸的变换;
12.即通过减小当前分割单元(x
当
,y
当
)的尺寸,重复上述过程,直至x
当
<x,y
当
<y结束圈割;
13.比对识别:每次圈割后,对所圈割区域参照特征库进行图像识别,并获取轮廓信息;
14.分割图像:对获得轮廓向外移动一个像素获得新的轮廓边线,并将轮廓边线坐标映射至目标图片中,并对轮廓内的图像进行单独保存。
15.优选的,所述圈割识别区域中,每次圈割区域时,需要判断当前圈割区域和已经识
别物体的轮廓之间的重合度,若重合度大于设定的阈值,则舍弃当前圈割区域。
16.优选的,所述重合度采用当前圈割区域和已经识别物体的轮廓之间像素重合数量除以当前圈割区域内所有像素数量。
17.优选的,所述圈割识别区域中,x方向的移位的数值为x
当
/2-1,y方向的移位的数值为y
当
/2-1。
18.优选的,所述圈割识别区域中,分割单元尺寸变换方式则是(x
当-x/2+1,y
当-y/2+1)。
19.优选的,所述分割图像中,保存轮廓参数,并通过轮廓参数将保存的图片和原图片构建父子关系。
20.一种复杂场景图像中的小目标语义分割的系统,包括以上述中所撰写的程序和该程序运行的硬件环境。
21.(三)有益效果
22.本发明提供了一种复杂场景图像中的小目标语义分割方法及系统。具备以下有益效果:
23.1、本发明,将图片进行圈割,并且圈割的区域从大到小,对所圈割的图像进行识别,从而避免小目标的识别丢失,以及图片中的大目标也会显现。
24.2、本发明,在进行图片识别前,先进行当前区域有效性的判断,若当前区域无效,则不用进行圈割和图像识别,可大大节省计算资源和提高图片处理效率。
附图说明
25.图1为本发明的流程示意图。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.实施例:
28.如图1所示,本发明实施例提供一种复杂场景图像中的小目标语义分割方法,包括以下内容:
29.建立特征库:选取不同尺寸,且相同类型的场景的图片,不同尺寸的图片用于相同目标不同尺寸下特征统一,基于深度学习算法对图片进行识别,存储特征信息,在识别时,通常采用直接识别图像中明显的目标,而对比小尺寸的目标通常被忽略掉,并且传统中进行训练使用图片类型同一,不同尺寸的目标,在其特征信息上也有区别,无法识别出图片所有尺寸的目标;
30.设置分割参数:导入目标图片,并获取图片的尺像素寸(x,y),即以两个方向的像素构建平面坐标系,同时输入最小分割单元(x,y),最小分割单元为目标在该尺寸下,能够识别的区域大小,可以人为设置;
31.圈割识别区域:以整个图像的像素尺寸作为分割单元,并且以像素原点和分割单
元原点重合为起点,若当前的分割单元x
当
≥x,则换行识别,若不满足,则进行x方向的移位继续圈割;
32.换行则在y方向上移位,并且在y方向上移位一次后,继续进行x方向的移位圈割,重复上述过程,直至x
当
≥x、y
当
≥y,进行分割单元尺寸的变换;
33.即通过减小当前分割单元(x
当
,y
当
)的尺寸,重复上述过程,直至x
当
<x,y
当
<y结束圈割;
34.上述中,首先以整个图片的尺寸作为分割单元的起始大小,即先进行识别图片上的目标,接着,改变分割单元的大小,进行逐行逐列进行分割识别目标,当分割单元的尺寸小于设定的最小分割单元后结束,该方式不仅从大小,进行分割图片,并对所分割的图片进行单独识别,从而避免小目标识别的遗漏,提高识别的正确率。
35.比对识别:每次圈割后,对所圈割区域参照特征库进行图像识别,并获取轮廓信息,图像的识别和目标轮廓的获取均采用现有图像识别技术;
36.分割图像:对获得轮廓向外移动一个像素获得新的轮廓边线,即增大轮廓覆盖范围,并将轮廓边线坐标映射至目标图片中,即将轮廓的位置在目标图片中进行确定,并对轮廓内的图像进行单独保存,当时调用显示分割图像时,通过轮廓在目标图片进行亮高显示,标识所分割图像在目标图片的位置。
37.圈割识别区域中,每次圈割区域时,需要判断当前圈割区域和已经识别物体的轮廓之间的重合度,若重合度大于设定的阈值,则舍弃当前圈割区域,即当前圈割区域和已经识别的目标发生重合,根据重合的情况,判断当前位置圈割区域的有效性,若无效,则无需进行圈割和图像识别,进行下一步的圈割,该步骤可以大大节省计算资源,并大大提高图片处理的速度。
38.重合度采用当前圈割区域和已经识别物体的轮廓之间像素重合数量除以当前圈割区域内所有像素数量,即通过重合像素的占比,和所设的阈值进行比较,实现圈割区域有效性的判断。
39.圈割识别区域中,x方向的移位的数值为x
当
/2-1,y方向的移位的数值为y
当
/2-1,即以当前圈割尺寸为界限,进行逐行逐列移动圈割。
40.圈割识别区域中,分割单元尺寸变换方式则是(x
当-x/2+1,y
当-y/2+1),以最小分割单元作为分割单元的尺寸变化。
41.分割图像中,保存轮廓参数,并通过轮廓参数将保存的图片和原图片构建父子关系,即用于保存的图片和原图片之间联系。
42.上述中采用从区域到小区域进行分割,过程中对分割区域和目标重合的舍弃,再进行图像识别,相较于直接图片分割若干份最小分割区域,再依次及图像识别,需要大量的计算资源,以及对于大目标的识别存在丢失的可能。
43.一种复杂场景图像中的小目标语义分割的系统,包括以上述中所撰写的程序和该程序运行的硬件环境,硬件包括运算用的计算单元,计算单元由于cpu和gpu组成,以及存储设备等。
44.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1