一种基于图像灰度梯度的红外图像非均匀性校正方法与流程
1.本发明涉及红外图像校正领域,尤其涉及一种基于图像灰度梯度的红外图像非均匀性校正方法。
背景技术:
2.红外焦平面探测器是红外热成像系统的核心器件,在军事领域和民用视场有着广泛的应用,但在实际应用过程中红外热像仪的原始输出图像存在明显的非均匀性,其产生的原因主要有探测器自身的非均匀性、放大器噪声和背景辐射光子噪声。如何有效的降低红外热成像过程中图像的非均匀性,提升图像的质量是本领域技术人员需要解决的问题。目前非均匀性校正(non-uniformity correction,简称nuc)常用的一种方法是两点定标法,在红外热像仪出厂前进行一次两点标定。但是在使用过程中,随着环境的变化和探测器自身的变化,图像的非均匀性和标定的结果存在差异,因此需要在定期进行快门校正,以快门作为标准,频繁进行标定来进行非均匀性校正,但这会增加系统的功耗和成本。
技术实现要素:
3.为了解决上述问题,本发明提供的一种基于图像灰度梯度的红外图像非均匀性校正方法。该方法采集两帧图像,对两帧图像进行两点nuc校正减少较差的本底中的非均匀性残留影响后续算法,采用prewitt算子提取图像灰度梯度特征,查找特征图最亮点,并以最亮点为中心上下左右各扩展128个像素,获取256
×
256大小图像块,并对进行二值化操作,对进行二值化操作后前一帧和当前帧分别进行行列投影匹配,计算位移获取偏移量信息;根据偏移量信息,将两帧图像的重叠部分进行相减运算,计算更新本底需要补偿量,对本底进行更新,采用经过修正的本底,对当前帧进行nuc校正。这样可以有效消除固定噪声、高频噪声和低频噪声,提高非均匀性校正的效率和准确性,无需挡片,并节省运算资源。
4.本技术提供的一种基于图像灰度梯度的红外图像非均匀性校正方法,包括以下步骤:
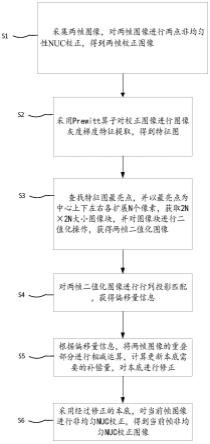
5.s1、采集两帧图像,对两帧图像进行两点非均匀性nuc校正,得到两帧校正图像;
6.s2、采用prewitt算子对校正图像进行图像灰度梯度特征提取,得到特征图;
7.s3、查找特征图最亮点,并以最亮点为中心上下左右各扩展n个像素,获取2n
×
2n大小图像块,并对图像块进行二值化操作,获得两帧二值化图像;
8.s4:对两帧二值化图像进行行列投影匹配,获得偏移量信息;
9.s5:根据偏移量信息,将两帧图像的重叠部分进行相减运算,计算更新本底需要的补偿量,对本底进行修正;
10.s6:采用经过修正的本底,对当前帧图像进行非均匀nuc校正,得到当前帧非均匀nuc校正图像。
11.进一步地,步骤s1中,对两帧图像进行两点非均匀nuc校正的公式如式(1)所示:
12.picnucn=(pic
n-base)*k=picn*k-base*k
ꢀꢀ
(1)
13.其中,下标n表示前一帧和当前帧序号,n=1,2;picnucn为经过nuc校正后的图像;picn为校正前的图像;k为预存的增益系数,base是在实际情况下读取的本底图像。
14.进一步地,步骤s2得到特征图的计算公式为:
[0015][0016][0017][0018]
其中,fx和fy分别是水平方向和垂直方向的灰度梯度特征图,a是输入图像,f为最终灰度梯度特征图。
[0019]
进一步地,步骤s3中,获得二值化图像的公式为:
[0020][0021]
其中,m为2n
×
2n的图像块,输入图像灰度级》=y max的置1,否则为0;max(m)表示图像块中的灰度最大值;mean(m)表示图像块中灰度平均值。
[0022]
进一步地,步骤s4具体为:
[0023]
对进行二值化操作后前一帧初始模板和当前帧搜索区域分别进行行列投影匹配,其中位移计算范围为[-10,+10],位移量是以前一帧为基准,移动当前帧,长度与前一帧长度保持一致,逐个求差并求绝对值的和,得到误差最小值,并将得到的误差最小值与设置阈值sadlimit进行比较,如果实际得到的最佳位置误差值大于该阈值,则将位移量输出0,并标记;否则,该误差值对应的位置即为所需要的位移偏移量,即全局图像帧间位移(x,y),其中x和y表示的是当前帧整幅图像较于前一帧整幅图像在水平方向和垂直方向的位移量。
[0024]
进一步地,步骤s5中,修正本底补偿量的计算公式下式:
[0025]
pick1=pic1*k
[0026]
pick2=pic2*k
[0027]
basenow=base*k
[0028]
rawmodify=[pick1(i,j)-pick2(i+x,j+y)]-[basenow(i,j)-basenow(i+x,j+y)]
[0029]
其中,pic1和pic2分别是前一帧和当前帧的原始14bit图像;rawmodify是本底需要修正的补偿量;base是本底图像。
[0030]
进一步地,所述本底补偿量受更新规则限制,具体为:
[0031]
若|rawmodify|≥2
×
modlimit,其中modlimit为预设的本底更新阈值,则本底补偿量更新为rawmodify
*
:
[0032]
[0033]
如果|rawmodify|《2
×
modlimit,则本底补偿量更新为rawmodify
*
:
[0034][0035]
根据更新的本底补偿量,则最终得到的补偿量矩阵为:
[0036][0037]
其中modify初始化为相应大小的零矩阵,则最终更新的本底basen为:basen=basenow+modify。
[0038]
步骤s6中,得到当前帧非均匀nuc校正图像计算公式如下:
[0039]
picnuc=pic*k-basen
[0040]
其中picnuc为当前帧非均匀nuc校正图像。
[0041]
与现有技术相比,本发明的有益效果包括:有效消除固定噪声、高频噪声和低频噪声,提高非均匀性校正的效率和准确性,并节省运算资源,无需挡片作为基准。
附图说明
[0042]
图1是本发明方法的流程图。
具体实施方式
[0043]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0044]
请参考图1,图1是本发明方法的流程图;本发明包括以下步骤:
[0045]
s1、采集两帧图像,对两帧图像进行两点非均匀性nuc校正,得到两帧校正图像;
[0046]
需要说明的是,步骤s1中,采集两帧图像,对两帧图像进行两点nuc校正减少较差的本底中的非均匀性残留影响后续算法采集两帧图像,对两帧图像进行两点nuc校正减少较差的本底中的非均匀性残留影响后续算法;其中对两帧图像进行两点非均匀nuc校正的公式如式(1)所示:
[0047]
picnucn=(pic
n-base)*k=picn*k-base*k
ꢀꢀ
(1)
[0048]
其中,下标n表示前一帧和当前帧序号,n=1,2;picnucn为经过nuc校正后的图像;picn为校正前的图像;k为预存的增益系数,base是在实际情况下读取的本底图像。
[0049]
s2、采用prewitt算子对校正图像进行图像灰度梯度特征提取,得到特征图;
[0050]
需要说明的是,步骤s2中,对采集的两帧图像采用prewitt算子提取图像灰度梯度特征,在水平方向和垂直方向通过3
×
3卷积模板与图像中的每个像素点做卷积和运算实现;得到特征图的计算公式为:
[0051]
[0052][0053][0054]
其中,fx和fy分别是水平方向和垂直方向的灰度梯度特征图,a是输入图像,f为最终灰度梯度特征图。
[0055]
s3、查找特征图最亮点,并以最亮点为中心上下左右各扩展n个像素,获取2n
×
2n大小图像块,并对图像块进行二值化操作,获得两帧二值化图像;
[0056]
作为一种实施例,本发明中,n=128;
[0057]
在步骤s3中,对特征图查找最大值,并以最大值位置为中心上下左右各扩展64个像素,获取128
×
128大小图像块,并对进行二值化操作,二值化灰度阈值ymax则为图像块中最大灰度值和图像块中灰度均值和的1/2,实现二值化。其公式如式(3)所示:
[0058][0059]
其中,m为128
×
128的图像块,输入图像灰度级》=ymax的置1,否则为0。
[0060]
s4:对两帧二值化图像进行行列投影匹配,获得偏移量信息;
[0061]
需要说明的是,步骤s4具体为:
[0062]
对进行二值化操作后前一帧初始模板和当前帧搜索区域分别进行行列投影匹配,其中位移计算范围为[-10,+10],位移量是以前一帧为基准,移动当前帧,长度与前一帧长度保持一致,逐个求差并求绝对值的和,得到误差最小值,并将得到的误差最小值与设置阈值sadlimit进行比较,如果实际得到的最佳位置误差值大于该阈值,则将位移量输出0,并标记;否则,该误差值对应的位置即为所需要的位移偏移量,即全局图像帧间位移(x,y),其中x和y表示的是当前帧整幅图像较于前一帧整幅图像在水平方向和垂直方向的位移量。
[0063]
s5:根据偏移量信息,将两帧图像的重叠部分进行相减运算,计算更新本底需要的补偿量,对本底进行修正;
[0064]
需要说明的是,根据偏移量信息,将两帧图像的重叠部分进行相减运算,计算更新本底需要补偿量,对本底进行更新。具体为:x和y表示的是当前帧整幅图像较于前一帧整幅图像在水平方向和垂直方向的位移量。
[0065]
那么更新本底需要补偿量的计算,如下式:
[0066]
pick1=pic1*k
[0067]
pick2=pic2*k
[0068]
basenow=base*k
[0069]
rawmodify=[pick1(i,j)-pick2(i+x,j+y)]-[basenow(i,j)-basenow(i+x,j+y)]
[0070]
其中,pic1和pic2分别是前一帧和当前帧的原始14bit图像;rawmodify是本底需要修正的补偿量;base是本底图像。
[0071]
为了避免在目标匹配过程中计算错误,导致本底迅速恶化,将其更新值限制。modlimit为本底更新阈值,更新规则如下:
[0072]
若|rawmodify|≥2
×
modlimit,其中modlimit为预设的本底更新阈值,则本底补偿量更新为rawmodify
*
:
[0073][0074]
如果|rawmodify|《2
×
modlimit,则本底补偿量更新为rawmodify
*
:
[0075][0076]
根据更新的本底补偿量,则最终得到的补偿量矩阵为:
[0077][0078]
其中modify初始化为相应大小的零矩阵,则最终更新的本底basen为:basen=basenow+modify。
[0079]
s6:采用经过修正的本底,对当前帧图像进行非均匀nuc校正,得到当前帧非均匀nuc校正图像。
[0080]
步骤s6中,得到当前帧非均匀nuc校正图像计算公式如下:
[0081]
picnuc=pic*k-basen
[0082]
其中picnuc为当前帧非均匀nuc校正图像。
[0083]
本发明的有益效果是:有效消除固定噪声、高频噪声和低频噪声,提高非均匀性校正的效率和准确性,并节省运算资源,无需挡片作为基准。
[0084]
应理解,上述实施例中各步骤的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术实施例的实施过程构成任何限定。
[0085]
以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1