一种基于三维点云的苹果果梗和花萼检测方法
1.本发明属于检测技术领域,具体地说,本发明涉及一种基于三维点云的苹果果梗和花萼检测方法。
背景技术:
2.中国是苹果生产和消费大国,市场规模巨大,产量居世界前列。随着社会消费水平的不断攀升,人们对安全且优质苹果的需求越来越高。苹果品质的评价指标主要包括果形、质量、颜色、病虫害、机械损伤等。
3.传统苹果品质检测多采用人工或机械方式,耗时耗力,可靠性偏低,且易造成机械损伤。机器视觉具有非接触、速度快、精度高等优点,广泛应用于苹果品质检测,逐渐取代了传统人工或机械检测方式。然而,苹果外部缺陷与果梗花萼的颜色特征相似,传统基于颜色特征的二维图像检测技术难以有效区分,容易将果梗花萼误识别为外部缺陷。
4.申请号为202011307487x的发明专利,利用面结构光技术重建出苹果三维面形,根据果梗花萼的凹形特征,结合灰度形态学填充算法,检测到果梗花萼区域,但该方法需要构建多组三维图,导致果梗花萼的检测效率偏低。因此,如何准确且快速地检测出苹果果梗花萼具有重要意义和应用价值。
技术实现要素:
5.本发明提供一种基于三维点云的苹果果梗和花萼检测方法,以解决上述背景技术中存在的问题。
6.为了实现上述目的,本发明采取的技术方案为:一种基于三维点云的苹果果梗和花萼检测方法,具体包括以下步骤:
7.步骤s1:利用三维传感设备采集待测苹果的稠密三维点云,并转换为苹果深度图d(x,y),其中(x,y)表示三维点云沿着x轴和y轴方向的像素坐标,d(x,y)表示三维点云沿着z轴方向的深度值,然后将苹果深度图d(x,y)传输至计算机进行分析处理;
8.步骤s2:计算苹果深度图d(x,y)的最大深度值d
max
和最小深度值d
min
,在深度区间[d
min
,d
max
]等步长选择m个深度阈值tm,依次将苹果深度图d(x,y)进行二值化,获得m个二值图像bm(x,y);
[0009]
步骤s3:利用二维凸包算法获得二值图像bm(x,y)的凸包图像am(x,y),将凸包图像am(x,y)与二值图像bm(x,y)作差,获得凸残差区域qm(x,y);
[0010]
步骤s4:根据果梗花萼的凹形特征,凸残差区域qm(x,y)可认为属于果梗花萼区域;融合所有的凸残差区域qm(x,y),并通过形态学滤波消除毛刺和狭缝,获得完整的果梗花萼区域的掩膜图像q(x,y)。
[0011]
优选的,所述步骤s1中,所述三维传感设备可采用散斑投影法、条纹投影法、线激光扫描法。
[0012]
优选的,所述步骤s2中,所选择的m个深度阈值tm可表示为:
[0013][0014]
式中:m=1,2,
…
,m;m表示深度阈值tm的数目,其取值区间为[20,40]。
[0015]
优选的,所述步骤s2中,所述二值图像bm(x,y)的计算公式如下:
[0016][0017]
优选的,所述步骤s3中,所述凸残差区域qm(x,y)的计算公式如下:
[0018]
qm(x,y)=am(x,y)-bm(x,y)。
[0019]
优选的,所述步骤s4中,所述果梗花萼区域的掩膜图像q(x,y),其计算公式如下:
[0020]
q(x,y)=q1(x,y)∪q2(x,y)∪
…
∪qm(x,y)。
[0021]
采用以上技术方案的有益效果是:
[0022]
1、本发明的基于三维点云的苹果果梗和花萼检测方法,根据果梗花萼的凹形特征,无需重建苹果三维面形,通过采集苹果的稠密三维点云,并将深度图进行阈值分割,结合二维凸包算法,有效地检测出果梗花萼区域,具有非接触、成本低、精度高、速度快、鲁棒性强的优点。
附图说明
[0023]
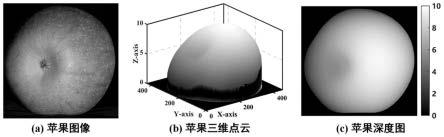
图1中(a)苹果图像;(b)苹果三维点云;(c)苹果深度图;
[0024]
图2展示了二值图像b5(x,y)、b
10
(x,y)和b
20
(x,y);
[0025]
图3展示了凸包图像a5(x,y)、a
10
(x,y)和a
20
(x,y);
[0026]
图4展示了凸残差区域q5(x,y)、q
10
(x,y)和q
20
(x,y);
[0027]
图5展示了形态学滤波前后的果梗花萼区域及其边缘;
具体实施方式
[0028]
下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,目的是帮助本领域的技术人员对本发明的构思、技术方案有更完整、准确和深入的理解,并有助于其实施。
[0029]
如图1至图5所示,本发明是一种基于三维点云的苹果果梗和花萼检测方法,根据果梗花萼的凹形特征,无需重建苹果三维面形,通过采集苹果的稠密三维点云,并将深度图进行阈值分割,结合二维凸包算法,有效地检测出果梗花萼区域,具有非接触、成本低、精度高、速度快、鲁棒性强的优点。
[0030]
以下用具体实施例对具体工作方式进行阐述:
[0031]
实施例1:
[0032]
本发明提供一种基于三维点云的苹果果梗和花萼检测方法,具体包括以下步骤:
[0033]
步骤s1:图1(a)展示了待测苹果图像,利用三维传感设备采集待测苹果的稠密三维点云,如图1(b)所示,并转换为苹果深度图d(x,y),如图1(c)所示,其中(x,y)表示三维点云沿着x轴和y轴方向的像素坐标,d(x,y)表示三维点云沿着z轴方向的深度值,然后将苹果深度图d(x,y)传输至计算机进行分析处理;
[0034]
步骤s2:计算苹果深度图d(x,y)的最大深度值d
max
和最小深度值d
min
,在深度区间
[d
min
,d
max
]等步长选择m=30个深度阈值tm,依次将苹果深度图d(x,y)进行二值化,获得m=30个二值图像bm(x,y),如图2所示;
[0035]
步骤s3:利用二维凸包算法获得二值图像bm(x,y)的凸包图像am(x,y),如图3所示;将凸包图像am(x,y)与二值图像bm(x,y)作差,获得凸残差区域qm(x,y),如图4所示;
[0036]
步骤s4:根据果梗花萼的凹形特征,凸残差区域qm(x,y)可认为属于果梗花萼区域;融合所有的凸残差区域qm(x,y),并通过形态学滤波消除毛刺和狭缝,获得完整的果梗花萼区域的掩膜图像q(x,y),图5分别展示了形态学滤波前后的果梗花萼区域及其边缘。
[0037]
以上结合附图对本发明进行了示例性描述,显然,本发明具体实现并不受上述方式的限制,只要是采用了本发明的方法构思和技术方案进行的各种非实质性的改进;或未经改进,将本发明的上述构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1