一种用于健身镜自动人体感应识别的装置及其方法与流程
1.本发明涉及健身识别设备辅助装置技术领域,尤其涉及一种用于健身镜自动人体感应识别的装置及其方法。
背景技术:
2.传统ai动作识别要先进行姿势识别,再进行动作识别,识别需要先后进行两次推理计算。
3.传统动作识别推理需要高精度的姿势识别获得的数据,高精度姿势推理也需要较高的推理算力,传统动作识别推理也需要较高的推理算力。
4.ai推理计算需要使用神经网络处理器,而高算力的神经网络处理器则有着高数据带宽、高运算存储空间等要求,进一步推高了计算设备平台的成本。
技术实现要素:
5.针对上述技术问题,本发明的目的是提供一种用于健身镜自动人体感应识别的装置及其方法,通过设置识别模块、计算模块和修正模块可以使用低分辨率姿势识别模型进行姿势推理,如53
×
53输出的模型,降低姿势识别算力需求,从而大幅降低设备成本。
6.本发明的上述技术目的是通过以下技术方案得以实现的:
7.一种用于健身镜自动人体感应识别的装置及其方法,包括健身镜主体和设置于所述健身镜主体上部的采集摄像头,所述健身镜主体包括镜框和反射镜,所述镜框底部设置有减震装置,所述镜框内设置有中央处理器,所述中央处理器包括识别模块、计算模块、修正模块、对比模块、输入模块和输出模块。
8.通过采用上述技术方案,本装置在使用时首先将镜框固定在减震装置上,清理采集摄像头,完成后,减震装置可保证整个镜框稳定,不会由于地面振动对摄像头造成影响,通过摄像头和中央处理器的配合,可完成识别采点,计算,修正,对比,和实时输出功能。
9.本发明进一步设置为:在本装置使用时,具体使用步骤如下:
10.1.要求用户站立的时通过所述采集摄像头和所述识别模块进行一次姿势识别,得到站立坐标结果;
11.2.要求用户举起双手再通过所述采集摄像头和所述识别模块进行一次姿势识别,得到举手坐标结果;
12.3.获得坐标后便可以进入实际的使用过程,通过计算模块得到姿势坐标,根据所述输入模块输入的标准数据得到运动特征表。
13.4.通过所述对比模块实现动作相似度对比,无需采用传统神经网络训练的方式实现,将标准动作进行实时识别,并得出标准动作特征表,只需要将动作特征表或特征表中关键特征和标准特征表进行比对即可。
14.通过上述步骤,可实现通过预先校准动作,确定参考稳心。可实现通过特定方法计算的出动作特征表。使用动作特征表实现动作相似度比对。在特定方法中,动作是姿势的连
续组合,一个姿势可以只有一个关键特征、也可以有多个关键特征,也可以是和参考值进行对比的比值特征。
15.本发明进一步设置为:所述识别装置配合所述采集摄像头可自动拾取包括双手、双肘、双肩、跨部、双膝、双脚、颈部和头部等作为基准点,并记录实时跟踪。
16.通过采用上述技术方案,可准确采集并跟踪人体关节等运动复杂部位。
17.本发明进一步设置为:所述修正模块可将所述站立坐标和所述举手坐标进行线性拟合,修正运动人员穿衣时造成识别点误差。
18.通过采用上述技术方案,可进行计算实现对运动状态的实时计算修正。
19.本发明进一步设置为:所述修正模块可根据头部拾取的基准点判断人体倾斜程度并实时修正运算结果。
20.通过采用上述技术方案,可在人体运动倾斜时依然准确拾取点位进行修正从而保证采集运算精度。
21.本发明进一步设置为:其特征在于:所述减震装置包括底座,所述底座底部设置有胶垫,所述底座底座顶部设置有安装槽,所述底座内部中空,且设置有振动杆,所述振动杆底部与所述底座连接,所述底座于中空处设置有弹簧,所述弹簧一端与所述振动杆连接,另一端与所述底座连接,所述弹簧中部设置有重块。
22.通过采用上述技术方案,可减少地面振动对本装置的影响。
23.本发明进一步设置为:所述镜框顶部转动连接有毛刷,所述毛刷呈n字型,所述毛刷内侧靠近反射镜一侧设置有刷毛,所述毛刷远离所述反射镜一侧与所述振动杆通过弹簧连接,所述毛刷与所述镜框之间设置有扭簧。
24.通过采用上述技术方案,可将地面振动转化为毛刷的动能从而清理摄像头。
25.综上所述,本发明的有益技术效果为:
26.(1)通过摄像头和中央处理器的配合,可完成高精度识别采点,计算,修正,对比,和实时输出功能。
27.(2)可准确采集并跟踪人体关节等运动复杂部位。可进行计算实现对运动状态的实时计算修正。可在人体运动倾斜时依然准确拾取点位进行修正从而保证采集运算精度。
28.(3)可减少地面振动对本装置的影响,可将地面振动转化为毛刷的动能从而清理摄像头。
附图说明
29.图1是本发明一个实施例的人体站立踩点示意图;
30.图2是本发明一个实施例的人体伸展采点示意图;
31.图3是本发明一个实施例的人体运动采点示意图;
32.图4是本发明一个实施例的人体面部采点示意图;
33.图5是本发明一个实施例的人体面部采点示意图;
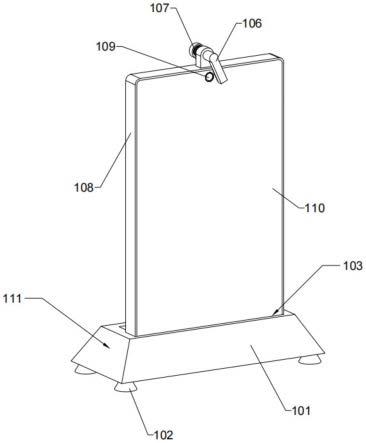
34.图6是本发明一个实施例的整体结构示意图
35.图7是本发明一个实施例的整体结构剖视示意图。
36.附图标记:1、颈部;10、中心;11、鼻头;12、左眼部;13、右眼部;14、左耳部;15、右耳部;21、左侧肩;22、左侧肘;23、左侧手;31、右侧肩;32、右侧肘;33、右侧手; 41、左侧髋;42、
左侧膝;43、左侧脚;51、右侧髋;52、右侧膝;53、右侧脚;101、底座; 102、胶垫;103、安装槽;104、振动杆;105、重块;106、毛刷;107、扭簧;108、镜框; 109、采集摄像头;110、反射镜;111、减震装置。
具体实施方式
37.下面将结合实施例对本发明进行清楚、完整地描述。
38.参见附图1-附图5,一种用于健身镜自动人体感应识别的装置及其方法,包括健身镜主体和设置于所述健身镜主体上部的采集摄像头109,所述健身镜主体包括镜框108和反射镜 110,所述镜框108底部设置有减震装置111,所述镜框108内设置有中央处理器,所述中央处理器包括识别模块、计算模块、修正模块、对比模块、输入模块和输出模块。所述识别装置配合所述采集摄像头109可自动拾取包括双手、双肘、双肩、跨部、双膝、双脚、颈部1 和头部等作为基准点,并记录实时跟踪。所述修正模块可将所述站立坐标和所述举手坐标进行线性拟合,修正运动人员穿衣时造成识别点误差。所述修正模块可根据头部拾取的基准点判断人体倾斜程度并实时修正运算结果。
39.本装置在使用时,使用步骤如下:
40.1.参见附图1,要求用户站立的时通过所述采集摄像头和所述识别模块进行一次姿势识别,得到站立坐标结果;
41.如模型可推理出颈部1坐标则直接使用,如没有颈部1坐标可通过双肩21、31坐标取中点得出。
42.根据双肩21、31和双髋41、51计算中心点的到人体中心坐标10。
43.当双手23、33和双肘22、32分别处在双肩21、31正下方附近,并且双脚43、53和双膝42、52分别处在41、51正下方附近,头部11处在颈部1正上方附近,头部11到中心10 的距离和双脚43、53的距离比值在人体合理范围0.34~0.52之间时,则认为人已经站稳。连续计算一段时间如10帧或1秒后,取稳定的中心点10作为参考稳心m,其稳心高度表示为 my,稳心中轴表示为mx。
44.2.参见附图2,要求用户举起双手再通过所述采集摄像头和所述识别模块进行一次姿势识别,得到举手坐标结果;
45.在实际使用中,举起手时会带动衣服,通常会导致肩部、髋部、膝盖等推理计算坐标较实际位置偏高,此时可将站立坐标和举手坐标进行线性拟合,修正举手时产生的连带误差,得出较精准的坐标结果,并修正稳心m。
46.向量长度(21、23)和向量长度(31、33)为用户参考臂长。
47.向量长度(41、43)和向量长度(51、53)为用户参考腿长。
48.向量长度(21、41)和向量长度(31、51)的平均数为为用户参考体长。
49.向量长度(11、0)为用户参考身高比例。
50.3.参见附图3,获得坐标后便可以进入实际的使用过程,通过计算模块得到姿势坐标,根据所述输入模块输入的标准数据得到运动特征表;
51.中心点10相对稳心中轴mx的偏移值为体偏移,为正负值右侧为正值。
52.中心点10相对稳心高度my的偏移值为体上升,为正负值右侧为正值。
53.如图4所示,鼻子或头11相对于头宽或耳朵距离14、15或眼部12距离12、13的左右
相对比值为头转向、为正负值右侧为正。
54.如图5所示,头倾斜不会对头转向比值产生影响,头11相对颈部1的角度为头倾斜,默认垂直向上归零,为正负角度值右侧为正值。
55.颈部1相对中心10的角度为体倾斜,默认垂直向上归零,为正负角度值右侧为正值。
56.左侧手23、肘22相对肩21的角度为手、肘抬起,默认垂直向下归零,为正负角度值外侧为正值。
57.右侧手33、肘32相对肩31的角度为手、肘抬起,默认垂直向下归零,为正负角度值外侧为正值。
58.左侧脚43、膝42相对髋41的角度为脚、腿抬起,默认垂直向下归零,为正负角度值外侧为正值。
59.右侧脚53、膝52相对髋51的角度为脚、腿抬起,默认垂直向下归零,为正负角度值外侧为正值。
60.还可以计算得出臂长和参考臂长比、腿长和参考腿长比等对比值。
61.特征表所含特征包含但不局限于上述特征。
62.4.通过所述对比模块实现动作相似度对比,无需采用传统神经网络训练的方式实现,将标准动作进行实时识别,并得出标准动作特征表,只需要将动作特征表或特征表中关键特征和标准特征表进行比对即可。
63.一个动作是多个姿势的连续组合。一个姿势可以只有一个关键特征、也可以有多个关键特征,也可以是和参考值进行对比的比值特征。
64.例如:跳起并回落动作识别可以通过身高比例值不变,体上升变大再归零来实现识别。弯腰可通过腿长比例值不变,身高比例值减少来实现识别。左右横跳可通过体偏移正负变化来实现识别等等。
65.结合附图6,附图7,所述减震装置111包括底座101,所述底座101底部设置有胶垫102,所述底座101底座101顶部设置有安装槽103,所述底座101内部中空,且设置有振动杆104,所述振动杆104底部与所述底座101连接,所述底座101于中空处设置有弹簧,所述弹簧一端与所述振动杆104连接,另一端与所述底座101连接,所述弹簧中部设置有重块105。所述镜框108顶部转动连接有毛刷106,所述毛刷106呈n字型,所述毛刷106内侧靠近反射镜110一侧设置有刷毛,所述毛刷106远离所述反射镜110一侧与所述振动杆104通过弹簧连接,所述毛刷106与所述镜框108之间设置有扭簧107。
66.在本装置使用时,通过设置振动杆,带动毛刷可将振动转化为毛刷运动的动能,设置弹簧和重块可将底座上产生的振动传导到振动杆上,可减少地面振动对本装置的影响,可将地面振动转化为毛刷的动能从而清理摄像头。
67.5.本实施例的工作原理是:参见附图1,要求用户站立的时通过所述采集摄像头和所述识别模块进行一次姿势识别,得到站立坐标结果;
68.如模型可推理出颈部1坐标则直接使用,如没有颈部1坐标可通过双肩21、31坐标取中点得出。
69.根据双肩21、31和双髋41、51计算中心点的到人体中心坐标10。
70.当双手23、33和双肘22、32分别处在双肩21、31正下方附近,并且双脚43、53和双膝
42、52分别处在41、51正下方附近,头部11处在颈部1正上方附近,头部11到中心10 的距离和双脚43、53的距离比值在人体合理范围0.34~0.52之间时,则认为人已经站稳。连续计算一段时间如10帧或1秒后,取稳定的中心点10作为参考稳心m,其稳心高度表示为 my,稳心中轴表示为mx。
71.6.参见附图2,要求用户举起双手再通过所述采集摄像头和所述识别模块进行一次姿势识别,得到举手坐标结果;
72.在实际使用中,举起手时会带动衣服,通常会导致肩部、髋部、膝盖等推理计算坐标较实际位置偏高,此时可将站立坐标和举手坐标进行线性拟合,修正举手时产生的连带误差,得出较精准的坐标结果,并修正稳心m。
73.向量长度(21、23)和向量长度(31、33)为用户参考臂长。
74.向量长度(41、43)和向量长度(51、53)为用户参考腿长。
75.向量长度(21、41)和向量长度(31、51)的平均数为为用户参考体长。
76.向量长度(11、0)为用户参考身高比例。
77.7.参见附图3,获得坐标后便可以进入实际的使用过程,通过计算模块得到姿势坐标,根据所述输入模块输入的标准数据得到运动特征表;
78.中心点10相对稳心中轴mx的偏移值为体偏移,为正负值右侧为正值。
79.中心点10相对稳心高度my的偏移值为体上升,为正负值右侧为正值。
80.如图4所示,鼻子或头11相对于头宽或耳朵距离14、15或眼距离12、13的左右相对比值为头转向、为正负值右侧为正。
81.如图5所示,头倾斜不会对头转向比值产生影响,头11相对颈部1的角度为头倾斜,默认垂直向上归零,为正负角度值右侧为正值。
82.颈部1相对中心10的角度为体倾斜,默认垂直向上归零,为正负角度值右侧为正值。
83.左侧手23、肘22相对肩21的角度为手、肘抬起,默认垂直向下归零,为正负角度值外侧为正值。
84.右侧手33、肘32相对肩31的角度为手、肘抬起,默认垂直向下归零,为正负角度值外侧为正值。
85.左侧脚43、膝42相对41的角度为脚、腿抬起,默认垂直向下归零,为正负角度值外侧为正值。
86.右侧脚53、膝52相对髋51的角度为脚、腿抬起,默认垂直向下归零,为正负角度值外侧为正值。
87.还可以计算得出臂长和参考臂长比、腿长和参考腿长比等对比值。
88.特征表所含特征包含但不局限于上述特征。
89.8.通过所述对比模块实现动作相似度对比,无需采用传统神经网络训练的方式实现,将标准动作进行实时识别,并得出标准动作特征表,只需要将动作特征表或特征表中关键特征和标准特征表进行比对即可。
90.一个动作是多个姿势的连续组合。一个姿势可以只有一个关键特征、也可以有多个关键特征,也可以是和参考值进行对比的比值特征。
91.例如:跳起并回落动作识别可以通过身高比例值不变,体上升变大再归零来实现
识别。弯腰可通过腿长比例值不变,身高比例值减少来实现识别。左右横跳可通过体偏移正负变化来实现识别等等。
92.以上所述,仅为本发明较佳的具体实施方式,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1