一种基于耦合几何和曲率一致性约束的深度图像配准方法
21.其中,pi(xi)为像素点xi对应的三维点坐标,p
i-1
(x
i-1
)为对应像素点x
i-1
的三维点坐标,n
i-1
(x
i-1
)为其法向量。
22.利用李群李代数与指数映射,上式进一步可以表示为:
23.ε≈||jξ+r||224.其中,j为雅可比矩阵,r为残差,ξ为六维向量,前三维为平移,后三维为旋转。
25.进一步地,所述步骤5具体为:优于前后两次测量数据的高斯曲率与测量坐标系的选择不关联,因此相对位姿增量δt
i-1,i
优化目标可以表示为,
[0026][0027]
其中,为xi处的图像梯度,为像素点对应的三维点的导数,为三维点相对变换矩阵的导数,j’为雅可比矩阵,r’为残差。
[0028]
进一步地,所述步骤6具体为:将几何一致性与曲率一致性约束耦合,得到以下目标函数:
[0029]
e=e+λe
′
[0030]
其中,λ为曲率误差权重因子,e为几何一致性误差,e’为曲率一致性误差。
[0031]
进一步地,所述步骤7具体为:上式的最小二乘解进一步可以求解下式得到
[0032]
(j
t
j+λj
′
tj′
)ξ=-(j
trt
+λj
′
tr′
)
[0033]
从而得到j、λ和优化e。
[0034]
本发明的优点在于:
[0035]
本发明提出了一种基于耦合几何和曲率一致性约束的深度图像配准方法,通过耦合几何约束和曲率约束,提升了深度图像配准的精度,并且整体方法简单,操作快捷。
附图说明
[0036]
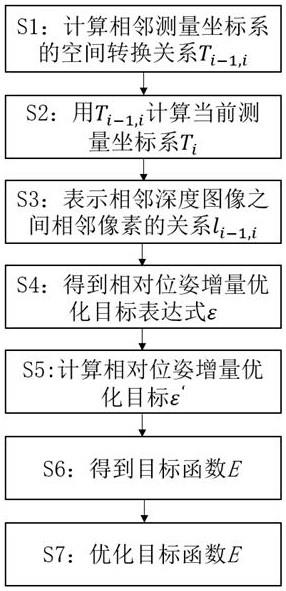
图1为本方法流程示意图。
具体实施方式
[0037]
基于该方法,下面对本发明的实施例做详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式,但本发明的保护范围不限于下述实施例。
[0038]
实施例1
[0039]
一种基于耦合几何和曲率一致性约束的深度图像配准方法,包含以下步骤:
[0040]
步骤1.计算相邻测量坐标系的空间转换关系t
i-1,i
;
[0041]
步骤2.用t
i-1,i
计算当前测量坐标系ti;
[0042]
步骤3.表示相邻深度图像之间相邻像素的关系l
i-1,i
;
[0043]
步骤4.得到相对位姿增量优化目标表达式ε;
[0044]
步骤5.计算相对位姿增量优化目标ε
‘
;
[0045]
步骤6.得到目标函数e;
[0046]
步骤7.优化目标函数e。
[0047]
本发明提出了一种基于耦合几何和曲率一致性约束的深度图像配准方法,通过耦合几何约束和曲率约束,提升了深度图像配准的精度,并且整体方法简单,操作快捷。
[0048]
实施例2
[0049]
步骤1以第一次测量时的相机坐标系作为参考坐标系,通过依次将第i次测量数据与第i-1次测量数据进行配准,就可以获得第i次测量坐标系相对第i-1次测量坐标系的空间变换关系t
i-1
,i=[r
i-1,i t
i-1,i
]。r为旋转矩阵,t为平移矩阵。
[0050]
步骤2第i次测量坐标系可以根据第i-1次测量坐标系和两坐标系之间的空间位姿t
i-1,i
得到,即
[0051]
ti=t
i-1
×
t
i-1,i
[0052]
步骤3在计算过程中,深度图像di中像素xi与深度图像d
i-1
中像素x
i-1
之间的关系可以表示为,
[0053][0054]
步骤4基于点到面距离误差度量,迭代过程相对位姿增量δt
i-1,i
优化目标为
[0055]
ε=∑||[δt
i-1,i
t
i-1,i
pi(xi)-p
i-1
(x
i-1
)]
·ni-1
(x
i-1
)||2[0056]
其中,pi(xi)为像素点xi对应的三维点坐标,p
i-1
(x
i-1
)为对应像素点x
i-1
的三维点坐标,n
i-1
(x
i-1
)为其法向量。
[0057]
利用李群李代数与指数映射,上式进一步可以表示为,
[0058]
ε≈||jξ+r||2[0059]
其中,j为雅可比矩阵,r为残差,ξ为六维向量(前三维为平移,后三维为旋转)。
[0060]
步骤5优于前后两次测量数据的高斯曲率与测量坐标系的选择不关联,因此相对位姿增量δt
i-1,i
优化目标可以表示为,
[0061][0062]
其中,为xi处的图像梯度,为像素点对应的三维点的导数,为三维点相对变换矩阵的导数,j’为雅可比矩阵,r’为残差。
[0063]
步骤6将几何一致性与曲率一致性约束耦合,得到以下目标函数
[0064]
e=e+λe
′
[0065]
其中,λ为曲率误差权重因子,e为几何一致性误差,e’为曲率一致性误差。
[0066]
步骤7上式的最小二乘解进一步可以求解下式得到
[0067]
(j
t
j+λj
′
tj′
)ξ=-(j
trt
+λj
′
tr′
)
[0068]
实施例3
[0069]
一种基于耦合几何和曲率一致性约束的深度图像配准方法,包含以下步骤:
[0070]
步骤1.计算相邻测量坐标系的空间转换关系t
i-1,i
;
[0071]
步骤2.用t
i-1,i
计算当前测量坐标系ti;
[0072]
步骤3.表示相邻深度图像之间相邻像素的关系l
i-1,i
;
[0073]
步骤4.得到相对位姿增量优化目标表达式ε;
[0074]
步骤5.计算相对位姿增量优化目标ε
‘
;
[0075]
步骤6.得到目标函数e;
[0076]
步骤7.优化目标函数e。
[0077]
进一步地,所述步骤1具体为:以第一次测量时的相机坐标系作为参考坐标系,通过依次将第i次测量数据与第i-1次测量数据进行配准,就可以获得当前测量坐标系相对上次测量坐标系的空间变换关系t
i-1,i
=[r
i-1,i t
i-1,i
]。
[0078]
进一步地,所述步骤2具体为:当前测量坐标系根据上一次测量坐标系和两坐标系之间的空间位姿t
i-1,i
得到,即
[0079]
ti=t
i-1
×
t
i-1,i
[0080]
进一步地,所述步骤3具体为:在计算过程中,深度图像di中像素xi与深度图像d
i-1
中像素x
i-1
之间的关系可以表示为,
[0081][0082]
为两个深度像素的关系。
[0083]
进一步地,所述步骤4具体为:基于点到面距离误差度量,迭代过程相对位姿增量δt
i-1,i
优化目标为
[0084]
ε=∑||(δt
i-1
t
i-1,i
pi(xi)-p
i-1
(x
i-1
)
·ni-1
(x
i-1
))||2[0085]
其中,pi(xi)为像素点xi对应的三维点坐标,p
i-1
(x
i-1
)为对应像素点x
i-1
的三维点坐标,n
i-1
(x
i-1
)为其法向量。
[0086]
利用李群李代数与指数映射,上式进一步可以表示为:
[0087]
ε≈||jξ+r||2[0088]
其中,j为雅可比矩阵,r为残差,ξ为六维向量,前三维为平移,后三维为旋转。
[0089]
进一步地,所述步骤5具体为:优于前后两次测量数据的高斯曲率与测量坐标系的选择不关联,因此相对位姿增量δt
i-1,i
优化目标可以表示为,
[0090][0091]
其中,为xi处的图像梯度,为像素点对应的三维点的导数,为三维点相对变换矩阵的导数,j’为雅可比矩阵,r’为残差。
[0092]
进一步地,所述步骤6具体为:将几何一致性与曲率一致性约束耦合,得到以下目标函数:
[0093]
e=e+λe
′
[0094]
其中,λ为曲率误差权重因子,e为几何一致性误差,e’为曲率一致性误差。
[0095]
进一步地,所述步骤7具体为:上式的最小二乘解进一步可以求解下式得到
[0096]
(j
t
j+λj
′
tj′
)ξ=-(j
trt
+λj
′
tr′
)
[0097]
从而得到j、λ和优化e。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1