一种大型反射面天线单块面板主动调整的促动器简化仿真实现方法
1.本发明公开了一种大型反射面天线单块面板主动调整的促动器简化仿真实现方法,能够精确实现促动器主动调整面板的仿真。该方法适用于各种大型反射面天线面板主动调整时的结构分析。
背景技术:
2.(1)随着深空探测、射电天文学等技术的发展和需求,大型反射面天线不断向高频率、高增益、高指向精度方向发展。反射面是天线的功能形状,用于反射和接收电磁波,其精度直接影响天线的电性能。对于孔径达数十米、面板数千面、重量数千吨的高精度天线,实际工程制造很难达到毫米甚至亚毫米的反射面精度。由于重力、风载荷、温度等自然因素的影响,天线结构会发生变形,为了达到所要求的表面精度,通常采用补偿技术来减少相应的误差。主动面技术是目前用于补偿反射面误差、达到表面精度要求的一种有效且广泛应用的方法。
3.(2)促动器是主动调整技术的关键部分,但在实际工程应用中样式不一、结构复杂且数量众多。例如,美国的green bank telescope(gbt)拥有2209个促动器,由电机驱动滚珠丝杠来调节面板的位置,当面板到达理想位置时自锁装置能够停止促动器对面板的调整。意大利的sardinia radio telescope(srt)以共享促动器的形式分布有1116个促动器,它也由步进电机和减速机构组成,但为了防止滚珠丝杠承受径向力,直线滑块上设有滑动轴承。各大型反射面天线使用的促动器还连接各种传感器和控制系统,使主动调整更加精确与稳定,但其结构复杂且数量众多。可见,想要在仿真中建立真实的促动器模型不但要花费大量的时间与精力,而且计算量庞大、计算时间长,不利于相关的优化计算。因此,有必要根据实际促动器主动调整面板的运动特性对促动器进行简化来进行仿真分析。
4.(3)在主动调整的仿真中,除了施加节点载荷的方法,还能够通过约束背架与短梁的节点位移来进行,但这种方法会使背架无法受到来自短梁和面板的作用,导致背架失去原有的支撑作用。另一方面,若约束了面板与短梁连接节点的位移,则在单个促动器主动调整面板时,其他短梁的作用会失效,进而导致面板形面变形不准确,失去仿真意义。
技术实现要素:
5.(1)本发明的目的在于避免背景技术中的不足之处而提供一种高精度、高效率的大型反射面天线单块面板主动调整的促动器简化仿真实现方法。
6.(2)本发明的技术方案为:提供了一种起主动调整作用的促动器简化仿真实现方法,其特征在于把促动器简化为短梁,在短梁两端施加轴向内力,从而起调整面板位置的作用。
7.所述的短梁能够传递来自面板与背架的轴力、弯矩和扭矩。所述施加的轴力是为了模拟实际促动器调整面板时的运动特性。
8.(3)大型反射面天线单块面板主动调整的促动器简化仿真实现方法,包括如下步骤:1)将促动器的复杂结构简化为短梁,并根据大型反射面天线的结构参数和材料属性,在ansys软件中建立简化后的单块面板的主动调整有限元模型。
9.2)经面板的网格划分后,提取背架、短梁和面板的各节点坐标和单元信息。
10.3)根据各单元的力学特性和节点坐标计算各单元用于有限元结构计算的刚度矩阵,按照各节点自由度顺序构建整体模型的刚度矩阵。
11.4)计算施加重力等导致面板变形的载荷时各单元等效节点载荷并按照节点顺序整合为载荷列向量。
12.5)设一个全部由不同未知数组成的列向量为节点位移向量,与上述整体刚度方程、载荷列向量组成整体刚度方程:为了方便计算,将方程中的矩阵进行初等变换,即矩阵或向量中短梁两端节点的轴向位移、刚度或载荷移至最后,则上式各矩阵可表示为:轴向位移、刚度或载荷移至最后,则上式各矩阵可表示为:轴向位移、刚度或载荷移至最后,则上式各矩阵可表示为:其中、、、 为整体刚度矩阵的子阵,和为促动器两端轴向节点位移向量,为剩余节点位移向量,和为促动器两端轴向节点载荷向量,为剩余节点载荷向量,为施加给短梁两端的载荷向量。
13.6)将已知的促动器调整量(面板与促动器连接节点的位移)代入方程,计算整体刚度方程,得到促动器调整面板到目标位置所需载荷。
14.7)将载荷输入简化后的ansys仿真模型,得到促动器主动调整完成后的天线各节点位移及相关数据。
15.8)通过比较主动调整前后的促动器节点位移是否为促动器调整量来判断该方法的正确性和有效性,该方法能够使面板调整到目标位置,促动器主动调整面板的仿真得到实现。
16.(4)附图说明:1)图1是简化后的主动调整结构示意图。
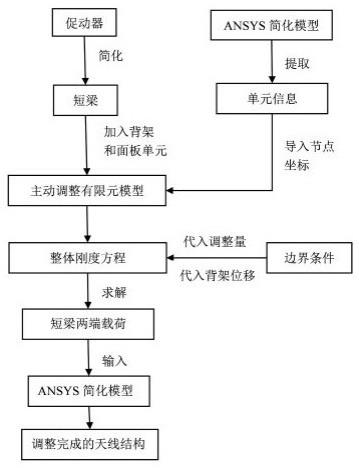
17.2)图2是本发明的流程图。
18.3)图3是主动调整前面板变形云图。
19.4)图4是主动调整后面板变形云图。
20.(5)具体实施方式:参照图1和图2,大型反射面天线主动调整过程的促动器简化仿真实现方法,包括如下步骤:1)将促动器结构简化为短梁,使用ansys建立简化后未进行主动调整的有限元模型并对面板进行三角形网格划分,其中背架使用link8单元,促动器使用beam4单元,面板使用shell63单元,模型如图1的右图所示。由于该模型背架的下弦节点(不与短梁连接的节点)固接,所以其节点位移为0。该模型的面板密度、杨氏模量和泊松比分别为2.73
×
10-6 kg/mm3、7.1
×
10
7 mp和0.3。梁的密度、杨氏模量、泊松比、横截面积和惯性矩分别为7.85
×
10-9 kg/mm3、2.1
×
10
5 mp、0.3、400 πmm2和4000 πmm,背架的密度、杨氏模量和泊松比分别为7.85
×
10-9 kg/mm3、2.1
×
10
5 mp、0.3。面板为长、宽各2000 mm,厚度4 mm的板壳。背架与短梁的连接节点均在距离面板角点长、宽400 mm,高200 mm处,背架下弦节点距上弦节点200 mm处。
21.2)提取ansys的简化模型各节点坐标并计算各单元的刚度矩阵。其中,杆单元的刚度矩阵按照标准有限元流程计算为:其中:为杨氏模量,为杆单元的横截面积,为杆长。
22.梁单元不仅承受轴力和弯矩,还能承受扭矩的作用,其刚度方程由几个方面组成。
23.梁单元的轴向位移对应的刚度矩阵与杆单元相同:当梁单元受扭转作用时,对应的刚度矩阵为:其中:为剪切模量,为横截面的扭转惯性矩。
24.梁在纯弯曲情况下对应的刚度矩阵为:梁在纯弯曲情况下对应的刚度矩阵为:其中:、为惯性矩。
25.将上述各刚度矩阵按节点位移顺序整合便能得到beam4单元的刚度矩阵。
26.壳单元由膜单元部分和弯曲单元部分组成。其中弯曲单元部分可使用discrete kirchhoff theory(dkt)单元来计算:theory(dkt)单元来计算:theory(dkt)单元来计算:theory(dkt)单元来计算:theory(dkt)单元来计算:theory(dkt)单元来计算:
其中:其中:其中:其中:其中:(y同理)当=23,32,12时,为4,5,6。、分别表示面积坐标的和。
27.可用三点高斯积分法求得。
28.膜单元部分可以采用改进后的wilson非协调元来计算,其刚度矩阵为:膜单元部分可以采用改进后的wilson非协调元来计算,其刚度矩阵为:膜单元部分可以采用改进后的wilson非协调元来计算,其刚度矩阵为:膜单元部分可以采用改进后的wilson非协调元来计算,其刚度矩阵为:
其中:为三角形1号节点x坐标(y同理),为雅克比矩阵。可用一点高斯积分法求得。
29.由于壳单元有6个自由度,所以还需要加入垂直于膜表面的旋转自由度,类似弹簧刚度:刚度:刚度:刚度:其中:、、为局部坐标方向余弦,为罚参数,取0.01,为单元体积,为剪切模量,为三角形面积。
30.为防止数值上的不稳定,还要在、和处加上一个小刚度:将弯曲单元和膜单元按照节点自由度顺序整合,得到shell63单元的刚度矩阵。
31.将上述3种单元进行空间坐标变换后代入各节点坐标,按照节点编号整合,得到整体刚度矩阵。
32.3)由于本案例只对重力载荷进行分析,故计算重力下各单元的节点等效载荷并按照节点顺序整合为载荷列向量。
33.4)设一个全部由不同未知数组成的列向量为节点位移向量,与上述整体刚度方程、载荷列向量组成整体刚度方程:为了方便计算,将方程中的矩阵进行初等变换,即矩阵或向量中短梁两端节点的轴向位移、刚度或载荷移至最后,则上式各矩阵可表示为:轴向位移、刚度或载荷移至最后,则上式各矩阵可表示为:
其中、、、 为整体刚度矩阵的子阵,和为促动器两端轴向节点位移向量,为剩余节点位移向量,和为促动器两端轴向节点载荷向量,为剩余节点载荷向量,为施加给短梁两端的载荷向量。
34.5)本案例中每个促动器调整量为3 mm(相对于变形后的短梁拉伸3 mm),4个背架上弦节点位移分别为-1.01712343554 mm、-1.01777483809 mm、-1.01712343553 mm、-1.01777483809 mm,将上述数据组成的向量代入对应短梁节点位移,把短梁对应节点载荷设为未知数,移除背架下弦节点的刚度、位移和载荷后计算整体刚度方程,得到4根短梁调整面板到达目标位置所需载荷的大小分别为3958406.74351863n 、3958406.74352420n、3958406.74353122 n、3958406.74352696 n、-3958406.74351863 n、-3958406.74352420 n、-3958406.74353122 n、-3958406.74352696 n(正负代表轴向方向)。
35.6)将载荷输入简化后的ansys仿真模型中,得到促动器主动调整完成后的天线各节点位移及相关数据。
36.7)对比结果,主动调整后短梁与面板连接节点的位移分别为1.900924995667 mm、1.901951359366 mm、1.900924995676 mm、1.901951359368 mm,而主动调整前这些节点的位移分别为-1.099075004329 mm、-1.098048640634 mm、-1.099075004329 mm、-1.098048640634 mm。促动器调整量为3 mm,其误差仅在10-11 mm内,满足精度要求。
37.8)通过该仿真实例,可以看出本发明采用的方法能够实现大型反射面天线主动调整的仿真分析,可用于天线结构设计阶段主动调整的促动器分布优化设计,解决反射面形面精度不足的问题,提升整体天线的电性能效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1