一种脱密方法、装置及存储介质
1.本发明属于数据处理技术领域,尤其涉及一种脱密方法、装置及存储介质。
背景技术:
2.目前,在现有的探地雷达设备的数据传输中,是将探地雷达设备所采集到的所有数据以明确的标识进行存储,并存储在同一个数据文件中。若发生数据泄露或者丢失则会将所有的数据进行丢失,数据的安全性得不到保障。且很有可能落入到无接触权限的人员手中,给国家安全造成潜在或实际的重大损失。
技术实现要素:
3.本发明提供一种脱密方法、装置及存储介质,用以解决相关技术中由于将所有数据以明确的标识存储于同一个数据文件中,所导致的数据安全性差的问题。
4.一方面本发明提供一种脱密方法,方法包括:
5.通过第一处理器接收当前时刻采集到的雷达设备的轨迹数据与定位数据;
6.通过所述第一处理器对所述轨迹数据进行解码处理,得到解码数据;
7.基于所述第一处理器根据所述解码数据对所述定位数据进行处理,得到定位存储数据;
8.基于所述第一处理器将所述定位存储数据发送给第一存储终端,以将所述定位存储数据存储于所述第一存储终端中。
9.进一步地,所述通过所述第一处理器对所述轨迹数据进行解码处理,得到解码数据,包括:
10.通过所述第一处理器获取所述轨迹数据中的角度数据;
11.通过所述第一处理器对所述角度数据进行解码处理,得到解码数据。
12.进一步地,所述通过所述第一处理器对所述角度数据进行解码处理,得到解码数据,包括:
13.通过所述第一处理器根据以下公式对所述角度数据进行解码处理,得到解码数据:
14.n=360/θ
′
min*θ
′
/360;
15.b=360/θ2min*θ2/360;
16.其中,θ
′
为前进转动角度,θ2为后退转动角度,θ
′
min为正转最小可分辨角度,θ2min为反转最小可分辨角度,n为正转最小可分辨角度的数量,b为反转最小可分辨角度的数量;所述角度数据包括前进转动角度、后退转动角度、正转最小可分辨角度与反转最小可分辨角度;所述解码数据包括正转最小可分辨角度的数量与反转最小可分辨角度的数量。
17.进一步地,所述基于所述第一处理器根据所述解码数据对所述定位数据进行处理,得到定位存储数据,包括:
18.基于所述第一处理器根据所述解码数据对所述定位数据进行加密处理,得到第一
加密数据;
19.基于所述第一处理器将所述解码数据关联至所述第一加密数据,得到所述定位存储数据。
20.进一步地,所述方法还包括:
21.通过所述第一处理器接收当前时刻采集到的所述雷达设备的图像数据;
22.通过所述第一处理器根据所述解码数据对所述图像数据进行处理,得到图像存储数据;
23.基于所述第一处理器将所述图像存储数据发送给第二存储终端,以将所述图像存储数据存储于所述第二存储终端中。
24.进一步地,所述通过所述第一处理器根据所述解码数据对所述图像数据进行处理,得到图像存储数据,包括:
25.通过所述第一处理器根据所述解码数据对所述图像数据进行加密处理,得到第二加密数据;
26.通过所述第一处理器将所述解码数据关联至所述第二加密数据,得到所述图像存储数据。
27.进一步地,所述方法还包括:
28.通过第二处理器接收当前时刻所述雷达设备的采集到的探测数据;
29.通过所述第二处理器接收所述第一处理器传输的所述解码数据,所述第二处理器根据所述解码数据对所述探测数据进行处理,得到探测存储数据;
30.通过所述第二处理器将所述探测存储数据发送给第三存储终端,以通过所述第三存储终端对所述探测存储数据进行存储。
31.进一步地,所述通过所述第二处理器接收所述第一处理器传输的所述解码数据,所述第二处理器根据所述解码数据对所述探测数据进行处理,得到探测存储数据,包括:
32.通过所述第二处理器根据所述解码数据对所述探测数据进行加密处理,得到第三加密数据;
33.通过所述第二处理器将所述解码数据关联至所述第三加密数据,得到所述探测存储数据。
34.第二方面,本发明提供一种脱密装置,检测装置包括:
35.采集设备,包括gps接收机、摄像机与雷达探测设备,所述gps接收机用于采集当前时刻的轨迹数据,所述摄像机用于采集当前时刻的定位数据,所述雷达探测设备用于采集当前时刻的图像数据与探测数据;
36.第一处理器,用于对轨迹数据进行解码处理,得到解码数据;并根据所述解码数据分别对所述定位数据与所述图像数据进行处理,得到定位存储数据与图像存储数据;
37.第二处理器,用于根据所述解码数据对所述探测数据进行处理,得到探测存储数据;
38.存储设备,包括第一存储终端、第二存储终端与第三存储终端,所述第一存储终端用于存储定位存储数据,所述第二存储终端用于存储图像存储数据,所述第三存储终端用于存储探测存储数据。
39.第三方面,本发明提供一种可读存储介质,其上存储有计算机程序,包括:计算机
程序被处理器执行时,实现第一方面脱密方法中的各个步骤。
40.从上述本发明实施例可知,本发明实施例通过第一处理器对定位数据进行处理,再将处理后的定位数据存储于第一存储单元中;并且,通过轨距数据对定位数据进行处理后存储,没有明确的标识所有数据,降低了数据泄露或丢失后被破译的风险,有效保证了数据的安全性。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
42.图1为本技术实施例一中脱密方法的流程示意图;
43.图2为本技术实施例二中脱密方法的流程示意图;
44.图3为本技术实施例三中脱密方法的流程示意图;
45.图4为本技术实施例四中脱密装置的模块示意图。
具体实施方式
46.为使得本发明的发明目的、特征、优点能够更加的明显和易懂,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而非全部实施例。基于本发明中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
47.实施例一
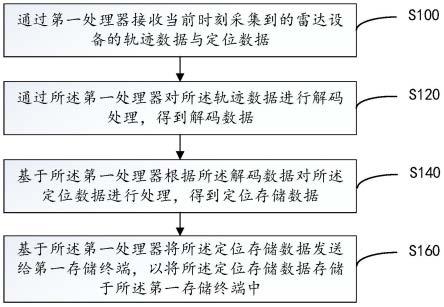
48.参阅图1,示出了本发明实施例一的一种脱密方法的流程示意图,应用于探测雷达上,所述脱密方法包括:
49.步骤s100、通过第一处理器接收当前时刻采集到的雷达设备的轨迹数据与定位数据。
50.本实施例中,轨迹数据通过角度传感器采集得到,定位数据通过gps接收机采集到,其中,角度传感器安装在雷达设备的转轮上,gps接收机安装在雷达设备上,且gps接收机的采集端面向地面。第一处理器同时发送控制信号给gps接收机与角度传感器,以控制gps接收机与角度传感器同时进行数据采集;也可通过外接的控制器同时发送控制信号给gps接收机与角度传感器,以控制gps接收机与角度传感器同时进行数据采集。同时采集轨迹数据与定位数据,实现对数据的同步处理。
51.步骤s120、通过所述第一处理器对所述轨迹数据进行解码处理,得到解码数据。
52.本实施例中,通过对轨迹数据进行解码处理,以便后续对解码数据的应用,将角度传感器采集到的轨迹数据与定位数据进行关联。
53.在示例性地实施例中,为了进一步进行数据处理,所述步骤s120包括:
54.通过所述第一处理器获取所述轨迹数据中的角度数据;通过所述第一处理器对所述角度数据进行解码处理,得到解码数据。
55.在示例性地实施例中,所述步骤s120还包括:
56.通过所述第一处理器根据以下公式对所述角度数据进行解码处理,得到解码数据:
57.n=360/θ
′
min*θ
′
/360;
58.b=360/θ2min*θ2/360;
59.其中,θ
′
为前进转动角度,θ2为后退转动角度,θ
′
min为正转最小可分辨角度,θ2min为反转最小可分辨角度,n为正转最小可分辨角度的数量,b为反转最小可分辨角度的数量;所述角度数据包括前进转动角度、后退转动角度、正转最小可分辨角度与反转最小可分辨角度;所述解码数据包括正转最小可分辨角度的数量与反转最小可分辨角度的数量。θ
′
与θ2根据角度传感器的测量得到,θ
′
min与θ2min在角度传感器的型号上可提供。
60.本实施例中,根据角度数据还可计算出实际移动距离s0,具体的计算公式如下:
[0061][0062]
其中,φ为探测雷达的车轮的直径,s0为实际移动距离,θ
′
min为正转最小可分辨角度,θ2min为反转最小可分辨角度。
[0063]
在计算过程中实际移动距离可能会发生偏差,通过距离分辨精度sd可确定实际移动距离的范围[(s
0-sd),(s0+sd)],其中,距离分辨精度sd的计算公式如下:
[0064][0065]
由此可推导出最终移动距离s的计算公式为:
[0066][0067]
步骤s140、基于所述第一处理器根据所述解码数据对所述定位数据进行处理,得到定位存储数据。
[0068]
本实施例中,将解码数据与定位数据进行关联,解码数据为上式中的n和b,得到定位存储数据,以便于后续的数据查询。
[0069]
定位数据以行为单位,数据格式如下:
[0070]
$信息类型,x,x,x,x,x,x,x,x,x,x,x,x,x
[0071]
信息类型可以为:全球定位信息。
[0072]
在示例性地实施例中,所述步骤s140包括:
[0073]
基于所述第一处理器根据所述解码数据对所述定位数据进行加密处理,得到第一加密数据;基于所述第一处理器将所述解码数据关联至所述第一加密数据,得到所述定位存储数据。
[0074]
本实施例中,第一处理器可以直接将定位数据与解码数据进行关联,得到定位存储数据;为了提高定位数据的安全性,也可以通过解码数据对定位数据进行加密,加密的方式不限于对称加密等,得到第一加密数据,再将第一加密数据与解码数据进行关联。
[0075]
步骤s160、基于所述第一处理器将所述定位存储数据发送给第一存储终端,以将所述定位存储数据存储于所述第一存储终端中。
[0076]
本实施例中,为了更好的进行数据存储,可以根据当前时刻对应的时间对定位存储数据进行存储,以提高数据查询的效率。为了将定位数据存储到对应的第一存储终端内,第一处理器可以获取定位数据的数据格式,根据数据格式查询对应第一存储终端的标识码,再根据第一存储终端的标识码将定位存储数据发送给第一存储终端进行存储,不存储
于第一处理器本来的存储单元内,实现数据的保护。第一存储终端不限于计算机设备、移动终端等,发送的方式不限于无线通讯网络。
[0077]
实施例二
[0078]
参阅图2,示出了本发明实施例二的一种脱密方法的流程示意图,所述脱密方法包括:
[0079]
步骤s200、通过所述第一处理器接收当前时刻采集到的所述雷达设备的图像数据、轨迹数据与定位数据。
[0080]
本实施例中,图像数据通过摄像机采集,轨迹数据通过角度传感器采集,定位数据通过gps接收机采集,通过第一处理器同时发送控制信号给摄像机、角度传感器与gps接收机,以控制摄像机、角度传感器与gps接收机同时进行数据采集,从而使得采集的图像数据、轨迹数据与定位数据在时间上同步,进而实现数据的实时采集。
[0081]
步骤s220、通过所述第一处理器对所述轨迹数据进行解码处理,得到解码数据。
[0082]
本实施例中,通过对轨迹数据进行解码处理,以便后续对解码数据的应用,将角度传感器采集到的轨迹数据与定位数据进行关联。
[0083]
在示例性地实施例中,为了进一步进行数据处理,所述步骤s220包括:
[0084]
通过所述第一处理器获取所述轨迹数据中的角度数据;通过所述第一处理器对所述角度数据进行解码处理,得到解码数据。
[0085]
在示例性地实施例中,所述步骤s220还包括:
[0086]
通过所述第一处理器根据以下公式对所述角度数据进行解码处理,得到解码数据:
[0087]
n=360/θ
′
min*θ
′
/360;
[0088]
b=360/θ2min*θ2/360;
[0089]
其中,θ
′
为前进转动角度,θ2为后退转动角度,θ
′
min为正转最小可分辨角度,θ2min为反转最小可分辨角度,n为正转最小可分辨角度的数量,b为反转最小可分辨角度的数量;所述角度数据包括前进转动角度、后退转动角度、正转最小可分辨角度与反转最小可分辨角度;所述解码数据包括正转最小可分辨角度的数量与反转最小可分辨角度的数量。θ
′
与θ2根据角度传感器的测量得到,θ
′
min与θ2min在角度传感器的型号上可提供。
[0090]
步骤s240、基于所述第一处理器根据所述解码数据对所述定位数据进行处理,得到定位存储数据;并通过所述第一处理器根据所述解码数据对所述图像数据进行处理,得到图像存储数据。
[0091]
本实施例中,是将收集到的定位数据与图像数据均通过解码数据进行处理后,再分别存储于不同的存储终端内。因此,第一处理器对于图像数据的处理与第一处理器对于定位数据的处理方式相同,方便后续对数据的查询,不需要再做额外的其他处理。
[0092]
在示例性地实施例中,所述步骤s240还包括:
[0093]
通过所述第一处理器根据所述解码数据对所述图像数据进行加密处理,得到第二加密数据;通过所述第一处理器将所述解码数据关联至所述第二加密数据,得到所述图像存储数据。
[0094]
步骤s260、基于所述第一处理器将所述定位存储数据发送给第一存储终端,以将所述定位存储数据存储于所述第一存储终端中;并基于所述第一处理器将所述图像存储数
据发送给第二存储终端,以将所述图像存储数据存储于所述第二存储终端中。
[0095]
本实施例中,为了更好的进行数据存储,可以根据当前时刻对应的时间对定位存储数据与图像存储数据进行存储,以提高数据查询的效率。为了将定位数据与图像处理存储到对应的存储终端内,第一处理器可以获取定位数据的数据格式以及图像处理的数据格式,根据数据格式查询对应的存储终端的标识码,再根据标识码将定位存储数据与图像存储数据分别发送给对应的存储终端进行存储,即,定位存储数据发送给第一存储终端,图像存储数据发送给第二存储终端,将数据分开存储,不存储于第一处理器本来的存储单元内,实现数据的脱密。第一存储终端与第二存储终端不限于计算机设备、移动终端等,发送的方式不限于无线通讯网络。
[0096]
实施例三
[0097]
参阅图3,示出了本发明实施例三的一种脱密方法的流程示意图,所述方法包括:
[0098]
步骤s300、通过第一处理器接收当前时刻所述雷达设备的图像数据、轨迹数据与定位数据以及通过第二处理器接收当前时刻所述雷达设备的采集到的探测数据。
[0099]
本实施例中,图像数据通过摄像机采集,轨迹数据通过角度传感器采集,定位数据通过gps接收机采集,探测数据通过雷达设备上的雷达探测设备采集,通过第一处理器同时发送控制信号给摄像机、角度传感器、gps接收机与雷达探测设备,以控制摄像机、角度传感器、gps接收机与雷达探测设备同时进行数据采集,从而使得采集的图像数据、轨迹数据、定位数据与探测数据在时间上同步,进而实现数据的实时采集。
[0100]
步骤s320、通过所述第一处理器对所述轨迹数据进行解码处理,得到解码数据。
[0101]
本实施例中,通过对轨迹数据进行解码处理,以便后续对解码数据的应用,将角度传感器采集到的轨迹数据与定位数据进行关联。
[0102]
在示例性地实施例中,为了进一步进行数据处理,所述步骤s320包括:
[0103]
通过所述第一处理器获取所述轨迹数据中的角度数据;通过所述第一处理器对所述角度数据进行解码处理,得到解码数据。
[0104]
在示例性地实施例中,所述步骤s320还包括:
[0105]
通过所述第一处理器根据以下公式对所述角度数据进行解码处理,得到解码数据:
[0106]
n=360/θ
′
min*θ
′
/360;
[0107]
b=360/θ2min*θ2/360;
[0108]
其中,θ
′
为前进转动角度,θ2为后退转动角度,θ
′
min为正转最小可分辨角度,θ2min为反转最小可分辨角度,n为正转最小可分辨角度的数量,b为反转最小可分辨角度的数量;所述角度数据包括前进转动角度、后退转动角度、正转最小可分辨角度与反转最小可分辨角度;所述解码数据包括正转最小可分辨角度的数量与反转最小可分辨角度的数量。θ
′
与θ2根据角度传感器的测量得到,θ
′
min与θ2min在角度传感器的型号上可提供。
[0109]
步骤s340、基于所述第一处理器根据所述解码数据对所述定位数据进行处理,得到定位存储数据;并通过所述第一处理器根据所述解码数据对所述图像数据进行处理,得到图像存储数据;并通过所述第二处理器接收所述第一处理器传输的所述解码数据,所述第二处理器根据所述解码数据对所述探测数据进行处理,得到探测存储数据。
[0110]
本实施例中,是将收集到的定位数据、图像数据与探测数据均通过解码数据进行
处理后,再分别存储于不同的存储终端内。因此,第一处理器对于图像数据的处理方式、对于定位数据的处理方式以及对于探测数据的处理方式均相同,方便后续对数据的查询,不需要再做额外的其他处理。
[0111]
在示例性地实施例中,所述步骤s340包括:
[0112]
通过所述第二处理器根据所述解码数据对所述探测数据进行加密处理,得到第三加密数据;通过所述第二处理器将所述解码数据关联至所述第三加密数据,得到所述探测存储数据。
[0113]
步骤s360、基于所述第一处理器将所述定位存储数据发送给第一存储终端,以将所述定位存储数据存储于所述第一存储终端中;并基于所述第一处理器将所述图像存储数据发送给第二存储终端,以将所述图像存储数据存储于所述第二存储终端中;并通过所述第二处理器将所述探测存储数据发送给第三存储终端,以通过所述第三存储终端对所述探测存储数据进行存储。
[0114]
本实施例中,为了更好的进行数据存储,可以根据当前时刻对应的时间对定位存储数据、图像存储数据与探测存储数据进行存储,以提高数据查询的效率。为了将定位存储数据、图像存储数据与探测存储数据到对应的存储终端内,第一处理器可以获取定位数据的数据格式、图像处理的数据格式以及探测数据的数据格式,根据数据格式查询对应的存储终端的标识码,再根据标识码将定位存储数据、图像存储数据与探测存储数据分别发送给对应的存储终端进行存储,即,定位存储数据发送给第一存储终端,图像存储数据发送给第二存储终端,探测存储数据发送给第三存储终端。将各个形成保密数据的图像数据、定位数据以及探测数据分开存储,不存储于第一处理器本来的存储单元内,实现数据的脱密。第一存储终端、第二存储终端与第三存储终端不限于计算机设备、移动终端等,发送的方式不限于无线通讯网络。
[0115]
实施例四
[0116]
参阅图4,本发明实施例提供了一种脱密装置,所述脱密装置包括:
[0117]
采集设备,包括gps接收机401、摄像机402与雷达探测设备407,所述gps接收机401用于采集当前时刻的轨迹数据,所述摄像机402用于采集当前时刻的定位数据,所述雷达探测设备407用于采集当前时刻的图像数据与探测数据,雷达探测设备407优选为雷达探测头。
[0118]
本实施例中,gps接收机401、摄像机402与雷达探测设备407同时接收到控制信号,gps接收机401、摄像机402与雷达探测设备407根据该控制信号同时进行数据采集,从而实现数据的实时采集。
[0119]
本实施例中,由于摄像机402与gps接收机401采集的都是位置数据,即摄像机402采集的是当前时刻的地面的图片,gps接收机401采集的当前时刻雷达的位置数据,即当前地面与探测雷达的距离;将定位数据与图像数据可用同一个处理器进行处理。而,探测数据是雷达信号,需要进行处理的步骤更加繁琐,可单独设置一个处理器进行处理。此外,也可为定位数据与图像数据都设置一个处理器,通过同一个处理器进行处理提高了数据处理的效率。
[0120]
本实施例中,第一处理器400与第二处理器406之间存在信息交互,当第一处理器400发送控制信号给摄像机402与gps接收机401以使摄像机402与gps接收机401根据该控制
信号进行数据采集时,同时也给第二处理器406相应的信号告知第二处理器406发送控制信号给雷达探测设备407,以使雷达探测设备407根据第二处理器406发送的控制信号进行数据采集。也可以是第二处理器406给第一处理器400相应的信号告知第一处理器400发送进行数据采集的控制信号。
[0121]
本实施例中,也可通过外部的控制器,同时给摄像机402、gps接收机401与雷达探测设备407发送控制信号,以使摄像机402、gps接收机401与雷达探测设备407根据外部的控制器发送的控制信号同时进行数据采集。
[0122]
第一处理器400,用于对轨迹数据进行解码处理,得到解码数据;并根据所述解码数据分别对所述定位数据与所述图像数据进行处理,得到定位存储数据与图像存储数据。
[0123]
本实施例中,第一处理器400首先对轨迹数据进行解码处理,得到解码数据,再可通过第一处理器400的运算单元根据解码数据同时对定位数据与图像数据进行处理,处理的方式可以为将解码数据关联至定位数据与图像数据上,或者通过解码数据分别对定位数据与图像数据进行加密处理,定位数据与图像数据的加密方式相同,再将解码数据关联至加密后的定位数据与加密后的图像数据上,得到定位存储数据与图像存储数据。
[0124]
第二处理器406,用于根据所述解码数据对所述探测数据进行处理,得到探测存储数据。
[0125]
本实施例中,第二处理器406接收从第一处理器400发送的解码数据,第一处理器400得到解码数据后立即发送给第二处理器406,使第二处理器406根据解码数据对探测数据进行处理,处理的方式可以为将解码数据关联至探测数据上,或者通过解码数据对定探测数据进行加密处理,加密的方式与定位数据与图像数据的加密方式一致,再将解码数据关联至加密后的探测数据上,得到探测存储数据。
[0126]
存储设备,包括第一存储终端404、第二存储终端405与第三存储终端408,所述第一存储终端404用于存储定位存储数据,所述第二存储终端405用于存储图像存储数据,所述第三存储终端408用于存储探测存储数据。
[0127]
本实施例中,第一存储终端404、第二存储终端405与第三存储终端408分别为三个不同的移动终端,将定位存储数据、图像存储数据、探测存储数据分别存储到不同的移动终端上,实现数据的独立,若存储的数据被泄露,由于数据的单独存储,极大的保证了安全性。
[0128]
本实施例中,通过将角度传感器403采集到的轨迹数据进行解码处理后,得到解码数据,再将解码数据分别对定位数据、图像数据以及探测数据进行关联处理,保证了数据在时间上的一致性,再分别存储于不同的存储终端内,实现了定位数据、图像数据以及探测数据的数据脱密,提高了数据的独立性和安全性。
[0129]
本发明还提供一种存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现方法实施例提供的任务执行脱密方法中的各个步骤。
[0130]
以上为对本发明所提供的任务执行程序的脱密方法、装置及存储介质的描述,对于本领域的技术人员,依据本发明实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1