用于验证的设备、尤其是计算机实现的方法与流程
用于验证的设备、尤其是计算机实现的方法
现有技术
1.人工神经网络可用作逼近描述机器中物理和/或化学关系的函数的模型。然而,这样的模型在安全关键应用中的使用受到限制,因为无法完全预见人工神经网络的输出有多安全。
技术实现要素:
2.通过根据独立权利要求的方法、设备和计算机程序在输入空间内对人工神经网络进行统计评估。
3.尤其用于验证尤其人工神经网络的尤其计算机实现的方法,所述人工神经网络被训练用于将函数、尤其是有限函数或利普希茨连续函数的输入空间的输入点尽可能精确地映射到所述函数的函数值上,规定:预给定测试点,其中,所述测试点包括以下一对:所述函数的输入空间中的测试输入点和测试函数值,其中,从所述输入空间确定所述输入点,其中,将所述输入点借助所述人工神经网络映射到所述函数值上,其中,借助所述测试输入点确定所述函数值的参考,其中,确定所述函数值与所述参考的偏差,并且根据所述偏差确定所述人工神经网络的易错性度量。测试点代表已知的、尤其所测量的数据点。输入点代表受测试的数据点。参考代表所期望的或可预期的结果与所不期望的或不可预期的结果之间的边界。所述度量对人工神经网络的可靠性做出了统计上可靠的陈述。所述度量说明使用人工神经网络来逼近函数的机器的易错性。
4.为了提高机器的运行可靠性,可以规定,所述函数描述机器中的尤其物理或化学参量的变化曲线,其中,所述参量在所述变化曲线中的变化受所述机器的尤其物理和/或化学特性和/或所述机器的部件的尤其物理和/或化学特性限制,其中当所述易错性度量小于阈值时,根据所述函数值控制所述机器或所述部件,否则不根据所述函数值控制所述机器或所述部件。
5.为了提高机器的运行可靠性,可以规定,所述函数描述机器中的尤其物理或化学参量的变化曲线,其中,所述参量在所述变化曲线中的变化受所述机器的尤其物理和/或化学特性和/或所述机器的部件的尤其物理和/或化学特性限制,其中当所述易错性度量小于阈值时,将所述人工神经网络转移到机器中,否则不转移所述人工神经网络。
6.优选地,根据所述测试输入点或相对于所述测试输入点、尤其在所述测试输入点周围确定所述输入空间中的输入点,其中,在这些输入点中确定是由人工神经网络映射到其偏差不满足条件的函数值的输入点的概率,其中,当确定所述偏差小于阈值时,或者当确定所述偏差大于阈值时,或者当确定所述偏差在上限和下限内时,所述偏差满足所述条件。由此对输入空间中的输入点进行统计测试。
7.优选地,在周围中,尤其根据概率分布抽取、尤其是随机抽取和/或在周围均匀分布地抽取所述输入空间的输入点。由此改善了统计测试的说服力。
8.可以规定,在所述输入空间中从不同的测试点确定测试输入点的包括所述测试输入点的分布,所述测试点将所述输入空间划分成区域、尤其是相互邻接的单形体或者尤其
是相互邻接的球体,其中,这些区域分别包括至少一个测试输入点,其中,对于每个测试点设置以下一对:所述函数的输入空间中的测试输入点和所述函数的测试函数值,其中,在所述区域之一中确定所述输入点,其中,借助至少一个测试点中的测试输入点确定所述参考,在其中确定所述输入点的区域包括所述测试输入点,其中,对于所述区域确定所述度量。由此,如果所述偏差满足条件,则在所述区域中验证人工神经网络。否则至少在所述区域中不验证人工神经网络。
9.优选地,所述单形体对于单形体的每个角部包括所述测试输入点之一。优选地,所述球体在其中心点处包括所述测试输入点中的各一个测试输入点。由此,实现这些测试点的尽可能整个凸包络的尽可能好的统计覆盖。
10.可以规定,确定所述输入空间中的多个输入点,所述多个输入点在所述输入空间中位于所述区域之一中,其中,对于所述多个输入点中的每个输入点,所述方法包括将所述输入点借助所述人工神经网络映射到函数值上以及确定所述函数值与所述参考的偏差,并且其中,根据如此对于所述多个输入点确定的偏差确定所述度量。由此,对人工神经网络在所测量的整个输入空间上进行定量评估。该评估在此是通过在给定输入空间中某个点的网络得出与真实函数值有很大偏差的结果的概率进行。
11.可以规定,确定所述输入空间中的多个输入点,所述多个输入点在所述输入空间中位于所述区域中的不同区域中,其中,对于所述区域中的不同区域中的每个区域,所述方法包括:将该区域中的输入点借助所述人工神经网络映射到函数值上;借助至少一个测试点中的测试输入点确定所述函数值的参考,所述区域包括所述测试输入点;确定该函数值与该参考的偏差;并且其中,根据以下频率确定所述度量:如此确定的偏差以所述频率满足其相应的区域的条件。所述频率量化了将输入空间中的输入点映射到位于所期望的值范围内的函数值上的概率。由此可以特别好地估计易错性。
12.可以规定,根据所述输入点和所述测试输入点之间的差确定所述参考,其中,所述差是以所述函数的利普希茨常数加权的。
13.一种用于验证人工神经网络的设备,所述人工神经网络被训练用于将函数、尤其是有限函数或利普希茨连续函数的输入空间中的输入点尽可能精确地映射到所述函数的函数值上,该设备被构造用于执行所述方法。同样提供了一种包括计算机可读指令的计算机程序,该计算机可读指令在由计算机执行时运行该方法。
附图说明
14.另外的有利的实施方式由以下描述和附图得出。在附图中,图1示出一种用于验证人工神经网络的设备的一部分的示意图,图2示出一种用于验证的方法中的步骤,图3示出函数的输入空间的示意图,图4示出该函数的函数值范围的示意图。
具体实施方式
15.在图1中示意性地示出用于验证人工神经网络102的设备100。
16.设备100包括至少一个处理器和至少一个存储器,所述至少一个处理器和至少一
个存储器被构造用于执行计算机程序。计算机程序包括计算机可读指令,在其由计算机执行时,运行以下描述的方法。
17.人工神经网络102被训练用于将函数、尤其是有限函数或利普希茨连续函数的输入空间106中的输入点104尽可能精确地映射到所述函数的函数值108上。输入点104和/或函数值108可以是多维参量。该函数不一定必须是利普希茨连续的。在以下描述中,从有限函数出发,从而对于从输入空间106确定、尤其抽取的每个输入点104可确定上限和/或下限。利普希茨连续函数是有限函数的一个特例。
18.通常,使用说明上限和下限的函数。在该示例中,以以下方式构建该函数:即该函数包括关于要借助该函数建模的技术系统的假设和/或基本知识。示例性地,构建一个k-近邻函数或线性内插,其对于函数的输入点给出了精确值。
19.也可以规定,通过有限元方法模型来定义函数,该模型在输入点输出精确值。上限和/或下限例如由相对于精确值的可容忍偏移来定义。该偏移例如通过加法或乘法添加到该值上和/或从该值中减去。
20.在该示例中,该函数描述了机器110中尤其物理或化学参量的变化曲线。在该示例中,所述参量在所述变化曲线中的变化受所述机器110的尤其物理和/或化学特性和/或所述机器110的部件的尤其物理和/或化学特性限制。
21.机器110的一个可能的应用示例是马达控制。在测量马达中的压力变化曲线上的燃料喷射时间时,压力变化曲线受到马达中发生的物理学的限制,由此,人工神经网络102的容许预测同样受限制。因此,对神经网络102的预测进行统计评估是可能的。
22.在该示例中,设备100被构造用于确定人工神经网络102的易错性的度量。在该示例中,设置了人工神经网络102用于逼近该函数。根据度量例如可能的是,以人工神经网络102逼近函数以确定输入点104的函数值108,或者不以人工神经网络逼近。在安全关键的产品中,此度量可以用于提高运行可靠性。在该示例中,该度量量化了人工神经网络102在整个输入空间上或输入空间的一个区域中的品质。
23.机器110可以例如完成自动驾驶或驾驶员辅助系统领域中的任务。
24.设备100可以构造用于控制或调节机器110。
25.设备100例如被构造用于利用传感器114检测在机器110上或机器110的部件上的信号112。在该示例中,设备100被构造用于根据信号114确定输入点104,即实际输入点。也可以通过数学运算从信号中确定输入点104。也可以根据从多个传感器检测的信号来确定输入点104。在该示例中,机器110或其部件被构造用于借助函数值108来控制。例如,设备100被构造用于根据函数值108、也即额定函数值输出致动器118的额定值116。设备100可以被构造用于根据函数值108确定不同致动器的多个额定值。
26.图2中示出用于验证人工神经网络102的方法、尤其是计算机实现的方法的步骤。
27.人工神经网络102被训练用于将输入空间106中的某位置处的输入点104尽可能精确地映射到函数在该位置处具有的函数值108上。
28.在该示例中,人工神经网络102以训练点进行训练。在该示例中,对于每个训练点设置以下一对:在函数的输入空间106的某位置处的训练输入点和函数在该位置处的训练函数值。例如,测量该对。该方法本身可以包括训练点的检测。也可以在执行该方法之前检测训练点。该方法本身可以包括在下述步骤之前执行的训练。
29.在步骤202中,设置至少一个测试点。该至少一个测试点包括以下一对:所述函数的输入空间106中的测试输入点和所述函数的测试函数值。在该示例中,对于每个测试点设置以下一对:在函数的输入空间106的某位置处的测试输入点和函数在该位置处的测试函数值。例如,测量该对。该方法本身可以包括测试点的检测。也可以在执行该方法之前检测测试点。
30.可以规定,在输入空间中从不同的测试点确定测试输入点的包括所述测试输入点的分布,所述测试点将所述输入空间划分成区域。
31.在该示例中,这些区域分别包括至少一个测试输入点。
32.在一个示例中,这些区域尤其是彼此邻接的单形体。例如,单形体对于单形体的每个角部包括测试输入点之一。
33.在一个示例中,这些区域尤其是彼此相邻的球体。例如,所述球体在其中心点处包括所述测试输入点中的各一个测试输入点。
34.然后执行步骤204。
35.在步骤204中,根据所述测试输入点或相对于所述测试输入点确定所述输入空间106中的输入点。优选地,在所述测试输入点周围确定所述输入点。根据测试输入点例如通过相对于测试输入点的距离度量确定周围。在该示例中,从输入空间106在周围尤其根据概率分布抽取、尤其是随机抽取该输入点。可以规定,在两个或更多个测试输入点之间内插该输入点。在该示例中,在这些测试输入点之间内插这些输入点。优选地,在测试输入点的周围,通过相对于测试输入点的距离度量确定输入空间106中的输入点。
36.然后执行步骤206。
37.在步骤206中,借助人工神经网络将输入点映射到函数值上。
38.然后执行步骤208。
39.在步骤208中,借助所述测试输入点确定所述函数值的参考。
40.例如,利用至少一个测试点中的测试输入点确定参考,在其中确定输入点的区域包括该测试输入点。
41.在该示例中,根据所述输入点和所述测试输入点之间的差确定所述参考,其中,所述差是以所述函数的利普希茨常数l加权的。
42.然后执行步骤210。
43.在步骤210中,确定函数值与参考的偏差。
44.在一个示例中,针对输入空间中的多个输入点执行步骤204到210。
45.在一个示例中,在输入空间上均匀分布地抽取多个输入点。
46.在一个示例中,确定所述输入空间中的多个输入点,所述多个输入点在所述输入空间中位于所述区域之一中。可以规定,尤其是从该区域随机抽取和/或均匀分布地抽取所述输入点。
47.在一个示例中,确定所述输入空间中的多个输入点,所述多个输入点在所述输入空间中位于所述区域中的不同区域中。可以规定,从所述区域中的相应区域中随机抽取和/或均匀分布地抽取所述多个输入点。
48.例如,对于每个区域,借助至少一个测试点中的该区域所包括的测试输入点确定参考。例如,对于每个区域规定,借助人工神经网络102将该区域中的输入点映射到函数值
上,借助至少一个测试点中的该区域所包括的测试输入点确定所述函数值的参考,以及确定该函数值与该参考的偏差。
49.然后执行步骤212。
50.在步骤212中,根据所述偏差确定所述人工神经网络102的易错性度量。
51.在该示例中,根据对于多个输入点确定的偏差来确定度量。
52.可以规定,对于所述区域确定度量。该度量说明人工神经网络102在整个输入空间中的易错性。
53.可以规定,对于单个区域确定所述度量。所述度量说明人工神经网络102在输入空间的受限于该区域的部分中的易错性。
54.可以规定,对于不同的区域单独地确定该度量。该度量说明人工神经网络102在输入空间的由这些区域限制的部分中的易错性。
55.例如,根据以下频率确定所述度量:如此确定的偏差以所述频率满足其相应的区域的条件。
56.在一个示例中,在被确定度量的这些输入点中确定是由人工神经网络102映射到其偏差不满足条件的函数值的输入点的概率。在该示例中,根据该频率确定该概率。
57.例如,如果确定偏差小于阈值,则偏差满足条件。
58.例如,如果确定偏差大于阈值,则偏差满足条件。
59.例如,如果确定偏差在上限和下限内,则偏差满足条件。
60.该度量提供关于人工神经网络102的预测能力的定量陈述。这在下面将针对单形体来描述。
61.借助测试点将输入空间划分为单形体,所述单形体通过测试点来展开。其示例在图3中对于第一单形体302、第二单形体304和第三单形体306示意性地示出。在第一单形体302中,所抽取的输入点308作为点示意性地示出。单形体的角部通过测试点310来构成。测试点310代表例如在系统上、例如机器110上已测量的数据点。
62.在假设所测量的数据点之间的实际系统响应实际上没有急剧跳跃的情况下,函数值与单形体顶点处的函数值的最大偏差是有限的。
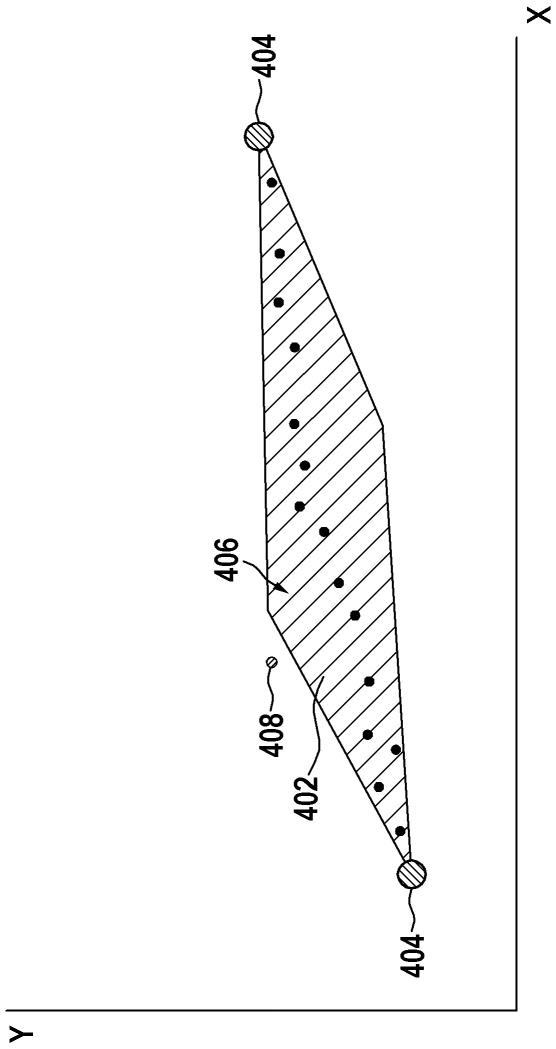
63.这在图4中对于在两个测试点404之间延伸的范围402示意性地示出。在范围402中布置有函数值406,输入点由人工神经网络102映射到所述函数值上。这些输入点在图4中示意性地示为点。在这种情况下,易错性度量说明输入点被映射到位于范围402之外的函数值的概率有多大。图4中的点408示例性地表示位于范围402之外的函数值。
64.范围402的周边表示人工神经网络102对函数值的预测的上限和下限。代替范围402,也可以设置上限和下限或阈值,例如对于相应的输入点与测试点404之一之间的间距以利普希茨常数l加权。
65.借助该方法检查,对于随机抽取的输入点,人工神经网络102的预测是否提供错误的预测。
66.在该示例中,是逼近物理过程的人工神经网络102。下面,g表示要建模的过程的真实、基本真实的行为和(其中,)表示n个测试点,在所述测试点上确定人工神经网络102的性能。人工神经网络102被训练使得尽可能准确地适用:。在该示例中,物理过程g是以利普希茨常数l进行利普
希茨连续的,使得两个任意的测试数据点之间的真实函数值始终是有限的。这在下面对于由两个测试点展开的一维单形体来描述:对此适用:这意味着,的真实函数值对于单形体内的所有点都是已知的。
67.对于在输入空间中非常密地测量的测试点可以规定,假设输入空间的局部线性。在这种情况下将以下假设为已知的:其中,并且。
68.对此的零假设h0是,人工神经网络102预测范围402内的所有函数值:其中是通过单形体来展开的输入空间,其中是单形体的顶点,其中是要检查的概率。
69.为了进行应用,零假设h0的补集h1被限制在的确定的按比例的参量的子集s上。借助如此限制的假设h1',对于概率,例如预期函数值的以下二项式分布b:其中,如果在随机抽取的点中没有预测的函数值位于范围402之外,则,其中,n是单形体中随机抽取的输入点的数目,并且α是预先确定的显著性水平。
70.所述概率随着所测试的输入点的数目n的增加而降低。对于给定的显著性水平α,可以增加数目n,直到达到显著性水平α。
71.替代地,在数目n固定的情况下,可以缩小概率直到达到显著性水平α。由此找到最小概率,在n个具有显著性水平α的随机数的情况下可以排除所述概率。
72.在该示例中,针对相互邻接的单形体单独执行该过程。因此实现了测试点的整个凸包络的统计覆盖。因此可以验证所测量的整个输入空间。
73.不同的单形体中的统计测试最终可以汇总为一个总数,即易错性的度量。
74.在一个示例中,在数目n固定的情况下,该度量被确定为所求取的最大概率。这是一个保守的选择。
75.在一个示例中,对于单个单形体的结果确定度量。例如,对于单形体中的不同单形体确定多个度量。由此,在输入空间的不同范围中进行评估。
76.通过该度量验证零假设h0,其方式是,渐近地证伪补集h1。每个或导致零假设h0的证伪。该度量在这种情况下通过实际的故障概率说明易错性。
77.这使得能够量化地决定这样的故障概率是否可接受。
78.可选地,在步骤212之后,执行步骤214。
79.在步骤214中检查易错性的度量是否小于阈值。如果易错性的度量小于阈值,则执行步骤216。
80.在步骤216中,根据函数值108来控制机器110或部件。
81.否则不根据函数值来控制机器110或部件。可以规定,在这种情况下,在步骤204中继续所述方法。
82.步骤216也可以设置,如果易错性的度量小于阈值,则将人工神经网络102转移到机器110中。否则,不将人工神经网络102转移到机器中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1