车载摄像头的污染判断方法、污染判断系统以及清洗方法与流程
1.本发明涉及汽车领域,特别涉及一车载摄像头的污染判断方法、污染判断系统以及清洗方法。
背景技术:
2.车载摄像头作为一种采集环境信息数据、感知环境状态的关键传感器是车辆的重要配置部件,用途十分广泛。车载摄像头的镜头表面(即,光学视窗)是裸露的,其暴露在车辆所在环境中,以允许环境光线进入车载摄像头的内部而由车载摄像头拍摄车辆所在环境的图像。由于车辆行驶的环境较为复杂,很容易出现车辆所在环境中的灰尘、水雾等污染物附着在车载摄像头的镜头表面而导致车载摄像头无法拍摄清晰的图像。因此,如何判断车载摄像头的镜头表面是否附着有灰尘、水雾等污染物而导致车载摄像头无法清晰成像是本发明的发明人致力于解决的技术问题。
技术实现要素:
3.本发明的一个目的在于提供一车载摄像头的污染判断方法、污染判断系统以及清洗方法,其中所述污染判断方法基于分类算法模型对车载摄像头拍摄的检测图像进行分类,并根据分类结果可以判断所述车载摄像头的镜头表面是否被污染。
4.本发明的一个目的在于提供一车载摄像头的污染判断方法、污染判断系统以及清洗方法,其中所述污染判断方法能够提供大量的标本图像对所述分类算法模型进行训练,以在后续能够高效且准确地对所述车载摄像头拍摄的检测图像进行分类。
5.本发明的一个目的在于提供一车载摄像头的污染判断方法、污染判断系统以及清洗方法,其中所述污染判断方法能够控制所述车载摄像头在不同场景下和/或透过不同的污染标本进行拍摄,以获得大量的所述标本图像。
6.本发明的一个目的在于提供一车载摄像头的污染判断方法、污染判断系统以及清洗方法,其中所述污染判断方法能够在室内环境中采集大量的所述标本图像,以用于所述分类算法模型的训练,如此能够减少在户外采集所述标本图像的工作量和消除在户外采集所述标本图像时的安全隐患。
7.本发明的一个目的在于提供一车载摄像头的污染判断方法、污染判断系统以及清洗方法,其中在所述车载摄像头的镜头表面被污染时,所述清洗方法能够通过一喷嘴向所述车载摄像头的镜头表面喷射流体而清洗所述车载摄像头。
8.依本发明的一个方面,本发明提供一车载摄像头的污染判断方法,其中所述污染判断方法包括如下步骤:(a)在室内场景平台环境,允许一车载摄像头透过不同灰度等级的污染标本拍摄一包含场景信息的海报,以得到一系列标本图像,其中所述步骤(a)进一步包括步骤:(a.1)在室内搭建一标本图像采集台架;(a.2)在所述标本图像采集台架的一个端部布置所述海报,在所述标本图像采集
台架的另一个端部布置所述车载摄像头;(a.3)在所述车载摄像头和所述海报之间设置所述污染标本,以允许所述车载摄像头透过所述污染标本拍摄所述海报,其中所述污染标本被可更换;(b)将一系列所述标本图像的原始图像数据转换为hsv格式的图像数据;(c)将一系列所述标本图像的hsv格式的图像数据的hsv颜色空间的均值和方差作为特征提取,并输入支持向量机算法模型,以训练一分类算法模型;(d)将所述车载摄像头拍摄的一检测图像的图像数据作为特征输入到所述分类算法模型,以允许所述分类算法模型对所述车载摄像头拍摄的所述检测图像进行分类;(e)根据所述分类算法模型的分类结果,判断所述车载摄像头的镜头表面是否被污染。
9.根据本发明的一个实施例,在所述步骤(a)中,所述车载摄像头在自然光线条件下透过所述污染标本拍摄所述海报。
10.根据本发明的一个实施例,在所述步骤(a.2)之后,所述步骤(a)进一步包括步骤:(a.4)标定所述车载摄像头的视野范围。
11.根据本发明的一个实施例,所述海报中的场景信息是行人横穿马路、行人沿道路行走、两轮车横穿马路或两轮车沿道路骑行。
12.依本发明的另一个方面,本发明进一步提供一车载摄像头的清洗方法,其中所述清洗方法包括如下步骤:(a)将一车载摄像头拍摄的一检测图像的图像数据作为特征输入到一分类算法模型,以允许所述分类算法模型对所述车载摄像头拍摄的所述检测图像进行分类;(b)根据所述分类算法模型的分类结果,判断所述车载摄像头的镜头表面是否被污染;(c)在判断所述车载摄像头的镜头表面被污染时,允许一喷嘴向所述车载摄像头的镜头表面喷射流体,以清洗所述车载摄像头;其中所述步骤(c)进一步包括步骤(c.1)增加所述喷嘴的一伸缩管的一管体通道内的清洗液的压力,以允许清洗液推动所述伸缩管做相对于所述喷嘴的一套管的运动而露出所述喷嘴的一嘴体;(c.2)增加所述伸缩管的所述管体通道内的清洗液的压力,以允许清洗液推动所述喷嘴的一密封元件产生形变而在所述密封元件和所述伸缩管之间形成一液体流道,其中所述液体流道连通所述伸缩管的一中心出液口和一环形出液槽;(c.3)允许所述伸缩管的所述管体通道内的清洗液依次经所述伸缩管的所述中心出液口、所述环形出液槽和一周边出液通道、所述喷嘴的一喷嘴支架的一出液通道以及所述嘴体喷出所述喷嘴和喷向所述车载摄像头的镜头表面而清洗所述车载摄像头。
13.依本发明的另一个方面,本发明进一步提供一车载摄像头的污染判断系统,其包括:一格式转换模块,用于将一车载摄像头拍摄的一系列标本图像的原始图像数据转换为hsv格式的图像数据;一特征提取模块,用于将一系列所述标本图像的hsv格式的图像数据的hsv颜色空间的均值和方差作为特征提取;一训练模块,用于将一系列所述标本图像的特征输入一支持向量机算法模型,以训练一分类算法模型;
一分类模块,用于将所述车载摄像头拍摄的一检测图像的图像数据作为特征输入到所述分类算法模型,以由所述分类算法模型对所述车载摄像头拍摄的所述检测图像进行分类;一判断模块,用于根据所述分类算法模型的分类结果判断所述车载摄像头的镜头表面是否被污染。
14.根据本发明的一个实施例,所述污染判断系统进一步包括一搭建模块,用于在室内搭建一标本图像采集台架,其中一包含场景信息的海报和所述车载摄像头能够分别被布置于所述标本图像采集台架的相对两端,一污染标本被设置于所述车载摄像头和所述海报之间,以允许所述车载摄像头透过所述污染标本拍摄所述海报而得到所述标本图像。
15.根据本发明的一个实施例,所述污染标本被可更换。
16.根据本发明的一个实施例,所述污染判断系统进一步包括一标定模块,用于在一棋盘格被设置于所述标本图像采集台架的端部时标定所述车载摄像头的视野范围。
17.根据本发明的一个实施例,在所述车载摄像头的视野范围被标定后,利用所述海报替换所述棋盘格。
18.根据本发明的一个实施例,海报中的场景信息是行人横穿马路、行人沿道路行走、两轮车横穿马路或两轮车沿道路骑行。
19.本发明的有效果是:首先,所述污染判断方法通过控制所述车载摄像头在所述室内场景平台透过所述污染标本拍摄所述海报的所述标本图像、并且所述污染标本被可更换的方式,能够减少在户外采集所述标本图像的工作量和消除在户外采集所述标本图像时的安全隐患。
20.其次,所述污染判断方法通过将所述车载摄像头和所述海报分别置于所述标本图像采集台架、并且不同灰度等级的所述污染标本被可更换地置于所述车载摄像头和所述海报之间的方式,能够在室内环境采集大量的所述标本图像,以有利于训练所述分类算法模型,从而保证后续判断结果的准确性。
21.再次,所述标本图像采集台架是一个开放式的台架,以允许自然光线进入所述标本图像采集台架的内容,如此相对于灯光模拟的方式而言,本发明的所述污染判断方法采集的所述标本图像具有更真实的模拟效果,从而保证后续判断结果的准确性。
22.第四,所述污染判断方法在控制所述车载摄像头透过所述污染标本拍摄所述海报的所述样本图像之前,能够对所述车载摄像头的视野范围进行标定,以有利于提高所述样本图像的图像质量。
23.第五,在通过所述污染判断方法判断所述车载摄像头的镜头表面被污染时,所述清洗方法能够通过被邻近地设置于所述车载摄像头的所述喷嘴向所述车载摄像头的镜头表面喷射流体,以清洗附着于所述车载摄像头的镜头表面的污染物,从而改善所述车载摄像头的成像质量而有利于行车安全。
24.本本发明的其他有益效果,将在接下来的中被详细地揭露和说明。
附图说明
25.图1示出了依本发明的一污染判断方法的流程。
26.图2示出了依本发明的一样本图像采集台架的立体状态。
27.图3示出了依本发明的标定一车载摄像头的视野范围的状态。
28.图4示出了依本发明的所述车载摄像头透过一污染标本拍摄一海报的状态。
29.图5a示出了依本发明的所述车载摄像头拍摄的第一个标本图像的状态。
30.图5b示出了依本发明的所述车载摄像头拍摄的第二个标本图像的状态。
31.图5c示出了依本发明的所述车载摄像头拍摄的第三个标本图像的状态。
32.图5d示出了依本发明的所述车载摄像头拍摄的第四个标本图像的状态。
33.图6示出了依本发明的一污染判断系统的框图示意图。
34.图7示出了依本发明的一电子设备的框图示意图。
35.图8示出了依本发明的一清洗方法的流程。
36.图9示出了依本发明的一喷嘴的立体状态。
37.图10示出了依本发明的所述喷嘴的分解状态。
38.图11示出了依本发明的所述喷嘴的剖视状态。
39.图12a示出了依本发明的所述喷嘴的局部结构在非工作状态时的剖视示意图。
40.图12b示出了依本发明的所述喷嘴的局部结构在工作状态时的剖视示意图。
41.附图标记说明:100、车载摄像头;200、污染标本;300、海报;400、标本图像采集台架;500、棋盘格;501、标定图案;600、载台;10、格式转换模块;20、特征提取模块;30、训练模块;40、分类模块;50、判断模块;60、搭建模块;70、标定模块;1000、处理器;2000、存储器;3000、输入装置;4000、输出装置;80、喷嘴;81、套管;811、伸缩空间;812、进液通道;82、喷嘴支架;821、形变空间;822、通气孔;823、出液通道;824、安装空间;83、嘴体;84、伸缩管;841、管体通道;842、进液口;843、中心出液口;844、环形出液槽;845、周边出液通道;85、密封元件;86、复位座;861、座体空间;87、第一复位元件;88、装配座;881、装配环;8811、环通道;882、第一装配套管;8821、第一装配空间;883、第二装配套管;8831、第二装配空间;829、第二复位元件;810、密封座;801、流体通道;802、容液空间802。
具体实施方式
42.在详细说明本发明的任何实施方式之前,应理解的是,本发明在其应用中并不限于以下描述阐述或以下附图图示的部件的构造和布置细节。本发明能够具有其他实施方式并且能够以各种方式实践或进行。另外,应理解的是,这里使用的措辞和术语出于描述的目的并且不应该被认为是限制性的。本文中使用“包括”、“包括”或“具有”及其变型意在涵盖下文中陈列的条目及其等同物以及附加条目。除非另有指定或限制,否则术语“安装”、“连接”、“支撑”和“联接”及其变型被广泛地使用并且涵盖直接安装和间接的安装、连接、支撑和联接。此外,“连接”和“联接”不限于物理或机械的连接或联接。
43.并且,第一方面,在本发明的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底
”ꢀ“
内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对
本发明的限制;第二方面,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
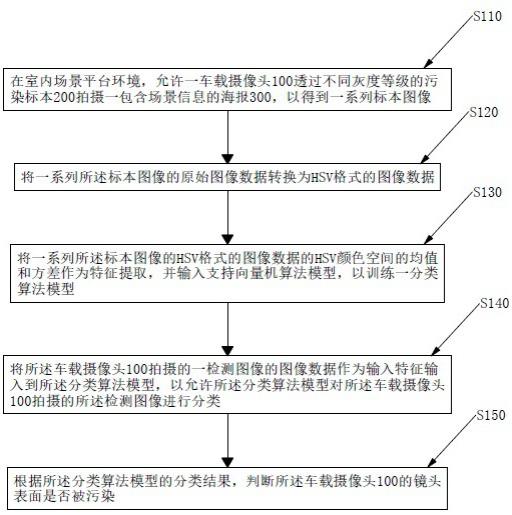
44.参考本发明的说明书附图之附图1,依本发明的一较佳实施例的一污染判断方法在接下来的描述中将被揭露和被阐述,所述污染判断方法用于判断一车载摄像头100是否被污染,其中所述污染判断方法包括如下步骤:s110,在室内场景平台环境,允许所述车载摄像头100透过不同灰度等级的污染标本200拍摄一包含场景信息的海报300,以得到一系列标本图像;s120,将一系列所述标本图像的原始图像数据转换为hsv格式的图像数据;s130,将一系列所述标本图像的hsv格式的图像数据的hsv颜色空间的均值和方差作为特征提取,并输入一支持向量机算法模型,以训练一分类算法模型;s140,将所述车载摄像头100拍摄的一检测图像的图像数据作为特征输入到所述分类算法模型,以允许所述分类算法模型对所述车载摄像头100拍摄的所述检测图像进行分类;以及;s150,根据所述分类算法模型的分类结果,判断所述车载摄像头100的镜头表面是否被污染。
45.也就是说,本发明的所述污染判断方法可以通过所述车载摄像头100拍摄大量的所述标本图像,以利用所述标本图像对所述分类算法模型进行训练,在所述车载摄像头100拍摄的所述检测图像的图像数据被输入到所述分类算法模型后,所述分类算法模型能够高效且准确地对所述车载摄像头100拍摄的所述检测图像进行分类,以在后续根据所述分类算法模型的分类结果判断所述车载摄像头100的镜头表面是否被污染。并且,根据所述分类算法模型的分类结果,所述污染判断方法可以判断所述车载摄像头100的镜头表面被污染的程度。
46.本发明的所述污染判断方法在对所述分类算法模型进行训练时,需要使用到大量的所述标本图像,为了使所述标本图像具有较强的泛化能力和鲁棒性能,本发明的所述污染判断方法需要控制所述车载摄像头100在不同场景下和/或透过不同灰度等级的所述污染标本200对所述海报300进行拍摄和/或透过所述污染标本200对包含不同场景信息的所述海报300进行拍摄,以获得大量的所述标本图像。
47.为了减少在户外采集所述标本图像的工作量和消除在户外采集所述标本图像时的安全隐患,本发明的所述污染判断方法控制所述车载摄像头100在一室内场景平台环境透过所述污染标本200拍摄所述海报300,如图2至图5d所示。换言之,在所述步骤s110中,所述车载摄像头100在所述室内场景平台环境透过所述污染标本200拍摄所述海报300,以得到所述标本图像。
48.具体地,所述步骤s110进一步包括如下步骤:s1101,在室内搭建一标本图像采集台架400;s1102,在所述标本图像采集台架400的一个端部布置所述海报300,在所述标本图像采集台架400的另一个端部布置所述车载摄像头100;s1103,在所述车载摄像头100和所述海报300之间设置所述污染标本200,以允许所述车载摄像头100透过所述污染标本200拍摄所述海报300。
49.值得一提的是,所述车载摄像头100被布置于所述标本图像采集台架400的端部的
方式在本发明的所述污染判断方法中不受限制。例如,所述车载摄像头100可以通过一个载台600被布置于所述标本图像采集台架400的端部。优选地,所述载台600被设置能够调节所述车载摄像头100的位置和角度。
50.值得一提的是,在所述车载摄像头100和所述海报300之间设置所述污染标本200的方式在本发明的所述污染判断方法中不受限制。例如,所述污染标本200可以包括一透光基材和附着于所述透光基材的污染物,所述透光基材能够被可拆卸地安装于所述标本图像采集台架400,以设置所述污染标本200于所述车载摄像头100和所述海报300之间。通过更换具有不同灰度等级的所述污染标本200的方式,所述车载摄像头100在透过具有不同灰度等级的所述污染标本200拍摄所述海报300时能够得到不同的所述标本图像。
51.在本发明的所述污染判断方法的一些实施例中,所述海报300可以是实体海报,其被可拆卸地安装于所述标本图像采集台架400的端部,从而通过更换具有不同灰度等级的所述污染标本200和具有不同场景信息的所述海报300的方式,所述车载摄像头100能够拍摄大量的所述标本图像,以提高所述样本图像的泛化能力和鲁棒性能。在本发明的所述污染判断方法的另一些实施例中,所述海报300可以是虚拟海报,其被投射于所述标本图像采集台架400的端部,从而通过更换具有不同灰度等级的所述污染标本200和投射具有不同场景信息的所述海报300的方式,所述车载摄像头100能够拍摄大量的所述标本图像,以提高所述样本图像的泛化能力和鲁棒性能,并提高所述标本图像的采集速度,从而提高训练所述分类算法模型的效率。
52.优选地,所述海报300中的场景信息是行人横穿马路、行人沿道路行走、两轮车横穿马路或两轮车沿道路骑行,以模拟真实场景。优选地,为了进一步还原真实场景,可以在所述标本图像采集台架400的周壁张贴包含道路斑马线的照片。
53.在所述步骤s1102之后,所述步骤s110进一步包括步骤:标定所述车载摄像头100的视野范围。
54.具体地,参考附图2,所述标本图像采集台架400使用160cm
×
64cm
×
64cm的框架来构建,所述海报300的可见范围为37cm
×
20.5cm。换言之,所述车载摄像头100在所述海报300的视野范围为37cm
×
20.5cm。本领域技术人员可以理解的是,所述车载摄像头100在所述海报300的视野范围为37cm
×
20.5cm,并不意味着所述海报300的尺寸仅为37cm
×
20.5cm,即,所述海报300的尺寸可以大于37cm
×
20.5cm。优选地,所述海报300的尺寸大于37cm
×
20.5cm,例如所述海报300的尺寸可以达到64cm
×
64cm,以允许所述海报300适配不同类型的所述车载摄像头100。
55.为了保证所述车载摄像头100在所述海报的视野范围为37cm
×
20.5cm,本发明的所述污染判断方法采用棋盘格标定法对所述车载摄像头100在所述海报300上的视野范围进行标定,其中标定用的棋盘格500如图3所示,所述棋盘格500具有多个圆形的标定图案501,这些所述标定图案501形成四排,其中所述标定图案501的直径为4cm,同一排所述标定图案501中的相邻两个所述标定图案501的圆心之间的间距为11cm,相邻排的所述标定图案501的圆心之间的间距为5.5cm。在利用棋盘格标定法对所述车载摄像头100的视野范围进行标定时,通过调整所述车载摄像头100的焦距来使所述车载摄像头100的视野范围与所述棋盘格500中的圆形的所述标定图案501的位置对应,以实现对所述车载摄像头100的视野标定。
56.值得一提的是,在本发明的所述污染判断方法的一些实施例中,所述棋盘格500是实体棋盘格,其被可拆卸地安装于所述标本图像采集台架400的一个端部,从而在利用所述棋盘格500对所述车载摄像头100的视野范围进行标定后,可以将所述棋盘格500自所述标本图像采集台架400的端部拆卸,并设置所述海报300于所述标本图像采集台架400的端部,并且在所述海报300替换所述棋盘格500的过程中,保持所述车载摄像头100和所述标本图像采集台架400的位置不变,从而在所述海报300替换所述棋盘格500后,保证所述车载摄像头100在所述海报300的视野范围为标定后的视野范围。在本发明的所述污染判断方法的另一些实施例中,所述棋盘格500为虚拟棋盘格,其被投射于所述标本图像采集台架400的端部,从而在利用所述棋盘格500对所述车载摄像头100的视野范围进行标定后,可以投射所述海报300于所述标本图像采集台架400的端部,通过这样的方式,能够保证所述车载摄像头100在所述海报300的视野范围为标定后的视野范围,同时提高所述海报300替换所述棋盘格500的效率。
57.在本发明的所述污染判断方法的一些实施例中,所述标本图像采集台架400的周壁为开放式的,以使自然光线进入所述标本图像采集台架400界定的空间内,从而允许所述车载摄像头100在自然光线中透过所述污染标本200拍摄所述海报300而得到所述标本图像。
58.参考附图4至图5d,在对所述车载摄像头100的视野范围标定后,利用所述海报300替换所述棋盘格500,此时,所述车载摄像头100在所述海报300的视野范围为标定后的视野范围。所述车载摄像头100可以在自然条件下透过所述污染标本200对所述海报300进行拍照而得到所述标本图像。可以理解的是,一方面,依次更换具有不同灰度等级的所述污染标本200并允许所述车载摄像头100透过所述污染标本200拍摄所述海报300,可以得到一系列所述标本图像,另一方面,依次更换具有不同场景信息的所述海报300并允许所述车载摄像头100透过所述污染标本200拍摄所述海报300,可以得到一系列所述标本图像。
59.在获得一系列所述标本图像后,所述污染判断方法将一系列所述标本图像的原始图像数据转换成hsv格式,其中在hsv颜色空间模型中:色调h:色调用角度度量,取值范围为0
°‑
360
°
。从红色开始按逆时针方向计算,红色为0
°
,绿色为120
°
,蓝色为240
°
。它们的补色是黄色为60
°
、青色为180
°
、品红为300
°
。
60.饱和度s:饱和度s表示颜色接近光谱色的程度。任何一种颜色,可以看成是某种光谱色和白色混合的结果,其中光谱色所占的比例越大,颜色接近光谱色的程度越高,颜色的饱和度越高。饱和度高,颜色则深而艳,当光谱色中的白光成分为0时,饱和度达到最高。饱和度的取值范围为0%-100%,值越大,颜色越饱和。
61.亮度v:亮度表示颜色明亮的程度。对于光源色,亮度值和发光体的光亮度有关,对于物体色,此值和物体的透射比例或反射比有关。亮度的取值范围为0%(黑)到100%(白)。
62.对所述车载摄像头100拍摄的一系列所述标本图像的原始图像数据中的各项信息和hsv格式的图像数据中的各项信息进行统计,在将两者对比后可知,随着所述标本图像的污染程度的加深,图像的饱和度s的均值在下降,同时,hsv各项数据的方差都在减小,说明数据的对比度越来越小,边缘特征越来越不明显。可以理解的是,所述标本图像的污染程度对应于所述污染标本200的灰度等级,所述污染标本200的灰度等级越高,所述车载摄像头100透过所述污染标本200拍摄所述海报300后得到的所述样本图像的污染程度越严重。
63.在夜晚光线不足的环境下,所述车载摄像头100的进光量不足会导致所述车载摄像头100无法捕捉到更多反映环境状态的信息,从而导致所述车载摄像头100在夜晚光线不足时的成像质量低于白天光线充足时的成像质量。在夜晚光线不足的环境中,将所述车载摄像头100直接拍摄的所述海报300得到所述样本图像的图像数据的统计信息(即,所述样本图像的图像数据在hsv颜色空间模型中的各项特征值)和所述车载摄像头100透过所述污染标本200拍摄的所述海报300的所述样本图像的图像数据的统计信息对比后可知,在夜晚光线不足的环境中,所述车载摄像头100透过所述污染标本200拍摄的所述海报300的所述样本图像的图像数据的饱和度s的均值更小,且低于所述车载摄像头100直接拍摄的所述海报300得到所述样本图像的图像数据的饱和度s的均值。因此,相对于正常的所述标本图像(即,所述车载摄像头100直接拍摄的所述海报300得到所述样本图像),受污染的所述样本图像(即,所述车载摄像头100透过所述污染标本200拍摄的所述海报300的所述样本图像)在hsv颜色空间模型中的各项特征值都具有相对比较明显的特征,因此图像数据的hsv颜色空间的均值和方差可以作为特征提取,并输入所述支持向量机算法模型,以训练所述分类算法模型。
64.由于受污染的所述样本图像在hsv颜色空间模型中的各项特征值都具有相对明显的特征,因此所述污染判断方法可以将大量的受污染的所述样本图像在hsv颜色空间中的特征(均值和方差)输入到所述支持向量机算法模型,以便于训练所述分类算法模型。
65.在需要判断所述车载摄像头100的镜头表面是否被污染时,首先需要将所述车载摄像头100拍摄的所述检测图像的图像数据的统计信息(即,所述检测图像的图像数据在hsv颜色空间模型中的各项特征值)可以被作为特征输入到所述分类算法模型,其次所述分类算法模型对所述车载摄像头100拍摄的所述检测图像进行分类,最后,根据所述分类算法模型的分类结果即可判断所述车载摄像头100的镜头表面是否被污染。
66.根据本发明的另一个方面,参考附图6,本发明进一步提供一污染判断系统,供判断所述车载摄像头100的镜头表面是否被污染,其中所述污染判断系统包括一格式转换模块10、一特征提取模块20、一训练模块30、一分类模块40以及一判断模块50。
67.具体地,所述格式转换模块10用于将所述车载摄像头100拍摄的一系列所述标本图像的原始图像数据转换为hsv格式的图像数据。所述特征提取模块20用于将一系列所述标本图像的hsv格式的图像数据的hsv颜色空间的均值和方差作为特征提取。所述训练模块30用于将一系列所述标本图像的特征输入所述支持向量机算法模型,以训练所述分类算法模型。所述分类模块40用于将所述车载摄像头100拍摄的所述检测图像的图像数据作为特征输入到所述分类算法模型,以由所述分类算法模型对所述车载摄像头100 拍摄的所述检测图像进行分类。所述判断模块50用于根据所述分类算法模型的分类结果判断所述车载摄像头100的镜头表面是否被污染。
68.进一步地,所述污染判断系统包括一搭建模块60,所述搭建模块60用于在室内搭建所述标本图像采集台架400,其中所述海报300和所述车载摄像头100能够分别被布置于所述标本图像采集台架400的相对两端,所述污染标本200被设置于所述车载摄像头100和所述海报300之间,以允许所述车载摄像头100透过所述污染标本200拍摄所述海报300而得到所述标本图像,从而在后续,所述格式转换模块10能够将所述标本图像的原始图像数据转换为hsv格式的图像数据。
69.优选地,所述污染标本200被可更换,例如,所述污染标本200被可拆卸地安装于所述标本图像采集台架400,以保持所述污染标本200于所述车载摄像头100和所述海报300之间,从而所述车载摄像头100能够透过所述污染标本200拍摄所述海报300而得到所述样本图像。通过更换具有不同灰度等级的所述污染标本200,大量的所述标本图像能够被获取,以用于训练所述分类算法模型。并且通过这样的方式,所述样本图像具有较强的泛化能力和鲁棒性能。
70.优选地,所述海报300被可更换,例如,所述海报300被可拆卸地安装于所述样本图像采集台架400,或者所述海报300被可更换地投射于所述样本图像采集台架400,通过更换具有不同场景信息的所述海报300的方式,大量的所述标本图像能够被获取,以用于训练所述分类算法模型。并且通过这样的方式,所述样本图像具有较强的泛化能力和鲁棒性能。
71.在本发明的所述污染判断系统的一些实施例中,所述搭建模块60搭建的所述样本图像采集台架400的尺寸为160cm
×
64cm
×
64cm的框架结构,以允许自然光线能够进入所述样本图像采集台架400的内部,从而所述车载摄像头100被允许在自然光线条件下透过所述污染标本200拍摄所述海报300。所述海报300的尺寸大于37cm
×
20.5cm。为了保证所述车载摄像头100在所述海报300的视野范围为37cm
×
20.5cm,本发明的所述污染判断系统进一步包括一标定模块70,所述标定模块70用于在所述棋盘格500被设置于所述样本图像采集台架400的端部时标定所述车载摄像头100的视野范围。
72.具体地,所述棋盘格500具有多个圆形的所述标定图案501,这些所述标定图案501形成四排,其中所述标定图案501的直径为4cm,同一排所述标定图案501中的相邻两个所述标定图案501的圆心之间的间距为11cm,相邻排的所述标定图案501的圆心之间的间距为5.5cm。在利用棋盘格标定法对所述车载摄像头100的视野范围进行标定时,通过调整所述车载摄像头100的焦距来使所述车载摄像头100的视野范围与所述棋盘格500中的圆形的所述标定图案501的位置对应,以实现对所述车载摄像头100的视野标定。在所述标定模块70对所述车载摄像头100的视野范围进行标定后,利用所述海报300替换所述棋盘格500,以在后续允许所述车载摄像头100在自然光线条件下透过所述污染标本200拍摄所述海报300而得到所述样本图像。
73.这里,本领域技术人员可以理解,所述污染判断系统的各个模块的具体功能和操作已经在上面参考附图1至图5d的所述污染判断方法的描述中得到了详细的介绍,并因此,将省略其重复描述。
74.值得一提的是,本发明的所述污染判断系统可以实现在各种终端设备中,例如计算机或具有计算功能的设备。在一些实施例中,所述污染判断系统可以作为一个软件模块和/或硬件模块集成到终端设备中。例如,所述污染判断系统可以是终端设备的操作系统中的一个软件模块,或者可以是针对该终端设备所开发的一个应用程序,当然,所述污染判断系统同样可以是终端设备的众多硬件模块之一。
75.依本发明的另一个方面,参考附图7,本发明进一步提供一电子设备,其中所述电子设备包括至少一处理器1000和至少一存储器2000。
76.所述处理器1000可以是中央处理单元(cpu)或者具有数据处理能力和/或指令执行能力的其他形式的处理单元,并且可以控制所述电子设备中的其他组件以执行期望的功能。
77.所述存储器2000可以包括一个或多个计算机程序产品,所述计算机程序产品可以包括各种形式的计算机可读存储介质,例如易失性存储器和/或非易失性存储器,其中所述易失性存储器可以包括随机存取存储器(ram)和/或高级缓存存储器(cache)等,其中所述非易失性存储器可以包括只读存储器(rom)、硬盘、闪存等。
78.在所述存储器2000上可以存储一个或多个计算机程序指令,所述处理器1000能够自所述存储器2000读取所述计算机程序指令并执行所述计算机程序指令,以实现本发明在上述所揭露的所述污染判断方法和所述污染判断系统。
79.优选地,所述电子设备还包括一输入装置3000和一输出装置4000,所述输入装置3000和所述输出装置4000可以通过总线系统和/或其他形式的连接方式互联。
80.依本发明的另一个方面,参考附图8,本发明进一步提供一清洗方法,用于清洗所述车载摄像头100的镜头表面,其中所述清洗方法包括如下步骤:步骤1001,将所述车载摄像头100拍摄的所述检测图像的图像数据作为特征输入到所述分类算法模型,以允许所述分类算法模型对所述车载摄像头100拍摄的所述检测图像进行分类;步骤1002,根据所述分类算法模型的分类结果,判断所述车载摄像头100的镜头表面是否被污染;以及步骤1003,在判断所述车载摄像头100的镜头表面被污染时,允许一喷嘴80向所述车载摄像头100的镜头表面喷射流体,以清洗所述车载摄像头100。
81.优选地,所述喷嘴80和所述车载摄像头100可以被邻近地设置,从而在所述车载摄像头100的镜头表面被污染时,所述喷嘴80可以通过向所述车载摄像头100的镜头表面喷射流体的方式清洗所述车载摄像头100,以去除附着于所述车载摄像头100的镜头表面的污染物,如此所述车载摄像头100能够清晰成像。
82.优选地,在所述车载摄像头100的镜头表面被污染时,所述喷嘴80可以通过向所述车载摄像头100的镜头表面喷射清洗液的方式清洗所述车载摄像头100,以去除附着于所述车载摄像头100的镜头表面的污染物。
83.参考附图9至图12b,所述喷嘴80包括一套管81、一喷嘴支架82、一嘴体83、一伸缩管84、一可变形的密封元件85、一复位座86以及一第一复位元件87。
84.所述套管81具有一伸缩空间811。所述喷嘴支架82具有一形变空间821、一通气孔822以及至少一出液通道823,所述通气孔822连通于所述形变空间821,所述嘴体83被安装于所述喷嘴支架82,并且所述嘴体83连通于所述喷嘴支架82的所述出液通道823。所述伸缩管84被可伸缩地安装于所述套管81的所述伸缩空间811,其中所述伸缩管84具有一管体通道841、一进液口842、一中心出液口843、一环形出液槽844以及至少一周边出液通孔845,所述进液口842和所述中心出液口843分别在所述伸缩管84的相对两端连通所述伸缩管84的所述管体通道841,所述环形出液槽844环绕于所述中心出液口843,所述周边出液通孔845连通所述环形出液槽844。所述喷嘴支架82被安装于所述伸缩管84,并且所述伸缩管84的所述周边出液通孔845连通所述喷嘴支架82的所述出液通道823。所述密封元件85以可变形的方式被保持在所述喷嘴支架82和所述伸缩管84之间,并且所述密封元件85能够封闭所述伸缩管84的所述中心出液口843以及阻止在所述喷嘴支架82和所述伸缩管84之间形成缝隙。所述复位座86被可移动地设置于所述喷嘴支架82的所述形变空间821,并且所述复位座86
抵靠所述密封元件85,所述第一复位元件87被可变形地设置于所述喷嘴支架82的所述形变空间821,并且所述第一复位元件87的相对两端分别抵靠所述喷嘴支架82的内壁和所述复位座86。
85.在所述喷嘴80处于非工作状态时,所述第一复位元件87和所述复位座86允许所述密封元件85被保持在用于封闭所述伸缩管84的所述中心出液口843的状态。
86.在需要所述喷嘴80清洗所述车载摄像头100的镜头表面时,首先,驱动所述伸缩管84做相对于所述套管81的运动,以允许所述嘴体83露出,并且所述嘴体83朝向所述车载摄像头100的镜头表面。其次,增加所述伸缩管84的所述管体通道841内的清洗液的压力,以允许清洗液施加压力至所述密封元件85而使所述密封元件85产生变形,此时,一方面,所述密封元件85通过所述复位座86推动所述第一复位元件87产生形变而允许所述第一复位元件73积蓄弹性势能,另一方面,在所述密封元件85和所述伸缩管84之间形成喷嘴80的一液体流道801,以连通所述伸缩管84的所述中心出液口843和所述环形出液槽844,并且所述密封元件85阻止在所述喷嘴支架82和所述伸缩管84之间形成缝隙,如此所述伸缩管84的所述管体通道841内的清洗液能够依次经所述伸缩管84的所述中心出液口843、所述环形出液槽844和所述周边出液通孔845、所述喷嘴支架82的所述出液通道823以及所述嘴体83喷出所述喷嘴80和喷向所述车载摄像头100的镜头表面,以清洗附着于所述车载摄像头100的镜头表面的污染物,从而保证所述车载摄像头100清晰成像。
87.在所述伸缩管84的所述管体通道841内的清洗液的压力被减小至小于所述第一复位元件87的弹性势能时,所述第一复位元件87在恢复初始状态的过程中通过所述复位座86向所述伸缩管84的方向推动所述密封元件85,以允许所述密封元件85恢复封闭所述伸缩管84的所述中心出液口843。并且,所述伸缩管84能够被驱动做相对于所述套管81的运动。
88.在利用所述喷嘴80清洗所述车载摄像头100的镜头表面的过程中,一方面,所述喷嘴支架82的所述形变空间821内的气体可以随着所述复位座86的位移自所述喷嘴支架82的所述通气孔822排出,另一方面,所述伸缩管84的所述管体通道841内的清洗液在依次经所述伸缩管84的所述中心出液口843、所述环形出液槽844和所述周边出液通孔845、所述喷嘴支架82的所述出液通道823以及所述嘴体83喷出时不会形成回流,如此清洗液在自所述嘴体83喷出时的压力值和清洗液在所述伸缩管84的所述管体通道841内的压力值一致,以保证清洗液自所述喷嘴80向所述车载摄像头100的镜头表面的喷射速度,以提高所述车载摄像头100的镜头表面的清洗效果。在对所述车载摄像头100的镜头表面清洗后,外部气体可以随着所述复位座86的位移自所述喷嘴支架82的所述通气孔822进入所述喷嘴支架82的所述形变空间821。
89.优选地,所述复位座86具有一座体空间861,所述第一复位元件87的一个端部被保持在所述复位座86的所述座体空间861,以避免所述第一复位元件87脱离所述复位座86,从而保证所述喷嘴80的可靠性和稳定性。
90.值得一提的是,所述第一复位元件87的具体结构在本发明中不受限制,例如,所述第一复位元件87可以是压簧。
91.优选地,所述喷嘴80包括两个所述嘴体83,相应地,所述喷嘴支架82具有两个所述出液通道823,每个所述嘴体83和所述喷嘴支架82的每个所述出液通道823相连通,通过这样的方式,能够增加所述喷嘴80的清洗面积。更优选地,所述喷嘴80的两个所述嘴体83的朝
向不同,例如,位于上方的所述嘴体83的朝向倾斜向上,位于下方的所述嘴体83的朝向倾斜向下,如此进一步增加所述喷嘴80的清洗面积。
92.参考附图9至图12b,所述喷嘴支架82进一步具有一安装空间824,其中所述伸缩管84的一个端部延伸至所述喷嘴支架82的所述安装空间824,并且所述伸缩管84被安装于所述喷嘴支架82的所述安装空间824,以实现所述喷嘴支架82和所述伸缩管84的安装。
93.继续参考附图9至图12b,所述喷嘴80进一步包括一装配座88和一第二复位元件89,其中所述套管81的一个端部被安装于所述装配座88,所述第二复位元件89被套装于所述伸缩管84,并且所述第二复位元件89的相对两端分别抵靠所述伸缩管84和所述装配座88。
94.当所述伸缩管84被驱动做相对于所述套管81的运动以允许所述喷嘴80的所述嘴体83露出时,所述第二复位元件89产生形变而积蓄弹性势能;当驱动所述伸缩管84的外力撤销时,所述第二复位元件89在恢复初始状态的过程中能够推动所述伸缩管84做相对于所述套管81的运动。
95.值得一提的是,所述第二复位元件89的具体结构在本发明中不受限制,例如,所述第二复位元件89可以是压簧。
96.所述装配座88包括一装配环881和一体地延伸于所述装配环881的一侧的一第一装配套管882,所述装配环881具有一环通道8811,所述第一装配套管882具有一第一装配空间8821,所述装配环881的所述环通道8811和所述第一装配套管882的所述第一装配空间8821相连通。所述套管81的一个端部延伸至所述第一装配套管882的所述第一装配空间8821,并且所述套管81的端部和所述第一装配套管882相互安装,其中所述喷嘴支架82经所述装配环881的所述环通道8811延伸至所述第一装配套管882的所述第一装配空间8821,其中所述第二复位元件89被隐藏在所述装配座88和所述套管81之间,且所述第二复位元件89的相对两端分别抵靠所述伸缩管84的一个端部和所述装配环881。
97.所述装配座88进一步包括一第二装配套管883,所述第二装配套管883具有一第二装配空间8831,其中所述第二装配套管883一体地延伸于所述装配环881的另一侧,并且所述第二装配套管883的所述第二装配空间8831和所述装配环881的所述环通道8811相连通,其中所述嘴体83的一部分能够被装配在所述第二装配套管883的所述第二装配空间8831,以由所述装配座88的所述第二装配套管883限制所述嘴体83的朝向。
98.继续参考附图9至图12b,所述喷嘴80进一步包括一密封座810,所述密封座810被套装于所述伸缩管84的端部,并且所述密封座810的外壁贴合于所述套管81的内壁,以在所述伸缩管84、所述密封座810和所述套管81之间形成所述喷嘴80的一容液空间802,所述伸缩管84的所述进液口842连通所述容液空间802,其中所述套管81进一步具有一进液通道812,所述套管81的所述进液通道812和所述喷嘴80的所述容液空间802相连通。当高压的清洗液自所述套管81的所述进液通道812进入所述喷嘴80的所述容液空间802时,高压的清洗液能够推动所述密封座810带动所述伸缩管84于所述套管81的所述伸缩空间811内做相对于所述套管81的运动,以允许所述喷嘴80的所述嘴体83露出。另外,高压的清洗液能够推动所述密封元件85产生变形,以在所述密封元件85和所述伸缩管84之间形成所述喷嘴80的所述液体流道801,从而清洗液能够依次经所述伸缩管84的所述中心出液口843、所述环形出液槽844和所述周边出液通孔845、所述喷嘴支架82的所述出液通道823以及所述嘴体83喷
出所述喷嘴80和喷向所述车载摄像头100的镜头表面,以清洗附着于所述车载摄像头100的镜头表面的污染物,从而允许所述车载摄像头100清晰成像。
99.所述喷嘴80清洗所述车载摄像头100的镜头表面的过程如下。
100.当高压的清洗液自所述套管81的所述进液通道812进入所述喷嘴80的所述容液空间802时,高压的清洗液推动所述密封座810带动所述伸缩管84于所述套管81的所述伸缩空间811内做相对于所述套管81的运动,以允许所述喷嘴80的所述嘴体83露出。在这个过程中,所述第二复位元件89被所述伸缩管84朝向所述装配座88的方向挤压而产生形变以积蓄弹性势能。
101.高压的清洗液推动所述密封元件85产生变形,以在所述密封元件85和所述伸缩管84之间形成所述喷嘴80的所述液体流道801,从而清洗液能够依次经所述伸缩管84的所述中心出液口843、所述环形出液槽844和所述周边出液通孔845、所述喷嘴支架82的所述出液通道823以及所述嘴体83喷出所述喷嘴80和喷向所述车载摄像头100的镜头表面,以清洗附着于所述车载摄像头100的镜头表面的污染物,从而允许所述车载摄像头100清晰成像。在这个过程中,一方面,所述喷嘴支架82的所述形变空间821内的气体可以随着所述复位座86的位移自所述喷嘴支架82的所述通气孔822排出,另一方面,所述伸缩管84的所述管体通道841内的清洗液在依次经所述伸缩管84的所述中心出液口843、所述环形出液槽844和所述周边出液通孔845、所述喷嘴支架82的所述出液通道823以及所述嘴体83喷出时不会形成回流,如此清洗液在自所述嘴体83喷出时的压力值和清洗液在所述伸缩管84的所述管体通道841内的压力值一致,以保证清洗液自所述喷嘴80喷向所述车载摄像头100的镜头表面的的喷射速度,以提高所述车载摄像头100的镜头表面的清洗效果。换言之,高压的清洗液在推动所述密封元件85变形且经所述喷嘴80的所述液体流道801自所述伸缩管84的所述中心出液口843流向所述环形出液槽844时,高压的清洗液的压力值不会被降低,从而保证清洗液自所述喷嘴80喷向所述车载摄像头100的镜头表面的喷射速度。
102.当所述喷嘴80的所述容液空间802内的清洗液的压力降低后,在所述第一复位元件87的作用下,所述密封元件85恢复至初始状态以阻止所述伸缩管84的所述中心出液口843和所述环形出液槽844连通,在所述第二复位元件89的作用下,所述伸缩管84于所述套管81的所述伸缩空间811内做相对于所述套管81运动。
103.本领域的技术人员应理解,上述描述及附图中所示的本发明的实施例只作为举例而并不限制本发明。本发明的目的已经完整并有效地实现。本发明的功能及结构原理已在实施例中展示和说明,在没有背离所述原理下,本发明的实施方式可以有任何变形或修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1