一种忆阻神经网络预定时间同步能量消耗可调节的方法
1.本发明涉及自动控制技术领域,特别是一种忆阻神经网络预定时间同步能量消耗可调节的方法。
背景技术:
2.非线性系统之间的预定时间同步是指设计一个控制器实现驱动系统与响应系统之间实现在给定时间内同步。当进行非线性系统之间同步控制器设计的时候,一个不可避免的问题就是控制器的能量消耗问题,特别是在电力行业或者多智能体编队网络中。在多智能体主从控制中,从机器人要想快速跟踪主机器人的位置姿态,则需要大的控制增益,而大的控制增益需要更多的控制器能量消耗,而机器人本身载荷有限,特别是在无人机编队中,无人机本身载重有限,无法承载多余的电池,导致其续航时间有限。因此,在2013年,yuan提出了完全控制器用以实现自由复杂神经网络之间的控制,并对控制器的能量消耗进行了估计。而文献“closed-loop control ofnonlinear neural networks:the estimate ofcontrol time and energy cost”中作者对非线性神经网络设计有限时间控制器,并对控制器的能量消耗进行了估计。但目前对控制器的能量消耗的研究都是基于已设计的控制器并对其进行能量消耗估计,其能量消耗是已成事实的,不可调节的。难以建立系统同步时间与能量消耗之间的直接显式关系。实际系统中由于载体本身的能量有限,如何利用有限的能量实现更多任务规划,如何根据不同的场景设计不同的控制器使得能量消耗是可调节的。
技术实现要素:
3.本发明的目的在于提供一种忆阻神经网络预定时间同步能量消耗可调节的方法,该方法可以实现具有能量可调节的忆阻神经网络的预定时间同步。
4.为实现上述目的,本发明的技术方案是:一种忆阻神经网络预定时间同步能量消耗可调节的方法,包括如下步骤:
5.步骤s1、基于忆阻神经网络,建立驱动系统和响应系统;
6.步骤s2、根据步骤s1建立的驱动系统和响应系统,建立同步误差系统;
7.步骤s3、基于控制器能量消耗公式,设计能量消耗可调节稳定性定理;
8.步骤s4、基于步骤s2的同步误差系统和步骤s3的能量消耗可调节稳定性定理,设计能量消耗可调节主动控制器,进行能量消耗可调节的忆阻神经网络同步控制。
9.在本发明一实施例中,步骤s1具体为:
10.步骤s11、建立驱动系统的状态方程:
[0011][0012]
步骤s12、建立响应系统的状态方程:
[0013][0014]
式中,xi(t)与yi(t)表示第i个神经元的状态矢量;ci是一个常数,表示神经元的自我抑制速率;fj(*)为激活函数,且|fj(*)|≤mj,mj>0;ri表示系统的主动控制器,ii表示外部未知输入,p
ij
表示第i个神经元和第j个神经元之间的记忆连接权重,其表示为:
[0015][0016]
式中,yi>0,是忆阻切换信号,yi、pi′j、pi′j′
均为已知常数,i,j=1,2,...,n。
[0017]
在本发明一实施例中,步骤s2具体为:
[0018]
将驱动系统与响应系统的预定时间投影同步误差设定为:
[0019]ei
(t)=yi(t)-xi(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0020]
将上式进行求导,得到预定时间投影同步误差系统:
[0021][0022]
式中,ei(t)=(e1(t),e2(t),...,en(t))
t
。
[0023]
在本发明一实施例中,步骤s3具体为:
[0024]
步骤s31、控制器能量消耗的具体定义为:
[0025][0026]
其中ri是系统的主动控制器,ξi为系统的主动控制器ri的能量消耗;ξ是系统总的能量消耗;
[0027]
步骤s32、固定时间稳定的能量消耗:设计一个在[0,+∞)上连续且无界的函数v(x),并且满足:
[0028][0029]
其中常数满足α>0,β>0,0<p<1,稳定时间t
finite
的计算公式为:
[0030][0031]
其中x0为初始值,主动控制器设计为
[0032]
r=(αv
p
+β)
[0033]
根据公式(6)可知
[0034]
dv=(-αv
p-β)dt
[0035]
根据公式(5),得到
[0036][0037]
因此
[0038][0039]
步骤s33、预定时间稳定的能量消耗:设计一个在[0,+∞)上连续且无界的函数v(x),并且满足:
[0040]
(1)
[0041]
(2)tc是用户定义的预定义的时间参数;
[0042]
(3)对于任何v(x)>0,都存在常数α,β,p>0,由此:
[0043][0044]
其中
[0045][0046]
主动控制器设计为
[0047][0048]
根据公式(5),得到
[0049][0050]
其中:
[0051][0052]
得到
[0053][0054]
在本发明一实施例中,步骤s4具体为:步骤s41、预定时间主动控制器设计为:
[0055][0056]
其中sign()为符号函数,满足步骤s33常数α,β的定义;
[0057]
步骤s42、能量消耗可调节主动控制器设计为
[0058][0059]
其中α
max
=max{α1,α2,
…
,αn},β
max
=max{β1,β2,
…
,βn}满足步骤s33常数α,β的定义,如果cv>>tc,则有
[0060][0061]
其中
[0062][0063]
相较于现有技术,本发明具有以下有益效果:
[0064]
1、本发明利用控制器能量消耗公式,设计了一种系统能量消耗可控制的稳定性定理;
[0065]
2、本发明与最小能量控制相比,其驱动-响应系统同步所需能量是可以根据需要进行预先设定,这样使得本发明能更好、更准确的预测两个系统同步的能量消耗。使本发明有更广泛的应用场景,提高系统的可应用性。
附图说明
[0066]
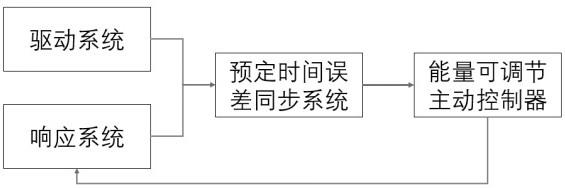
图1为本发明的方法流程示意图。
[0067]
图2为本发明具体实施例1中,系统(11)取不同初始值在主动控制器(12)下的响应曲线,其中(a)是不同初始值下的稳定曲线,(b)是主动控制器(12)能量消耗的估计。
[0068]
图3为本发明具体实施例1中,系统(11)在主动控制器(13)取不同可调节时间tc下的响应曲线,其中(a)是不同tc下的稳定曲线,(b)是主动控制器(13)能量消耗的估计。
[0069]
图4是本发明具体实施例2中,主动控制器按照式(17)且tc=0.1的输入下驱动系统(14)和响应系统(15)的响应曲线,其中(a)为同步误差响应曲线,(b)为主动控制器的能量消耗。
[0070]
图5是本发明具体实施例2中,主动控制器按照式(17)且tc=0.02的输入下驱动系统(14)和响应系统(15)的响应曲线,其中(a)为同步误差响应曲线,(b)为主动控制器的能量消耗。
[0071]
图6是本发明具体实施例2中,主动控制器按照式(17)且tc=0.05的输入下驱动系统(14)和响应系统(15)的响应曲线,其中(a)为同步误差响应曲线,(b)为主动控制器的能量消耗。
具体实施方式
[0072]
下面结合附图,对本发明的技术方案进行具体说明。
[0073]
如图1所示,本发明一种忆阻神经网络预定时间同步能量消耗可调节的方法,包括如下步骤:
[0074]
步骤s1、基于忆阻神经网络,建立驱动系统和响应系统;
[0075]
步骤s2、根据步骤s1建立的驱动系统和响应系统,建立同步误差系统;
[0076]
步骤s3、基于控制器能量消耗公式,设计能量消耗可调节稳定性定理;
[0077]
步骤s4、基于步骤s2的同步误差系统和步骤s3的能量消耗可调节稳定性定理,设计能量消耗可调节主动控制器,进行能量消耗可调节的忆阻神经网络同步控制。
[0078]
步骤s1具体为:
[0079]
步骤s11、建立驱动系统的状态方程:
[0080]
[0081]
步骤s12、建立响应系统的状态方程:
[0082][0083]
式中,xi(t)与yi(t)表示第i个神经元的状态矢量;ci是一个常数,表示神经元的自我抑制速率;fj(*)为激活函数,且|fj(*)|≤mj,mj>0;ri表示系统的主动控制器,ii表示外部未知输入,p
ij
表示第i个神经元和第j个神经元之间的记忆连接权重,其表示为:
[0084][0085]
式中,yi>0,是忆阻切换信号,yi、pi′j、pi′j′
均为已知常数,i,j=1,2,...,n。
[0086]
步骤s2具体为:
[0087]
将驱动系统与响应系统的预定时间投影同步误差设定为:
[0088]ei
(t)=yi(t)-xi(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0089]
将上式进行求导,得到预定时间投影同步误差系统:
[0090][0091]
式中,ei(t)=(e1(t),e2(t),...,en(t))
t
。
[0092]
步骤s3具体为:
[0093]
步骤s31、控制器能量消耗的具体定义为:
[0094][0095]
其中ri是系统的主动控制器,ξi为系统的主动控制器ri的能量消耗;ξ是系统总的能量消耗;
[0096]
步骤s32、固定时间稳定的能量消耗:设计一个在[0,+∞)上连续且无界的函数v(x),并且满足:
[0097][0098]
其中常数满足α>0,β>0,0<p<1,稳定时间t
finite
的计算公式为:
[0099][0100]
其中x0为初始值,主动控制器设计为
[0101]
r=(αv
p
+β)
[0102]
根据公式(6)可知
[0103]
dv=(-αv
p-β)dt
[0104]
根据公式(5),得到
[0105][0106]
因此
[0107][0108]
步骤s33、预定时间稳定的能量消耗:设计一个在[0,+∞)上连续且无界的函数v(x),并且满足:
[0109]
(1)
[0110]
(2)tc是用户定义的预定义的时间参数;
[0111]
(3)对于任何v(x)>0,都存在常数α,β,p>0,由此:
[0112][0113]
其中
[0114][0115]
主动控制器设计为
[0116][0117]
根据公式(5),得到
[0118][0119]
其中:
[0120][0121]
得到
[0122][0123]
步骤s4具体为:
[0124]
步骤s41、预定时间主动控制器设计为:
[0125][0126]
其中sign()为符号函数,满足步骤s33常数α,β的定义;
[0127]
步骤s42、能量消耗可调节主动控制器设计为
[0128][0129]
其中α
max
=max{α1,α2,
…
,αn},β
max
=max{β1,β2,
…
,βn}满足步骤s33常数α,β的定义,如果cv>>tc,则有
[0130]
[0131]
其中
[0132][0133]
基于能量消耗公式,结合能量可调节主动控制器的能量消耗进行稳定性证明,控制器的能量消耗计算公式如下:
[0134][0135]
分三部分进行分析,第一部分:
[0136][0137]
第二部分:
[0138][0139]
第三部分:
[0140][0141]
结合上述三个部分,忆阻神经网络同步控制器的能量消耗上界为:
[0142][0143]
如果cv>>tc,则有
[0144][0145]
上述计算与本发明的假设相符,所以证明得到本发明的预定时间稳定理论是有效可行的。同样可以得到在其他需要进行能量控制,如机器人控制等情况,通过调整参数tc,可以实现多机器人之间同步的能量控制。
[0146]
特别的,为了更加直观的显示本发明提出的一种忆阻神经网络预定时间同步能量消耗可调节的方法的有效性和可行性,本发明使用matlab软件对此方法进行计算机仿真实验。
[0147]
具体实施例1:
[0148]
非线性系统方程为:
[0149][0150]
其中,参数取为:α=0.2,β=1.2,p=1.5,主动控制器设计为:
[0151]
r=-αsign(y(t))|y(t)|
p-βsign(y(t))
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0152]
由上所知,系统(11)为有限时间稳定系统,不同的初始条件下都可以实现有限时间稳定,如图2所示;不同初始条件对应的稳定时间与控制器的能量消耗如表1所示。
[0153]
表1不同初始值条件下的主动控制器能量消耗ξ
[0154]
初始值0.61.21.82.43有限时间0.50.81.11.41.7能量消耗4.152.251.000.330.05
[0155]
主动控制器设计为:
[0156][0157]
由上所知,系统(11)为时间可调节稳定系统。图3为取相同初始值下取不同的预定时间tc条件下,系统(11)也能够实现预定时间稳定,不同tc对应的实际稳定时间与控制器的能量消耗如表2所示。
[0158]
表2不同tc条件下的主动控制器能量消耗ξ
[0159]
tc24101420有限时间1.73.38.311.716.7能量消耗412920.58.24
[0160]
具体实施例2:
[0161]
驱动系统的状态方程为:
[0162][0163]
其中,驱动系统为3维混沌系统,参数设置为:c1=c2=c3=2,外部参数设置为:i1=sin(0.6t),i2=sin(0.4t),i3=sin(0.8t),激活函数设置为:f1(x1)=1.34/tanh(x1),f2(x2)=1.96sin(x2),f3(x3)=-2.35tanh(x3);连接权重定义为:
[0164][0165][0166][0167]
响应系统的状态方程为:
[0168][0169]
其中,响应系统为3维混沌系统,f1(y1)=f1(x1),f2(y2)=f2(x2)f3(y3)=f3(x3),m1=l1=1.34,m2=l2=1.96,m3=l3=2.35。驱动-响应系统的投影误差设定为:
[0170]ei
(t)=yi(t)-xi(t);
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0171]
把时间可调节稳定理论应用在同步控制上,其主动控制器设计为:
[0172][0173]
控制器参数设置为:α1=10,α2=17,α3=8,β1=5,β2=6,β3=4,p=1。
[0174]
图4,图5,图6为取相同初始值下取不同的预定时间tc条件下,系统(16)也能够实现预定时间稳定,不同tc对应的实际稳定时间与控制器的能量消耗如表3所示。
[0175]
表3不同tc条件下的主动控制器能量消耗ξ
[0176][0177]
图4(a)是在tc=0.02下同步误差响应曲线。在图4(a)中,系统在0.015s处收敛到零。图4(b)是在tc=0.02下控制器能量消耗曲线。图5(a)是在tc=0.05下同步误差响应曲线。在图5(a)中,系统在0.043s处收敛到零。图5(b)是在tc=0.05下控制器能量消耗曲线。图6(a)是在tc=0.1下同步误差响应曲线。在图6(a)中,系统在0.08s处收敛到零。图6(b)是在tc=0.1下控制器能量消耗曲线。实验结果表明,本发明所提方法能够根据实际应用需求进行控制器能量消耗的调节,并建立起能量消耗与系统稳定时间的显式关系,通过调节参数tc,能够实现控制器能量消耗的实时调节。
[0178]
以上所述,仅是本发明的较佳实施例而已,并非是对本发明作其它形式的限制,任何熟悉本专业的技术人员可能利用上述揭示的技术内容加以变更或改型为等同变化的等效实施例。但是凡是未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与改型,仍属于本发明技术方案的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1