一种特征增强的非侵入式负荷分解方法
1.本发明涉及电力负荷分析技术领域,具体为一种特征增强的非侵入式负荷分解方法。
背景技术:
2.非侵入式负荷分解,是通过对某一特定区域的总电表数据进行分析,从而获取该范围内各用电负荷的用电情况及能耗数值。相对于传统侵入式负荷分解方式,非侵入式负荷分解不需要为用户的每个用电设备安装测量装置便能获取各个用电设备的运行情况。一方面节省了传感设备的购置费用,另一方面免去了对现有用电设备线路逐一改造及维护的麻烦,是一种便捷、成本低、通用性强的方式。
3.非侵入式负荷分解对于各用电参与方都有很大的实用价值。对于普通用户而言,有助于引导用户合理用电,从而实现节能降耗,节省电费开支;对于电力公司而言,非侵入式负荷分解能提高电网的安全性及经济性,还有助于更精准地对用户行为进行建模,实现对用户的差异化、精准化服务;对于用电设备制造商,非侵入式负荷分解所提供的设备状态及对应的能耗信息,能够为设备故障诊断提供依据,从而对设备进行维护。
4.然而传统的非侵入式负荷分解方法存在运算量大,训练特征单一,精准推理困难,非线性学习能力低的问题,导致负荷分解精度不高。目前这一领域的研究还未成熟,技术不够完善,因此它还有很大的提升的空间。
技术实现要素:
5.为了解决上述背景涉及的问题,本发明所使用的技术方案是:一种特征增强的非侵入式负荷分解方法,包括以下步骤:
6.步骤一,负荷数据采集:采集一段时间内总负荷和各用电负荷的有功功率数据,构建原始数据集;
7.步骤二,数据预处理:对原始数据集中的总负荷和各用电负荷数据缺失值进行填充并归一化;
8.步骤三,特征增强:对步骤二预处理后的总负荷有功功率序列构造增强特征;
9.步骤四,特征拼接:将原始特征和步骤三构造的增强特征进行拼接,形成多维特征序列;
10.步骤五,构建用电负荷分解模型:将步骤四得到的多维特征序列作为输入,以各用电负荷有功功率序列作为输出,对深度神经网络模型进行训练,得到各用电负荷对应的分解模型;
11.步骤六,用电负荷分解:将总负荷有功功率序列按步骤三和步骤四进行特征增强与特征拼接,形成多维特征序列输入步骤五构建的各用电负荷分解模型,得到分解后的各用电负荷有功功率序列。
12.上述特征增强的非侵入式负荷分解方法,所述步骤二中数据归一化方法为:
[0013][0014]
其中,xi表示用电负荷在时刻i的有功功率值,x
max
表示用电负荷时间序列中的最大有功功率值,表示用电负荷在时刻i归一化后的有功功率值。
[0015]
上述特征增强的非侵入式负荷分解方法,所述步骤三的特征增强的具体步骤为:
[0016]
通过处理用电负荷窗口数据对步骤二预处理后的总负荷有功功率序列构造新特征。特征增强包括滞后特征,或滑动窗口特征,或扩展窗口特征,或几种特征的组合。
[0017]
构建滞后特征是时间序列预测问题转化为监督学习问题的经典方式,其中滞后特征的滞后值由自相关分析确定。在本发明中,通过自相关分析,发现相隔一个时间步的特征相关性最高,因此滞后值设为1。
[0018]
滑动窗口特征使用先前时间观察值的统计信息作为特征,滑动窗口的值由用电负荷的类型和自相关性共同决定。在本发明中,不同用电负荷设置的滑动窗口大小不同。
[0019]
扩展窗口特征不同于滑动窗口特征,相比滑动窗口特征的窗口大小是恒定的,而扩展窗口特征则考虑了用电负荷所有历史值。每一步,扩展窗口的大小都会增加,它考虑了序列中的每个新加入的值。
[0020]
上述特征增强的非侵入式负荷分解方法,所述步骤四的特征拼接的具体步骤为:
[0021]
经过步骤二处理后的数据集有两列,第一列为时间,第二列为对应的归一化后的有功功率,现在新增第三列数据,并把第三列的值设置为每一行的总负荷有功功率减去该行上一行总负荷有功功率得到的值。设置一个长度为n的滑动窗口,给定长度为l的输入序列x=(x1,x2,
···
,xi,
···
,x
l
),xi为第i个时间点总负荷有功功率,在输入序列的开始和结束处各用长度为和的零值进行填充。输入是一个处理后的长度为n的主负荷窗口h
i:i+n-1
,hi=(xi,x
i-x
i-1
),输出是各对应负荷窗口的中点元素为用电负荷j被分解出的第k个时间点的有功功率,其中输入序列维度为(l,n,2),输出序列维度为(l,1)。
[0022]
上述特征增强的非侵入式负荷分解方法,所述步骤五对各用电负荷分别训练相应的负荷分解模型的具体步骤为:
[0023]
设置一个长度为n的滑动窗口,神经网络模型第一层输入层维度为(n,2);第二层和第三层为一维卷积层,由16个长度为4的卷积核构成,卷积步长为1,激活函数为linear函数,填充值设置为same;第四层为最大池化层,池化窗口的大小设置为2;第五层为lstm层,输出的维度是128,返回序列设置为true,返回状态设置为false;第六层为扁平层,把多维的输入“压平”为一维;第七层和第八层为全连接层,第七层输出的维度为128,激活函数为tanh函数,第八层即输出层,输出的维度为1,激活函数为linear函数;最终选取损失函数mse和优化器adam对网络模型进行训练。
附图说明
[0024]
下面结合附图和实施例对本发明进一步说明。
[0025]
图1为本发明的流程图。
[0026]
图2为具体实施方式中所采用的深度神经网络模型结构示意图。
[0027]
图3为本发明提出的特征增强的示意图。
具体实施方式
[0028]
下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述。
[0029]
根据图1,本发明公开了一种特征增强的非侵入式负荷分解方法,具体包括以下步骤:
[0030]
步骤一:负荷数据采集
[0031]
本实施例选取水壶,冰箱,洗衣机,微波炉,洗碗机五种典型电器进行负荷分解。这其中既包括简单的开关型电器如水壶,也包括复杂的多状态型电器,如冰箱、洗衣机、微波炉、洗碗机。总负荷有功功率为这五种电器以及其余电器的有功功率累加,即p
总
=p
水壶
+p
冰箱
+p
洗衣机
+p
微波炉
+p
洗碗机
+p
其它电器
。按6秒一个时间点,采集2013年10月1日到2014年1月10日这五种电器的有功功率以及总有功功率数据。把2013年10月1日到2014年12月31日的数据作为训练集,共1324800个时间点;把2014年1月1日到2014年1月10日的数据作为测试集,共144000个时间点。
[0032]
步骤二:数据预处理
[0033]
对于总负荷和各用电负荷的有功功率缺失值,使用pandas的fillna方法,参数选择ffill,即用前一个非缺失值去填充该缺失值。然后对填充好的数据进行归一化操作,归一化公式为:
[0034][0035]
其中,xi表示用电负荷在时刻i的有功功率值,x
max
表示用电负荷时间序列中的最大有功功率值,表示用电负荷在时刻i归一化后的有功功率值。
[0036]
步骤三:特征增强
[0037]
特征增强包括滞后特征,或滑动窗口特征,或扩展窗口特征,或几种特征的组合。
[0038]
构建滞后特征:在本发明中,自相关分析后,相隔一个时间步的特征相关性最高,故滞后值设为1。经过步骤二处理好的数据集有两列,第一列为时间,第二列为对应的归一化后的有功功率,现在新增第三列数据,并把第三列的值设置为每一行的有功功率减去该行上一行有功功率得到的值;
[0039]
构建滑动窗口特征:在本发明中,不同用电负荷设置的滑动窗口的值不同。针对某一特定用电负荷,设置一个长度为n的滑动窗口,滑动步幅设为1,给定长度为l的输入序列x=(x1,x2,
···
,xi,
···
,x
l
),xi为第i个时间点总负荷有功功率。本发明模型为序列到点模型,对于序列开始和末尾的时间点,通过在输入序列的开始和结束处各用长度为和的零值进行填充,使所述功率点能够组成完整的滑窗,并且这些功率点恰好位于滑窗的中部;
[0040]
构建扩展窗口特征:不同于滑动窗口特征,在滑动窗口的特征下,窗口的大小是恒定的,扩展窗口特征考虑了所有过去的值。每一步,扩展窗口的大小都会增加,它考虑了序列中的每个新加入的值。
[0041]
本发明采用的特征增强为滞后特征和滑动窗口特征的组合,但本发明创造的保护范围并不局限于此,包括滞后特征,或滑动窗口特征,或扩展窗口特征,或几种特征的组合。
[0042]
步骤四:特征拼接
[0043]
将原始特征和步骤三构造的新特征进行拼接,形成多维特征序列。
[0044]
具体如图3所示,设置一个长度为n的滑动窗口,以6秒为一个时间点,给定长度为l的输入序列x=(x1,x2,
···
,xi,
···
,x
l
),xi为第i个时间点总负荷有功功率,为用电负荷j被分解出的第k个时间点有功功率。每次的输入都是一个长度为n拥有两维特征的总负荷有功功率窗口h
i:i+n-1
,即hi=(xi,x
i-x
i-1
),hi由第i个时间点的总负荷有功功率与第i个时间点总负荷有功功率减去第i-1个时间点总负荷有功功率的差值这两个特征组成。输出是用电负荷j对应主负荷窗口的中点元素其中其中的值由长度为n的总负荷有功功率窗口h
i:i+n-1
中的所有值共同决定。输入序列维度为(l,n,2),输出序列维度为(l,1)。
[0045]
步骤五:构建用电负荷分解模型
[0046]
将步骤三和步骤四构造好的总负荷有功功率及相隔时间点总负荷有功功率差值序列作为输入,把2013年10月1日到2013年12月31日的数据作为训练集,分别以水壶,冰箱,洗衣机,微波炉,洗碗机的有功功率作为输出,用图2所示深度神经网络模型进行训练,其中第一层是输入层;第二层和第三层是cnn层;第四层是最大池化层;第五层是lstm层;第六层是扁平层;第七层和第八层是全连接层,且第八层是输出层。具体参数设置为:
[0047]
设置一个长度为n的滑动窗口,神经网络模型第一层输入层维度为(n,2);第二层和第三层为一维卷积层,由16个长度为4的卷积核构成,卷积步长为1,激活函数为linear函数,填充值设置为same;第四层为最大池化层,池化窗口的大小设置为2;第五层为lstm层,输出的维度是128,返回序列设置为true,返回状态设置为false;第六层为扁平层,把多维的输入“压平”为一维;第七层和第八层为全连接层,第七层输出的维度为128,激活函数为tanh函数,第八层即输出层,输出的维度为1,激活函数为linear函数;最终选取损失函数mse和优化器adam对网络模型进行训练。分别训练得到水壶,冰箱,洗衣机,微波炉,洗碗机的负荷分解模型。
[0048]
步骤六:用电负荷分解
[0049]
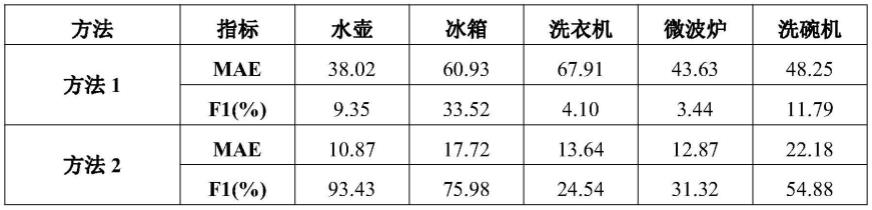
以2014年1月1日到2014年1月10日的数据作为测试集,分别对水壶,冰箱,洗衣机,微波炉,洗碗机五种用电负荷进行分解。用本发明方法的非侵入式负荷分解结果,与其他经典的非侵入式负荷分解方法结果进行对比,如下表所示。评价指标包括mae平均绝对误差和f1分数。
[0050]
表1
[0051]
[0052][0053]
以上结果表明本发明方法有效提高了非侵入式负荷分解精度。
[0054]
方法1来源:batra n,kelly j,parson o,et al.nilmtk:an open source toolkit for non-intrusive load monitoring[c]//proceedings of the 5th international conference on future energy systems.2014:265-276.
[0055]
方法2来源:bonfigli r,felicetti a,principi e,et al.denoising autoencoders for non-intrusive load monitoring:improvements and comparative evaluation[j].energy and buildings,2018,158:1461-1474.
[0056]
方法3来源:zhang c,zhong m,wang z,et al.sequence-to-point learning with neural networks for non-intrusive load monitoring[c]//proceedings of the aaai conference on artificial intelligence.2018,32(01):2604-2611.
[0057]
方法4来源:shin c,joo s,yim j,et al.subtask gated networks for non-intrusive load monitoring[c]//proceedings of the aaai conference onartificial intelligence.2019,33(01):1150-1157.
[0058]
方法5来源:chen k,zhang y,wang q,et al.scale-and context-aware convolutional non-intrusive load monitoring[j].ieee transactions on power systems,2019,35(3):2362-2373.
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1