相机数据质量的检测方法、装置及电子设备与流程
本发明涉及相机,具体涉及相机数据质量的检测方法、装置及电子设备。
背景技术:
1、在生产使用深度相机等三维空间感知的传感器的设备时,需要对这些设备所测得的相机数据质量进行检测,避免由于相机出厂质量问题、工厂安装,例如固定结构使相机变形、镜片安装不合格等问题导致的相机数据质量问题,影响到后续产品使用。
2、现有的检测方法一般是通过人工检测的方法,例如,获取固定物体的点云数据,通过查看点云数据距离和形状是否复合期望,判断相机数据质量是否合格。然而,此方法依赖人工的主观判断,不具备一致性,并且效率低下。
技术实现思路
1、有鉴于此,本发明实施例提供了一种相机数据质量的检测方法、装置及电子设备,以解决相机数据质量的检测方法不具备一致性且效率低的问题。
2、根据第一方面,本发明实施例提供了一种相机数据质量的检测方法,包括:
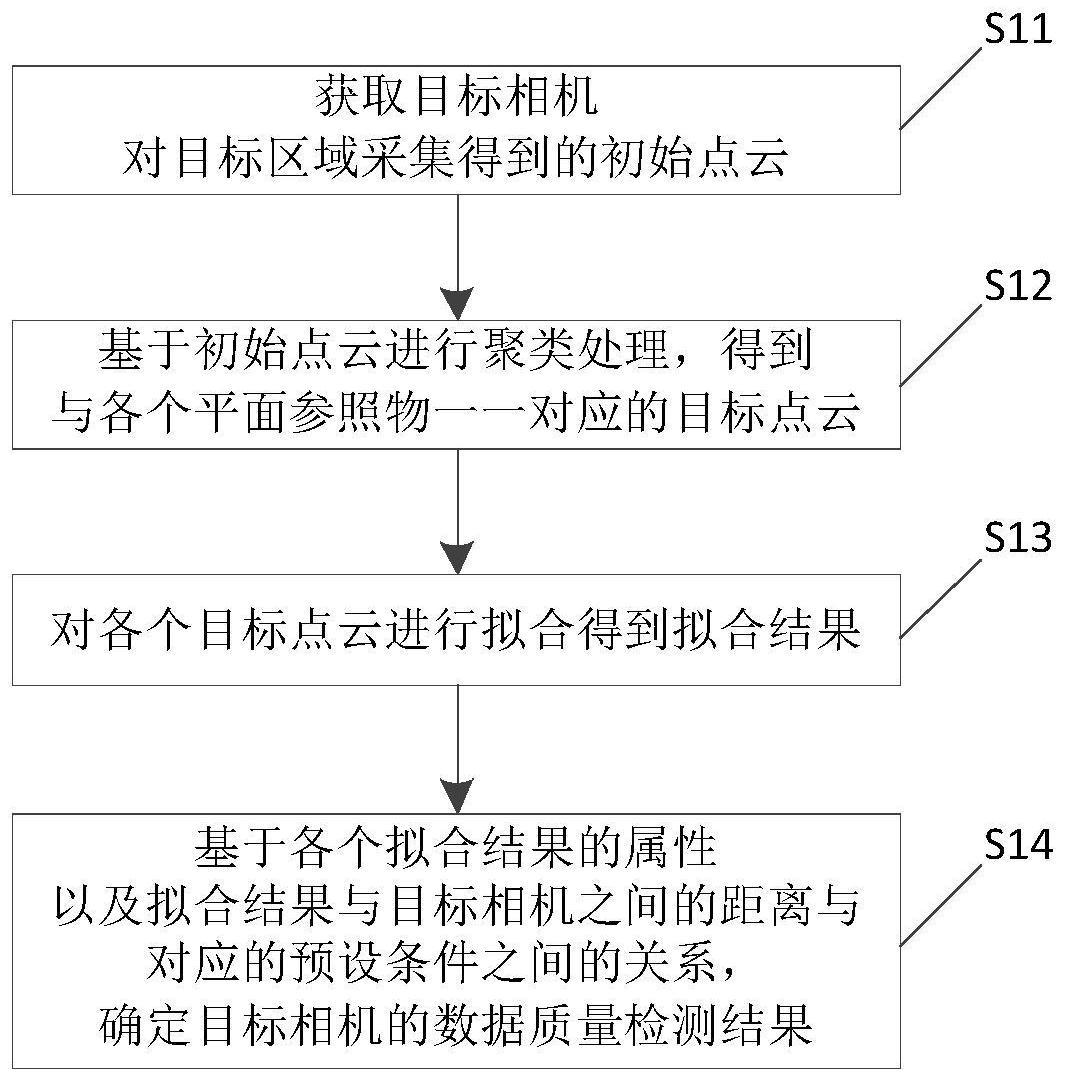
3、获取目标相机对目标区域采集得到的初始点云,所述目标区域包括至少一个平面参照物;
4、基于所述初始点云进行聚类处理,得到与各个所述平面参照物一一对应的目标点云;
5、对各个所述目标点云进行拟合得到拟合结果;
6、基于各个所述拟合结果的属性以及所述拟合结果与所述目标相机之间的距离与对应的预设条件之间的关系,确定所述目标相机的数据质量检测结果,所述预设条件是基于所述平面参照物与所述目标相机之间的关系确定的。
7、本发明实施例提供的相机数据质量的检测方法,通过对初始点云进行聚类处理,得到与各个平面参照物对应的目标点云,再通过对目标点云进行拟合得到拟合结果,利用拟合结果与平面参照物的实际布置情况进行数据的检测,其中,拟合结果的属性用于检测数据畸变,距离用于检测距离误差,基于这两个方面能够实现对相机数据质量进行可靠的检测,提高了检测效率。
8、结合第一方面,在第一方面第一实施方式中,所述基于所述初始点云进行聚类处理,得到与各个所述平面参照物一一对应的目标点云,包括:
9、获取所述平面参照物在所述目标相机的相机坐标系中的高度范围;
10、基于所述高度范围对所述初始点云进行过滤处理,得到第一点云;
11、基于所述第一点云进行聚类处理,得到与各个所述平面参照物一一对应的目标点云。
12、本发明实施例提供的相机数据质量的检测方法,利用平面参照物在相机坐标系中的高度范围对初始点云进行过滤,使得平面参照物的所有点云均在目标点云中且排除了无关点云,一方面减少了数据处理量,另一方面保证了所得到的目标点云的可靠性。
13、结合第一方面第一实施方式,在第一方面第二实施方式中,所述基于所述第一点云进行聚类处理,得到与各个所述平面参照物一一对应的目标点云,包括:
14、将所述第一点云投影至所述目标相机的光轴所在平面,得到第二点云;
15、基于所述第二点云进行聚类处理,得到与各个所述平面参照物一一对应的目标点云。
16、本发明实施例提供的相机数据质量的检测方法,将第一点云进行投影将三维的第一点云映射为二维的第二点云,以便于后续的直线拟合,保证了直线拟合的可靠性。
17、结合第一方面第二实施方式,在第一方面第三实施方式中,所述基于所述第二点云进行聚类处理,得到与各个所述平面参照物一一对应的目标点云,包括:
18、对于所述第二点云中的各个当前数据点,统计所述第一点云的其他数据点中与所述当前数据点之间的距离小于预设距离的数量;
19、当所述数量小于预设数量时,将所述当前数据点从所述第二点云中去除,以得到第三点云;
20、对所述第三点云进行聚类处理,得到与各个所述平面参照物一一对应的目标点云。
21、本发明实施例提供的相机数据质量的检测方法,通过对第二点云进行离散点的去除,能够去除异常点得到准确的第三点云,保证了所得到的目标点云的准确性。
22、结合第一方面,或第一方面第一实施方式至第三实施方式中任一项,在第一方面第四实施方式中,当所述目标点云为所述目标相机的光轴所在平面上的点云时,所述对各个所述目标点云进行拟合得到拟合结果,包括:
23、对各个所述目标点云进行直线拟合,得到各个所述目标点云对应的拟合直线。
24、本发明实施例提供的相机数据质量的检测方法,在映射至光轴所在平面上时,对目标点云进行直线拟合,简化了数据处理,提高了检测效率。
25、结合第一方面第四实施方式,在第一方面第五实施方式中,所述基于各个所述拟合结果的属性以及所述拟合结果与所述目标相机之间的距离与对应的预设条件之间的关系,确定所述目标相机的数据质量检测结果,包括:
26、获取各个所述拟合直线的斜率;
27、计算各个所述拟合直线到所述目标相机之间的第一距离;
28、当所述斜率以及所述第一距离均满足对应的预设条件时,确定所述目标相机的数据质量合格。
29、本发明实施例提供的相机数据质量的检测方法,当斜率以及第一距离均满足相应预设条件时,表示点云数据畸变情况满足要求,并且测距误差满足要求,从两个方面进行了相机数据质量的检测。
30、结合第一方面第五实施方式,在第一方面第六实施方式中,所述基于各个所述拟合结果的属性以及所述拟合结果与所述目标相机之间的距离与对应的预设条件之间的关系,确定所述目标相机的数据质量检测结果,还包括:
31、获取与各个所述拟合直线对应的目标点云;
32、对于所述目标点云中的各个目标数据点,计算所述目标数据点与对应的所述拟合直线之间的第二距离;
33、当所述斜率、所述第一距离以及所述第二距离均满足对应的预设条件时,确定所述目标相机的数据质量合格。
34、本发明实施例提供的相机数据质量的检测方法,通过第二距离进行判断,当第二距离满足对应的预设条件时表示相机距离噪声满足要求,从而对相机数据的质量进行了进一步的检测,进一步有提高了检测结果的可靠性。
35、根据第二方面,本发明实施例还提供了一种相机数据质量的检测装置,包括:
36、获取模块,用于获取目标相机对目标区域采集得到的初始点云,所述目标区域包括至少一个平面参照物;
37、聚类模块,用于基于所述初始点云进行聚类处理,得到与各个所述平面参照物一一对应的目标点云;
38、拟合模块,用于对各个所述目标点云进行拟合得到拟合结果;
39、确定模块,用于基于各个所述拟合结果的属性以及所述拟合结果与所述目标相机之间的距离与对应的预设条件之间的关系,确定所述目标相机的数据质量检测结果,所述预设条件是基于所述平面参照物与所述目标相机之间的关系确定的。
40、根据第三方面,本发明实施例提供了一种电子设备,包括:存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行第一方面或者第一方面的任意一种实施方式中所述的相机数据质量的检测方法。
41、根据第四方面,本发明实施例提供了一种计算机可读存储介质,所述计算机可读存储介质存储计算机指令,所述计算机指令用于使所述计算机执行第一方面或者第一方面的任意一种实施方式中所述的相机数据质量的检测方法。
42、需要说明的是,本发明实施例提供的相机数据质量的检测装置、电子设备及计算机可读存储介质的相应有益效果,请参见上文相机数据质量的检测方法中对应有益效果的描述,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!