一种具备握力感知的XR手柄及控制方法与流程
一种具备握力感知的xr手柄及控制方法
技术领域
1.本发明涉及一种xr(vr、ar、mr的统称)手柄,还涉及一种基于所述手柄的控制方法。
背景技术:
2.现代社会已经越来越提倡让孩子尽可能去做一些力所能力的家务。一般在小学一到二年级,甚至幼儿园期间,就会开展让孩子做一道自己的拿手菜的活动。虽然开展这些活动时,父母会全程陪伴。但难免还是会经历很多心惊肉跳的瞬间,特别是在孩子比较任性,不注意听指挥时,父母往往因为担心孩子会被刀伤到,被油、锅烫到,而高度紧张,此时非常容易出现亲子冲突,给孩子留下不良印象。如果孩子再遭遇切手、油锅起火、被油花溅到等意外,可能还会留下阴影,不愿再尝试这种厨房家务,势必会与开展这项活动的目的背道而驰。如是有些厂家推出了vr厨房项目,受训者可以在这种虚拟场景中进行各种操作,将厨房家务当游戏来体验,给进入真实厨房一个过渡。项目推出,受到很多家长和小朋友的欢迎。但上述项目依然存在如下缺点:
3.当前开发的产品还是基于厂家配套的手柄来实现内容的交互。而这些手柄由于大部分动作通过操作手柄的按钮实现,不仅操作方式单一,而且与厨房的实操情况不符,甚至在某些场景中,如对象体积小并集中放置时,非常容易出现拿错东西的情况,导致用户的体验感受大打折扣。
技术实现要素:
4.本发明所要解决的第一个技术问题是,提供一种具备握力感知的xr手柄。
5.本发明第一个技术问题通过如下技术方案解决:一种具备握力感知的xr手柄,包括拱形的弹力橡胶,用于套装在人手虎口位置的手掌套,该手掌套包括底座和连于所述底座左右两侧可调节所述手掌套圈径的调节带,所述弹力橡胶的两端分装在所述底座前端面的左右两侧,所述弹力橡胶的前端面设有四个手指凹槽,后端面中部连接有一标尺光栅,该标尺光栅后端从所述底座前端面相对位置处的开孔插入所述底座的内腔,与所述底座内腔中的光栅读数头组成用以记录所述弹力橡胶移动的方向和幅度的光栅尺,所述手柄还包括信号采集电路,所述信号采集电路与所述光栅读数头相连,用于采集数据并通过有线或无线的方式传送出去。
6.所述标尺光栅设置在一弹簧内,该弹簧两端分别与所述弹力橡胶和底座相连,弹簧用于保护所述标尺光栅免受外界的物理破坏。
7.所述标尺光栅的前端与一固定板后端面的中部相连,整体构成一个t字形,所述固定板沿着长度方向嵌入或埋在所述弹力橡胶内,让标尺光栅更好的与弹力橡胶的运动同步。
8.所述固定板后端面和所述底座的前端面上均凸出的设置有圆环或圆台,所述弹簧的两端套装在所述圆环或圆台上,所述标尺光栅设置在所述圆环或圆台内。
9.所述底座前端面上凸出设置的圆台上的开孔与所述标尺光栅配合,构成所述标尺光栅直线运动的导轨。
10.所述底座在与人手拇指对应侧的端面上设有拇指凹槽,该凹槽处,或该凹槽的左右侧或上方的相近位置,一左一右一共排布有两个按键,它们的信号输出端与所述信号采集电路相连。
11.所述弹力橡胶的两端插入所述底座内并由径向设置的螺栓固定。
12.本发明所要解决的第二个技术问题是,提供一种基于所述手柄的控制方法。
13.本发明解决其第二个技术问题的方案如下:一种控制方法,该控制方法基于vr系统实施,该系统包括服务器、vr眼镜和两所述手柄,vr眼镜和两所述手柄均与所述服务器联机,所述服务器中预设有vr场景,该控制方法包括如下步骤:
14.当所述手柄进入在所述vr场景中定义的区域1后,根据所述手柄的当前位置,所述服务器先为其预选定一个对象1,然后等待接收指示:
15.在用户操作左按键时,将当前选定对象切换为对象2,对象2位于对象1的左侧;
16.在用户操作右按键时,将当前选定对象切换为对象3,对象3位于对象1的右侧;
17.在收到握力信号后,确认当前选定对象为目标对象,将所述目标对象附着在所述手柄上,并在所述握力信号消失后,释放所述目标对象。
18.上述控制方法在用于如厨房的刀具区这种操作对象小又非常密集的场合时,能很好解决难以准确捕捉目标对象,容易拿错的问题。在目标对象选择确认上,上述控制方法采用握持手柄时选中拿起,松开手柄时释放,不仅操作便捷而且真实的还原了现实中的操作情景。
19.所述控制方法,还进一步包括如下步骤:
20.根据对象质量的不同,设定不同的握力阈值,在所述手柄的握力达到目标对象对应的握力阈值时,才能拿起该对象。
21.在面对厨房中如水桶这类对象时,虽不易出现目标对象难以准确捕捉的问题,但实际生活中,对满桶水、半桶水或空桶,操作提起需要施于的力度是不同的,本发明根据不同质量的对象,设定不同的握力阈值,使用户在提起这些对象时,需要施于不同的握力,增加了握力控制的层次,同时又进一步提升了用户体验的真实性。
22.所述控制方法还可扩展如下:
23.根据操作对象类别的不同,设定不同的左右手配合规则:
24.当切割蔬菜时,左手柄握力需达到阈值a1,才能稳定扶持,右手柄握力需达到阈值a2才能有效切割;
25.当切割肥肉时,左手柄握力需达到阈值b1,才能稳定扶持,右手柄握力需达到阈值b2才能有效切割,b1》a1,b2》a2;
26.当剁骨头时,左手柄握力需达到阈值c1,才能稳定扶持,当右手柄握力达到阈值c2,且左手柄握力消失后,才能有效剁骨头,c2》b2。
27.该控制方式,表面上看逻辑较为复杂,但实际与人们进行相应操作时的生活习惯高度相符,人们能很快掌握这些规则,体会握力控制的层次,给握力控制带来丰富的体验。同时,该控制方式,通过规则约束用户规范操作,有利于减少实际生活中的意外(剁骨头时剁到手)。
28.有益效果:
29.1)本发明手柄结构和控制方式简单,以握力信号为主要信号输出类型;
30.2)本发明控制方法能很好解决难以准确捕捉目标对象,容易拿错的问题;
31.3)本发明控制方法,根据对象质量的不同,设定了不同的握力阈值,增加了握力控制的层次,有利于提升用户体验的真实性;
32.4)本发明控制方法,与人们进行相应操作时的生活习惯高度相符,使人们无需刻意去记忆手柄的各种操作规则,而是更多的根据自己的生活习惯来操作,可获得更好的游戏体验。
附图说明
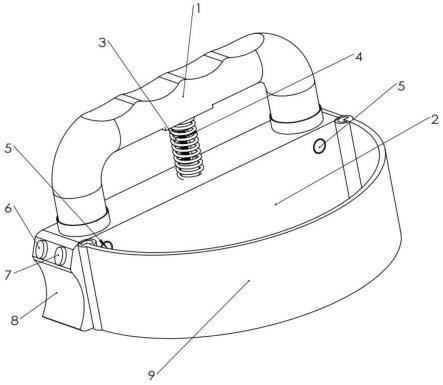
33.图1为本发明较佳实施例的具备握力感知的xr手柄的结构示意图;
34.图2为图1中光栅读数头和弹簧的安装方式示意图;
35.图3为底座上与标尺光栅配合的开孔的结构。
具体实施方式
36.图1为本发明较佳实施例的具备握力感知的xr手柄的结构示意图。如图1所示,该具备握力感知的xr手柄包括拱形的弹力橡胶1,用于套装在人手虎口位置的手掌套,该手掌套包括底座2和连于底座2左右两侧可调节手掌套圈径的调节带9。本实施例中,调节带9采用具有弹性的橡胶带。弹力橡胶1的两端分别插入底座2前端面的左右两侧,并由螺栓5穿过紧固。弹力橡胶1的前端面设有四个手指凹槽,后端面中部连接有一标尺光栅4,标尺光栅4后端从底座2前端面相对位置处(与弹力橡胶1后端面中部相对)的开孔插入底座2的内腔,与底座2内腔中的光栅读数头组成光栅尺,用以记录弹力橡胶1移动的方向和幅度。标尺光栅4设置在弹簧3内。弹簧3两端分别与弹力橡胶1和底座2相连。弹簧3用于保护标尺光栅4免受外界的物理破坏。所述手柄还包括信号采集电路(未画出),所述信号采集电路与所述光栅读数头相连,用于采集数据并通过无线如蓝牙的方式传送出去。当然,也可以选择有线方式来传送数据。
37.底座2在与人手拇指对应侧的端面上设有拇指凹槽8,凹槽的上方的相近位置,一左一右一共排布有两个按键6和7,它们的信号输出端与所述信号采集电路相连。按键6和7还可以直接设置在凹槽8位置处,只是需要注意意外按压的情况,也可以设置在凹槽8的左右侧。
38.图2为图1中光栅读数头和弹簧的安装方式示意图。标尺光栅4的前端与一固定板11后端面的中部相连,整体构成一个t字形。固定板11沿着长度方向(长边沿着手指凹槽排列的方向)嵌入或埋在弹力橡胶1内,让标尺光栅4更好的与弹力橡胶1的运动同步。固定板1后端面和底座2的前端面上均凸出的设置有圆环或圆台22(两端面上的结构可以不一样),弹簧3的两端套装在所述圆环或圆台22上。标尺光栅4的两端位于所述圆环或圆台22内。
39.当手握手柄使弹力橡胶1发生变形后,标尺光栅4会跟随移动。底座2内的光栅读数头便可以计算出移动的方向和距离,从而可以判断出手的握紧程度。
40.为了让标尺光栅4能更好的做直线往复运动,底座前端面上选择圆台设计,如图3所示,该圆台22上的开孔23与标尺光栅4配合,构成标尺光栅4直线运动的导轨。开孔23为一
方形通道。标尺光栅4横截面呈“工”字形,如图2所示,包括中间的光栅面41和两侧凸出设计的边缘42,该边缘42与所述方形通道滑动配合的同时,隔离开光栅面41以对其形成保护。装置上面的左右按钮可以根据需求设计不同的功能。如根据短按和长按的方式不同,定义不同的功能。
41.本发明还提供一种生活厨房vr场景控制方法,该方法基于生活厨房vr系统实施,该系统包括服务器、vr眼镜和两所述手柄,vr眼镜和两所述手柄均与所述服务器联机,所述服务器中预设有生活厨房vr场景。该控制方法包括如下步骤:
42.当所述手柄进入在所述vr场景中定义的区域1后,根据所述手柄的当前位置,所述服务器先为其预选定一个对象1,此时在vr场景中可表现为对象1位置上升,以体现预选定状态,然后等待接收指示:
43.在用户操作左按键时,将当前选定对象切换为对象2,对象2位于对象1的左侧;
44.在用户操作右按键时,将当前选定对象切换为对象3,对象3位于对象1的右侧;
45.在收到握力信号后,确认当前选定对象为目标对象,将所述目标对象附着在所述手柄上,并在所述握力信号消失(握力未达到阈值)后,释放所述目标对象。
46.上述控制方法可应用在如下场景中:
47.区域1——刀具区的操作:由于刀具往往集中放置,体型又不大,难以准确捕捉手进入该区域后真正想拿取的对象,非常容易拿错。为此,当手进入该区域后,先根据其位置由服务器为其预选定一个对象,然后用户可通过大拇指点按手柄上的左右按扭来准确选取刀具,选好后,再握下手柄的弹力橡胶,实现将刀具拿到手上的操作,若期间手松开,刀具则掉落地上。
48.可见,上述控制方法在用于操作对象小又非常密集的场合时,能很好的解决难以准确捕捉目标对象,容易拿错的问题。另外,上述控制方法在目标对象选择确认上,采用握持手柄时选中拿起,松开手柄时直接释放,不仅操作便捷而且真实的还原了现实中的操作情景。
49.当然,本发明上述控制方法也不限于仅应用在生活厨房vr场景中,只要针对操作对象小又非常密集的场合,均可考虑采用本发明控制方法。
50.所述控制方法,还包括如下步骤:
51.根据对象质量的不同,设定不同的握力阈值,在所述手柄的握力达到目标对象对应的握力阈值时,才能拿起该目标对象。
52.上述控制方法可应用在如下场景中:
53.水桶的操作:水桶对象较大,可以不用手柄的左右按键来配合选取,但在水桶里面的水量不一样时,所需的力应是不一样的。也即,想要提起满桶或半桶水的水桶时,需要施于不同的握力才行。
54.该控制方法根据不同质量的对象,设定不同的握力阈值,使用户在提起这些对象时,需要施于不同的握力,增加了握力控制的层次,同时又进一步提升了用户游戏体验的真实性。
55.上述控制方法也可扩展到有类似需求领域中应用。
56.所述控制方法,还包括如下步骤:
57.根据操作对象类别的不同,设定不同的左右手配合规则:
58.当切割蔬菜时,左手柄握力需达到阈值a1,才能稳定扶持,右手柄握力需达到阈值a2才能有效切割;
59.当切割肥肉时,左手柄握力需达到阈值b1,才能稳定扶持,右手柄握力需达到阈值b2才能有效切割,b1》a1,b2》a2;
60.当剁骨头时,左手柄握力需达到阈值c1,才能稳定扶持,当右手柄握力达到阈值c2,且左手柄握力消失后,才能有效剁骨头,c2》b2。
61.该控制方式,与人们进行相应操作时的生活习惯高度相符,实际上,人们无需特别去记忆手柄的操作规则,根据自身的生活经验即可在不知不觉中完成手柄的操控,从而获得更好的游戏体验。同时,该控制方式,通过规则约束用户规范操作,有利于减少实际生活中的意外(剁骨头时剁到手)。
62.本发明控制手柄结构、操作简单。本发明控制方法,在用于操作对象小又非常密集的场合时,能很好的解决难以准确捕捉目标对象,容易拿错的问题。同时,本发明控制方法与人们进行相应操作时的生活习惯高度相符,使人们无需特别去记忆手柄的操作规则,能更容易让用户有身临其境的感受。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1