一种多机制自适应的眼底图像分割方法
1.本发明属于人工智能医学图像处理领域,具体涉及一种基于faster r-cnn的多机制自适应眼底图像分割方法。
背景技术:
2.青光眼是一种不可逆转的致盲性眼底疾病,一般表现为眼压骤然升高、眼底视神经萎缩和视力大幅度下降。由于青光眼在早期阶段没有明显症状,随着病情发展视力逐渐丧失,因此常被称为“视力的隐形杀手”。因此青光眼的早期筛查至关重要。目前青光眼的筛查方法分为三种:眼内压测量、基于功能的视野测试和视神经乳头评估。其中视神经盘评估更适合大规模的眼底筛查,而杯盘比常作为视神经乳头评估的重要依据。
3.目前临床上主要通过医生人工测量和计算杯盘比,这种方法不仅费时费力,而且容易受到医师临床经验等主观因素的影响,难以保证诊断的准确性。另外眼底图像存在对比度低、血管干扰、视神经头周围萎缩及玻璃疣等异常现象,这无疑为医生手动分割视盘和视杯增加不少难度。
4.根据分割任务中采用的特征不同,现有方法可分为传统分割方法和深度学习方法两大类。根据图像处理方法的不同,传统分割方法可细分为水平集方法、基于阈值方法、主动边缘建模方法、主动形状建模方法和基于聚类方法。然而传统分割方法容易受到眼底图像的光照、对比度和边缘清晰度的限制,并且模型性能的好坏在很大程度上取决于初始点选择和优化,因此鲁棒性有待提高。另外由于域迁移问题的存在,大多数深度学习方法在训练集上分割效果较好,却难以在与训练图像外观分布有所差异的新数据集上取得良好的分割性能。扫描仪、图像分辨率、光源强度和参数设置不同均会导致眼底图像外观产生明显差异。
5.因此克服域迁移对于提高网络模型的鲁棒性尤为关键,而设计一种能够克服域迁移并实现自动准确分割视盘和视杯的方法迫在眉睫。
技术实现要素:
6.为了解决上述问题,本发明提出了一种基于faster r-cnn的多机制自适应眼底图像分割方法,实现眼底图像中视盘和视杯的准确分割。
7.本发明的技术方案如下:一种多机制自适应的眼底图像分割方法,构建了多机制自适应faster r-cnn眼底图像分割网络,同时采用网络全局损失函数指导视盘和视杯分割;具体包括如下步骤:步骤1、收集眼底图像数据集,并进行预处理;步骤2、将预处理后的数据集输入到构建的多机制自适应faster r-cnn眼底图像分割网络进行网络训练;步骤3、采用网络全局损失函数指导视盘和视杯的精准分割;步骤4、实时采集眼底图像,输入到构建且训练完成的多机制自适应faster r-cnn
眼底图像分割网络中,利用网络中的全局损失函数准确分割视盘和视杯,协助医生临床诊断。
8.进一步地,图像数据集包括源域图像和目标域图像;采用改变对比度、旋转、缩放和平移操作对采集的彩色眼底图像数据进行数据增强,实现数据集扩增,预处理的具体过程为:步骤1.1、改变原图像的对比度,首先将原始图像转换为灰度图像,采用幂律变换改变图像的对比度;对输入图片的像素值进行非线性变化,设置不同的参数以得到不同的灰度;步骤1.2、对原图像进行缩放,缩放比例从0.65到1.25,以0.05为步长;步骤1.3、对原图像进行旋转,从0
°
到360
°
,以30
°
为步长;步骤1.4、对原图像进行平移,将原始眼底图像在水平和竖直方向上从-60像素到120像素进行平移,以20像素为步长。
9.进一步地,多机制自适应fasterr-cnn眼底图像分割网络由fasterr-cnn目标检测网络、基于空间注意力的区域对齐模块、金字塔感兴趣区域对齐模块和基于原型的语义对齐模块四种机制组成;多机制自适应fasterr-cnn眼底图像分割网络的构建过程如下:步骤2.1、构建fasterr-cnn目标检测网络;首先将眼底图像分辨率统一调整为512
×
512;然后将处理后的图像输入到fasterr-cnn目标检测网络检测视盘和视杯;fasterr-cnn目标检测网络主要包括特征提取模块、区域候选网络和目标分类与位置回归模块三部分;其中目标分类与位置回归模块由roi池化层、边界框回归器和分类器三部分组成;采用vgg16网络作为特征提取器,利用一系列的卷积、激活和池化操作提取输入眼底图像的特征图,并传递至后续的区域候选网络和全连接层;接着利用区域候选网络生成目标候选框;fasterr-cnn目标检测网络对一批锚框进行裁剪和过滤并利用softmax函数判断锚框属于目标或背景,边界框回归分支通过修正锚框得到较精确的候选框;然后roi池化层根据区域候选网络生成的目标候选框和vgg16最后一层输出的特征图计算得到固定大小的候选区域特征图,并送入后续全连接层进行目标分类和定位;最后分类器采用softmax函数对候选区域进行分类,同时利用平均绝对误差进行边界框回归以得到最终目标检测框的精确位置;步骤2.2、构建基于空间注意力的区域对齐模块;步骤2.2.1、基于空间注意力的区域对齐模块由域分类器和空间注意力机制两部分组成;为对齐源域和目标域之间前景目标的特征分布,首先在vgg16骨干网络的最后三个块中引入三个域分类器构造二人极大极小博弈;利用特征提取网络vgg16提取源域和目标域图像特征,并将特征送到域分类器;通过在特征分类器和判别器间加入梯度反转层,最大化域分类器的分类误差,最终使鉴别器无法区分图像来源于源域或目标域;通常神经网络采用梯度反向传播将损失逐层向后传递,而每层网络根据返回的误差计算梯度并更新本层网络的参数;梯度反转层将传到本层的误差乘以一个负数,使其前后的网络训练目标相反以达到对抗学习目的;介于0到1之间,定义如下,
ꢀ
(1)其中为超参数;表示当前训练步数与总训练步数之比,随着训练进行由0变为1;时仅训练域分类器,域分类损失不会反馈到特征提取器;随着训练的进行逐渐增加,特征提取器开始训练并逐步生成混淆域分类器的特征;域分类器的目标函数表示为: (2)其中n表示眼底图像数量,n表示输入眼底图像的序号,表示特征生成器gk的第k个卷积块提取的特征,表示特征生成器gk的参数,dk表示域分类器,表示域分类器dk的参数;di表示域标签,l
ce
表示交叉熵损失;因此vgg16网络的第k个卷积块的对抗学习损失函数为: (3)其中和分别表示生成器gk和域分类器dk的参数,和分别表示源域眼底图像和目标域眼底图像的概率,s表示源域,x表示输入的眼底视网膜图像,dk表示域分类器,t表示目标域;步骤2.2.2、采用注意力机制实现感兴趣区域的特征分布对齐;给定一幅眼底视网膜图像x,令为区域生成网络卷积层输出的特征图,其中h、w和c分别表示特征图的高、宽和通道数,r表示实数集;通过计算每个特征通道的平均值并过滤掉小于设定阈值的背景以得到空间注意力图;空间注意力特征图表示为: (4) (5) (6)其中f(x)表示滤波前的空间注意力图,表示sigmoid函数,c表示特征图通道数,c表示特征图通道的序号,m表示特征图通道数的最大值,(v,q)表示空间注意力图中像素点的坐标;表示判断函数,表示第c个通道上的特征图;m(x)表示空间注意
力特征图,表示逐像素相乘;阈值th(x)设置为f(x)的平均值;步骤2.2.3、采用双线性插值进行上采样以生成与特征图大小相同的注意力图;步骤2.3、构建金字塔感兴趣区域对齐模块;金字塔感兴趣区域对齐模块包含五层roialign,其输出空间大小分别为1
×
1、3
×
3、7
×
7、9
×
9和14
×
14;这些输出特征均被上采样到14
×
14大小并串联在一起组成多尺度特征图以学习更丰富的上下文信息表示;roialign首先遍历每个目标候选区域,保持坐标为浮点数的像素边界不进行量化操作;然后将候选区域分割成k
×
k个矩阵单元,每个矩阵单元的边界也不进行量化操作;最后采用双线性内插值法计算每个矩阵单元中四个固定坐标位置的值,并进行最大池化操作;步骤2.4、构建基于原型的语义对齐模块;步骤2.4.1、通过最小化不同域间同类目标组成的一组原型的距离实现特征空间上语义的一致性;源域和目标域的原型表示为: (7) (8)其中和分别表示源域和目标域中同类目标的原型,l=1代表视盘,l=2代表视杯;f(r)表示目标分类与位置回归模块的第二个全连接层输出的前景目标特征图,r表示前景目标区域;gt1和gt2分别表示源域图像中视盘和视杯的真实标签;roi
l
表示目标分类与位置回归模块生成的目标域伪标签;步骤2.4.2、对每个批次的局部原型进行如下的自适应动态更新操作: (9) (10)其中,表示局部目标原型和全局目标原型之间的余弦距离,表示求余弦距离,此处a和b只是局部目标原型和全局目标原型的符号化表示;表示第j次迭代时第l类目标的局部原型;而初始的源域和目标域全局原型和通过有标签的源域预训练模型计算得到;步骤2.4.3、最后通过最小化源域全局原型和目标域全局原型之间的欧氏距离实现语义对齐。
10.进一步地,特征提取模块中vgg16的网络结构包括依次连接的卷积块1、卷积块2、卷积块3、卷积块4、卷积块5;卷积块1中特征图的的高、宽和通道数分别为3、3、64,卷积块2中特征图的的高、宽和通道数分别为3、3、128,卷积块3中特征图的的高、宽和通道数分别为3、3、256,卷积块4中特征图的的高、宽和通道数分别为3、3、512,卷积块5中特征图的高、宽和通道数分别为3、3、512;卷积块之间为步长为2的最大池化。
11.进一步地,多机制自适应faster r-cnn网络的全局损失l
overalll
包括目标检测网络损失l
detection
、特征自适应模块损失l
sra
和语义自适应模块损失l
psa
三部分,表示为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)其中和表示平衡因子,分别用来平衡基于空间注意力的区域对齐模块和基于原型的语义对齐模块的权重。
12.进一步地,计算多机制自适应faster r-cnn网络的全局损失包括如下步骤:步骤3.1、目标检测网络在有标签的源域图像上计算得到前景目标检测网络损失l
detection
,l
detection
表示为: (12) (13) (14) (15)其中,l
rpn
、l
reg
和l
cls
分别表示区域候选网络、边界框回归器和分类器的损失;n
cls
和n
reg
分别表示最小批量的大小和锚点位置的数量;u表示最小批量中锚点的索引序号,pu和p
u*
分别表示锚点u为目标的预测概率和真实标签,表示平衡系数;tu和t
u*
分别表示预测边框和真实边框的四个参数化坐标;z表示第u个预测边框坐标与真实边框坐标之间的差值;y表示像素标签,p表示模型预测像素为目标的概率;步骤3.2、特征自适应模块利用空间注意力机制提取眼底图像中的感兴趣区域来优化l
sra
实现感兴趣区域的特征对齐;l
sra
表示为: (16)其中uk表示上采样操作,m(x)表示空间注意力特征图,表示第k个卷积块中像素点(v,q)的对抗性损失;步骤3.3、语义自适应模块首先采用faster r-cnn预测目标域图像的伪标签,然后
动态自适应地更新视盘和视杯的全局原型,最后通过优化l
psa
实现视盘和视杯类别的语义对齐;l
psa
表示为: (17)其中和分别表示源域全局原型和目标域全局原型。
13.本发明所带来的有益技术效果:本发明将视盘和视杯分割转化为目标检测问题,设计了轻量型的多机制自适应faster r-cnn网络进行视盘和视杯区检测,能够更好地优化训练过程,避免计算冗余并节省大量计算时间;本发明能够有效克服域迁移问题,不仅能够减少低对比度及噪声的不良干扰,而且可以有效保留视盘和视杯的边缘细节和形状特征,具有良好的鲁棒性与泛化性。
附图说明
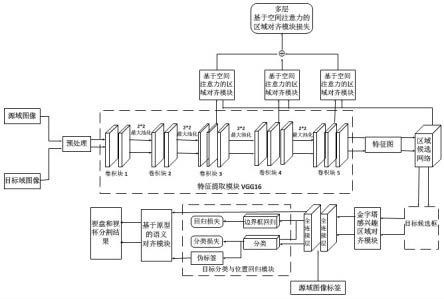
14.图1为本发明基于faster r-cnn的多机制自适应眼底图像分割方法的大致流程图;图2为图1中多机制自适应faster r-cnn眼底图像分割网络的整体结构图;图3为本发明faster r-cnn的算法流程图;图4为本发明基于空间注意力的区域对齐模块的结构示意图;图5为本发明空间注意力机制的流程图;图6为本发明金字塔感兴趣区域对齐模块的结构示意图;图7为本发明基于原型的语义对齐模块的结构示意图。
具体实施方式
15.下面结合附图以及具体实施方式对本发明作进一步详细说明:本发明提出了一种基于faster r-cnn的多机制自适应眼底图像分割方法,构建了多机制自适应faster r-cnn眼底图像分割网络,该网络由faster r-cnn目标检测网络、基于空间注意力的区域对齐模块、金字塔感兴趣区域对齐模块和基于原型的语义对齐模块四种机制组成,同时,采用网络全局损失函数指导视盘和视杯的精准分割。该方法的大致过程为:首先,基于空间注意力区域对齐模块定位感兴趣区域并通过对抗学习对齐不同域中感兴趣区域的特征分布,以类无关的方式实现粗粒度的域自适应;然后,基于金字塔感兴趣区域对齐模块提取多尺度的上下文信息以学习更丰富的特征表示,为避免因视盘和视杯外观相似而造成错误分类;最后,在网络的训练迭代过程中动态更新视盘和视杯原型,通过缩小源域和目标域中同类目标原型之间的距离实现语义一致性,实现细粒度的域自适应。
16.如图1所示,一种基于faster r-cnn的多机制自适应眼底图像分割方法包括如下步骤:步骤1、收集眼底图像数据集,并进行预处理;图像数据集包括源域图像和目标域图像;由于数据集中的图像数量有限,因此采用改变对比度、旋转、缩放和平移操作对采集的彩色眼底图像数据进行数据增强,实现数据集扩增,预处理的具体过程为:步骤1.1、改变原图像的对比度:首先将原始图像转换为灰度图像,采用幂律变换
改变图像的对比度。对输入图片的像素值进行非线性变化,设置不同的参数以得到不同的灰度。
17.步骤1.2、对原图像进行缩放,缩放比例从0.65到1.25,以0.05为步长。
18.步骤1.3、对原图像进行旋转,从0
°
到360
°
,以30
°
为步长。
19.步骤1. 4、对原图像进行平移。将原始眼底图像在水平和竖直方向上从-60像素到120像素进行平移,以20像素为步长。
20.步骤2、将预处理后的数据集输入到构建的多机制自适应faster r-cnn眼底图像分割网络进行网络训练。多机制自适应faster r-cnn眼底图像分割网络的整体架构如图2所示,由faster r-cnn目标检测网络、基于空间注意力的区域对齐模块、金字塔感兴趣区域对齐模块和基于原型的语义对齐模块四种机制组成。该网络的构建过程如下:步骤2.1、构建faster r-cnn目标检测网络由于不同数据集中的图像分辨率不同,为保证输入图像的一致性首先将眼底图像分辨率统一调整为512
×
512。然后将处理后的图像输入到faster r-cnn目标检测网络检测视盘和视杯。faster r-cnn目标检测网络主要包括特征提取模块、区域候选网络和目标分类与位置回归模块三部分。其中目标分类与位置回归模块由roi(region of interest,感兴趣区域)池化层、边界框回归器和分类器三部分组成。faster r-cnn的算法流程如图3所示。
21.首先采用vgg16网络作为特征提取器,利用一系列的卷积、激活和池化操作提取输入眼底图像的特征图,并传递至后续的区域候选网络和全连接层。接着利用区域候选网络生成目标候选框。
22.特征提取模块中vgg16的网络结构包括依次连接的卷积块1、卷积块2、卷积块3、卷积块4、卷积块5;卷积块1中特征图的的高、宽和通道数分别为3、3、64,卷积块2中特征图的的高、宽和通道数分别为3、3、128,卷积块3中特征图的的高、宽和通道数分别为3、3、256,卷积块4中特征图的的高、宽和通道数分别为3、3、512,卷积块5中特征图的高、宽和通道数分别为3、3、512;卷积块之间为步长为2的最大池化。
23.faster r-cnn目标检测网络对一批锚框进行裁剪和过滤并利用softmax函数判断锚框属于目标或背景,边界框回归分支通过修正锚框得到较精确的候选框。然后roi池化层根据区域候选网络生成的目标候选框和vgg16最后一层输出的特征图计算得到固定大小的候选区域特征图,并送入后续全连接层进行目标分类和定位。最后分类器采用softmax函数对候选区域进行分类,同时利用平均绝对误差进行边界框回归以得到最终目标检测框的精确位置。
24.步骤2.2、构建基于空间注意力的区域对齐模块步骤2.2.1、基于空间注意力的区域对齐模块由域分类器和空间注意力机制两部分组成,模块结构如图4所示。为对齐源域和目标域之间前景目标的特征分布,首先在vgg16骨干网络的最后三个块中引入三个域分类器构造二人极大极小博弈。利用特征提取网络vgg16提取源域和目标域图像特征,并将特征送到域分类器。通过在特征分类器和判别器间加入梯度反转层,最大化域分类器的分类误差,最终使鉴别器无法区分图像来源于源域或目标域。
25.通常神经网络采用梯度反向传播将损失逐层向后传递,而每层网络根据返回的误
差计算梯度并更新本层网络的参数。梯度反转层将传到本层的误差乘以一个负数,使其前后的网络训练目标相反以达到对抗学习目的。不是一个常数,它介于0到1之间,即 (1)其中为超参数。表示当前训练步数与总训练步数之比,随着训练进行由0变为1。时仅训练域分类器,域分类损失不会反馈到特征提取器。随着训练的进行逐渐增加,特征提取器开始训练并逐步生成混淆域分类器的特征。
26.域分类器的目标函数表示为: (2)其中n表示眼底图像数量,n表示输入眼底图像的序号,表示特征生成器gk的第k个卷积块提取的特征,表示特征生成器gk的参数。dk表示域分类器, 表示域分类器dk的参数。di表示域标签,l
ce
表示交叉熵损失。
27.因此vgg16网络的第k个卷积块的对抗学习损失函数为: (3)其中和分别表示生成器gk和域分类器dk的参数,和分别表示源域眼底图像和目标域眼底图像的概率,s表示源域,x表示输入的眼底视网膜图像,dk表示域分类器,t表示目标域。
28.步骤2.2.2、采用注意力机制实现感兴趣区域的特征分布对齐。空间注意力机制的流程如图5所示,给定一幅眼底视网膜图像x,令为区域生成网络卷积层输出的特征图,其中h、w和c分别表示特征图的高、宽和通道数,r表示实数集。通过计算每个特征通道的平均值并过滤掉小于设定阈值的背景以得到空间注意力图。空间注意力特征图表示为: (4) (5) (6)其中f(x)表示滤波前的空间注意力图,表示sigmoid函数,c表示特征图通道
数,c表示特征图通道的序号,m表示特征图通道数的最大值,(v,q)表示空间注意力图中像素点的坐标。表示判断函数,表示第c个通道上的特征图。m(x)表示空间注意力特征图,表示逐像素相乘。阈值th(x)设置为f(x)的平均值。
29.步骤2.2.3、由于空间注意图的大小与不同卷积块得到的特征图的大小不一致,故采用双线性插值进行上采样以生成与特征图大小相同的注意力图。
30.步骤2.3、构建金字塔感兴趣区域对齐模块金字塔roi对齐模块结构如图6所示,它包含五层roialign(感兴趣区域对齐层),其输出空间大小分别为1
×
1、3
×
3、7
×
7、9
×
9和14
×
14。这些输出特征均被上采样到14
×
14大小并串联在一起组成多尺度特征图以学习更丰富的上下文信息表示。roialign首先遍历每个目标候选区域,保持坐标为浮点数的像素边界不进行量化操作。然后将候选区域分割成k
×
k个矩阵单元,每个矩阵单元的边界也不进行量化操作。最后采用双线性内插值法计算每个矩阵单元中四个固定坐标位置的值,并进行最大池化操作。
31.步骤2.4、构建基于原型的语义对齐模块步骤2.4.1、基于原型的语义对齐模块的结构如图7所示,它通过最小化不同域间同类目标组成的一组原型的距离实现特征空间上语义的一致性。源域和目标域的原型可表示为: (7) (8)其中和分别表示源域和目标域中同类目标的原型,l=1代表视盘,l=2代表视杯。f(r)表示目标分类与位置回归模块的第二个全连接层输出的前景目标特征图,r表示前景目标区域。gt1和gt2分别表示源域图像中视盘和视杯的真实标签。roi
l
表示目标分类与位置回归模块生成的目标域伪标签。
32.步骤2.4.2、为保证每次训练迭代过程中均能实现不同域之间视盘和视杯的逐像素的语义对齐,对每个批次的局部原型进行如下的自适应动态更新操作: (9) (10)其中,表示局部目标原型和全局目标原型之间的余弦距离,表示求余弦距离,此处a和b只是局部目标原型和全局目标原
型的符号化表示。表示第j次迭代时第l类目标的局部原型。而初始的源域和目标域全局原型和通过有标签的源域预训练模型计算得到。
33.步骤2.4.3、最后通过最小化源域全局原型和目标域全局原型之间的欧氏距离实现语义对齐。
34.步骤3、采用网络全局损失函数指导视盘和视杯的精准分割。多机制自适应faster r-cnn网络的全局损失l
overalll
包括目标检测网络损失l
detection
、特征自适应模块损失l
sra
和语义自适应模块损失l
psa
三部分,可表示为:
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)其中和表示平衡因子,分别用来平衡基于空间注意力的区域对齐模块和基于原型的语义对齐模块的权重。实验中将和分别设置为0.8和0.2。计算该网络的全局损失包括如下步骤:步骤3.1、目标检测网络在有标签的源域图像上计算得到前景目标检测网络损失l
detection
。l
detection
可表示为: (12) (13) (14) (15)其中,l
rpn
、l
reg
和l
cls
分别表示区域候选网络、边界框回归器和分类器的损失。n
cls
和n
reg
分别表示最小批量的大小和锚点位置的数量。u表示最小批量中锚点的索引序号,pu和p
u*
分别表示锚点u为目标的预测概率和真实标签,表示平衡系数。tu和t
u*
分别表示预测边框和真实边框的四个参数化坐标。z表示第u个预测边框坐标与真实边框坐标之间的差值。y表示像素标签,p表示模型预测像素为目标的概率。
35.步骤3.2、特征自适应模块利用空间注意力机制提取眼底图像中的感兴趣区域来优化l
sra
实现感兴趣区域的特征对齐。l
sra
可表示为: (16)其中uk表示上采样操作,m(x)表示空间注意力特征图,表示第k个卷积块中
像素点(v,q)的对抗性损失。
36.步骤3.3、语义自适应模块首先采用faster r-cnn预测目标域图像的伪标签,然后动态自适应地更新视盘和视杯的全局原型,最后通过优化l
psa
实现视盘和视杯类别的语义对齐。l
psa
可表示为: (17)其中和分别表示源域全局原型和目标域全局原型。
37.步骤4、实时采集眼底图像,输入到构建且训练完成的多机制自适应faster r-cnn眼底图像分割网络中,利用网络中的全局损失函数准确分割视盘和视杯,协助医生临床诊断。
38.以下是本发明方法的实验数据部分。
39.本发明实验部分的数据集采用refuge、drions_db、drishti-gs和rim-one-r3。
40.为定量分析和对比不同方法的分割性能,本发明采用dice值(dice)、重叠误差(overlap error,e)、杯盘比误差(cdr error,)和准确率(accuracy,acc)作为分割结果的评价指标,具体定义如下: (18) (19) (20) (21) (22) (23)其中和g分别表示算法分割结果和真实标签;area(
·
)表示区域像素。cdrs和cdrg分别表示根据算法分割和手动分割结果计算得到的杯盘比。vcd和vdd分别表示纵向视杯直径和纵向视盘直径。tp为真阳性表示真正的视盘或视杯像素被正确分类的数目。fp为假阳性表示背景像素被错误分类为视盘或视杯像素的数目。tn为真阴性表示背景像素被正确分类的像素数目,fn为假阴性表示视盘或视杯像素被错误识别为背景像素的数目。
41.为了验证本发明方法的优势,将本发明方法与现有5种方案进行了对比实验,表1展示了采用不同方法在rim-one-r3数据集上的定量分割对比结果。其中,方案1为采用现有
技术视网膜深度图像理解方法的处理结果,方案2为采用现有技术多标签深度网络的处理结果,方案3为采用现有技术fc-densenet的处理结果,方案4为采用现有技术jointrcnn的处理结果,方案5为采用现有技术基于区块的输出空间对抗学习方法的处理结果。
42.表1 不同方法在rim-one-r3数据集上的定量对比结果其中dice
disc
和dice
cup
分别表示视盘和视杯分割结果的dice值。acc
disc
和acc
cup
分别表示视盘和视杯分割结果的准确率。e
disc
和e
cup
分别表示视盘和视杯分割结果的重叠误差。dice和acc值越大说明分割结果越准确,e和值越小表明分割结果越准确。
43.从以上实验结果可知,本发明方法能清晰准确地分割出视盘和视杯,分割结果接近于专家的手工标注结果,并且有效保留边缘细节和形状特性。
44.当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1