基于多特征联合时序匹配的极化SAR农作物分类方法、系统、设备及介质
基于多特征联合时序匹配的极化sar农作物分类方法、系统、设备及介质
技术领域
1.本发明涉及农作物分类,具体涉及一种顾及物候偏移的基于多特征联合时序匹配的极化sar农作物分类方法、系统、设备及介质。
背景技术:
2.相较于光学遥感易受云雨、雾霾等恶劣天气的影响,难以获取实时的农作物分布信息且无法对农作物的生长周期进行完整监测,合成孔径雷达(sar)遥感技术可全天时、全天候工作,持续监测农作物的生长变化,已成为农作物监测的重要手段。极化sar(polsar)能够借助多极化通道,反映农作物形态结构、介电常数特性和取向分布等生物物理参数信息。同时,相对于单景影像只能反映农作物某一时刻的形状结构信息,难以对具有相似特性的农作物进行精确分类,多时相极化sar数据可借助于农作物特有的生长趋势、物候信息,增大作物间的区分度,减少错分、误分的概率。但在实际的农作物种植中,由于生长条件和田间管理的差异,即使是同种农作物,不同地块的具体播种期,物候进化速率也会发生变化,导致大范围、复杂试验区的分类精度有限。目前,基于多时相极化sar数据进行农作物分类监测,已取得大量可观成果。
3.基于多时相极化sar数据的农作物分类方法可以分为两大类:
4.(1)基于特征堆叠的分类方法,将单时相的特征向量串联为一个较长的特征向量,通过聚类、机器学习,深度学习等方法进行分类。该方法将时序特征视为不同波段,可以在一定程度上选取最优波段组合,但却忽略了波段间的时间关联性,且没有运用到极化sar时变特征信息。
5.(2)基于时间序列曲线相似度的方法可将时序特征视为时变特征曲线,通过计算待识别地物与已知标准地物的曲线相似度进行分类。相似度越高,则属于同类地物的可能性越大。目前,基于时序曲线匹配的分类方法在处理农作物的物候偏移问题上已展现出巨大的优势。其中,twshapedtw算法可基于曲线的局部形状及时间约束,通过一个序列到另一个序列的非线性映射,得到曲线间的距离相似度。已被证实可有效减少曲线之间的匹配误差,提高小样本情况下的农作物制图精度。
6.然而上述方法多基于单个时序特征分别寻找最优匹配路径,而未考虑实际农作物物候变化一致性约束,匹配结果不稳健,易受异常值影响。同时传统方法仅使用累加距离和作为相似度度量,未能充分利用匹配信息及农作物的物候信息,类别间的区分度有待提升。
技术实现要素:
7.针对农作物的物候偏移问题,本发明提供了一种多特征联合时序匹配的极化sar农作物分类方法,充分利用农作物的时变特性及物候信息,提高农作物的类别区分度,得到更准确的分类结果。
8.为实现上述技术目的,本发明采用如下技术方案:
9.一种基于多特征联合时序匹配的极化sar农作物分类方法,包括:
10.步骤1,获取农作物区域的多时相极化sar数据集,提取多种特征得到各特征时间序列,计算各极化特征区分度;
11.步骤2,以各特征区分度为权重对欧式距离进行加权,作为特征时间序列曲线对齐的算法的基距离,将待分类的农作物特征时间序列曲线与各种标准农作物样本的特征时间序列曲线进行路径匹配;
12.步骤3,将待分类的农作物已匹配的特征时间序列曲线,按照各种标准农作物的物候日历划分子序列,并计算待分类的农作物与每种标准农作物之间的各物候子序列相似度;再根据各种特征的物候子序列相似度,计算待分类的农作物与每种标准农作物之间基于各特征的距离相似度;
13.步骤4,以各特征区分度为权重,对各种特征与每种标准农作物之间的距离相似度进行加权计算,得到待分类的农作物与每种标准农作物之间最终的匹配距离相似度;将最终匹配距离相似度最小的标准农作物的类别,确定为待分类的农作物的类别。
14.进一步地,步骤1中提取的极化特征包括后向散射系数、nned分解的功率值、总功率span和雷达植被指数。
15.进一步地,步骤1中极化特征区分度的计算方法:首先将极化sar进行超像素分割,得到农作物类别级对象的特征时间序列集;然后根据特征时间序列集,按以下公式计算各极化特征区分度:
[0016][0017]
式中,为极化特征f的区分度;为极化sar数据集中属于农作物类别c的第k个样本的特征时间序列,记任一样本的特征时间序列为x={x1,x2,...,x
t
},其中xi表示i时相的极化特征值;为类别c的所有样本的均值特征时间序列;nc为类别c包括的样本数,l为农作物类别数;d
ts
为时序曲线对齐距离,d
ed
为欧式距离。
[0018]
进一步地,步骤2具体包括:
[0019]
首先,基于步骤1得到的特征区分度建构多特征联合加权欧式距离,以作为不同曲线各时相之间的距离:
[0020][0021][0022]
式中,为极化特征f的区分度,wf为极化特征f的权重,f为提取的极化特征种类数;表示标准农作物样本a的极化特征f的时间序列曲线af在时相i的值,表示待分类的农作物样本b的极化特征f的时间序列曲线bf在时相j的值;d
ij
为曲线af在i时相与曲线bf在时相j的多特征加权欧式距离;
[0023]
然后,增加动态时间权重约束w
ij
,计算曲线af在i时相与曲线bf在时相j的距离d
′
ij
:
[0024]d′
ij
=(w
ij
+d
ij
)
[0025][0026]
式中,g为增益因子;c=|i-j|为时间距离因子,mc为标准农作物样本a的时间序列曲线的中间节点对应时间;||
·
||2为求2范数;
[0027]
最后,以距离d
′
ij
对作为特征时间序列曲线对齐算法的基距离,将待分类的农作物特征时间序列曲线与各种标准农作物样本的特征时间序列曲线进行路径匹配。
[0028]
进一步地,步骤3中物候子序列相似度的计算方法为:
[0029]
(a1)设某种标准农作物a的物候日历为:出苗期,1~r时刻;生长期,r+1~p;发育期,p+1~q;成熟期,q+1~g;
[0030]
则将标准农作物a的任意极化特征f的特征时间序列af按物候划分子序列为:
[0031][0032]
将待分类的农作物b特征时间序列bf,根据步骤2匹配得到的路径,按物候划分子序列为:
[0033][0034]
式中,分别表示标准农作物a和待分类的农作物b的极化特征f在物候期j的子序列,j=1,2,3,4分别对应于出苗期、生长期、发育期、成熟期;
[0035]
(a2)计算标准农作物a与待分类的农作物b的物候子序列相似度:
[0036][0037][0038]
式中,表示标准农作物a和待分类的农作物b的极化特征f在物候期j的物候子序列相似度,d
ed
()表示计算欧式距离。
[0039]
进一步地,步骤3中所述待分类的农作物与每种标准农作物之间的距离相似度,计算方法为:
[0040]
(b1)计算各物候子序列的特征均值,构成特征均值时间序列和
[0041][0042][0043]
式中,和分别为物候子序列和的特征均值,即各子序列所有时相的特征平均值;
[0044]
(b2)将物候子序列相似度作为对应子序列惩罚项,根据物候子序列的特征均值,计算标准农作物a和待分类的农作物b基于各物候极化特征f的距离相似度
[0045]
[0046]
式中,为极化特征f的子序列惩罚项,
[0047]
进一步地,步骤4中对各种特征与每种标准农作物之间的距离相似度进行加权计算得到最终匹配距离相似度d
ab
的计算方法为:
[0048][0049]
式中,f表示提取的第f种极化特征,f为提取的极化特征种类数;wf为极化特征f的区分度,为标准农作物a和待分类的农作物b基于极化特征f的距离相似度。
[0050]
一种基于上述任一项所述农作物分类方法的系统,包括:
[0051]
特征提取与区分度计算模块,用于:获取农作物区域的多时相极化sar数据集,提取多种特征得到各特征时间序列,计算各极化特征区分度;
[0052]
路径匹配模块,用于:以各特征区分度为权重对欧式距离进行加权,作为特征时间序列曲线对齐的算法的基距离,将待分类的农作物特征时间序列曲线与各种标准农作物样本的特征时间序列曲线进行路径匹配;
[0053]
特征距离相似度计算模块,用于:将待分类的农作物已匹配的特征时间序列曲线,按照各种标准农作物的物候日历进行划分子序列,并计算待分类的农作物与每种标准农作物之间的各物候子序列相似度;再根据各种特征的物候子序列相似度,计算待分类的农作物与每种标准农作物之间基于各特征的距离相似度;
[0054]
匹配距离相似度计算及类别确定模块,用于:以各特征区分度为权重,对各种特征与每种标准农作物之间的距离相似度进行加权计算,得到待分类的农作物与每种标准农作物之间最终的匹配距离相似度;将最终匹配距离相似度最小的标准农作物的类别,确定为待分类的农作物的类别。
[0055]
一种电子设备,包括存储器及处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器实现上述任一项所述的农作物分类方法。
[0056]
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的农作物分类方法。
[0057]
有益效果
[0058]
本发明针对农作物物候偏移问题,构建了多特征联合时序匹配的极化sar农作物分类方法,可有效解决由气象、种植活动等造成的物候周期变化及时间扭曲问题,更加适用于小样本、大范围或复杂研究区的农作物分类制图。
[0059]
本发明一方面,考虑物候变化一致性约束,通过多特征联合加权时序匹配减少异常值影响,得到更稳健的匹配结果;另一方面,基于农作物物候日历构建特征子序列,进行子序列匹配分类,以此更加充分地利用农作物的时变特性及物候信息,提高农作物的类别区分度。为提高基于时序特征曲线匹配的农作物分类制图精度提供了可靠的方法。
附图说明
[0060]
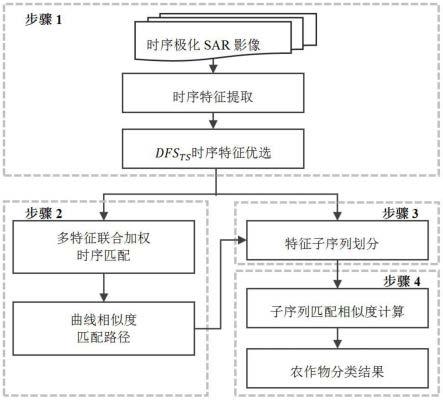
图1是本发明实施例所述方法的流程图。
具体实施方式
[0061]
下面对本发明的实施例作详细说明,本实施例以本发明的技术方案为依据开展,给出了详细的实施方式和具体的操作过程,对本发明的技术方案作进一步解释说明。
[0062]
为了更加清楚地说明本发明的目的、实施流程,本实施例选取agrisar 2009项目的flevoland试验区农田数据集,对本发明所提方法进行进一步的详细说明。应当理解,此处所描述的具体实施仅用于解释本发明,并不用于限定本发明。
[0063]
实施例1
[0064]
本实施例提供一种基于多特征联合时序匹配的极化sar农作物分类方法,具体实施步骤参照图1所示,包括以下步骤:
[0065]
步骤1,多时相极化sar数据处理:首先对多时相极化sar数据进行配准、滤波,然后进行极化特征提取以及极化sar超像素分割,得到对象级时序极化特征数据集;之后,采用特征分离度指标dfs
ts
计算特征区分度,评估不同时序极化特征对农作物类别的区分能力。具体为:
[0066]
(1)配准、滤波:选取时序极化sar影像中的一景为参考影像,将其余影像配准到参考影像的坐标系下,然后对时序影像进行斑点噪声滤波。
[0067]
(2)时序特征提取:对极化sar影像进行极化分解,提取像素级极化特征。并将多时相特征按时间进行串联,得到极化特征的时间序列。然后对时序特征进行归一化。本实施例所使用的极化特征包括:后向散射系数:sigmahv,sigmahh,sigmavv;nned分解的功率值:ps、pd、pv,以及总功率span;雷达植被指数:rvi;cloude分解的特征参数:h、a、alpha。
[0068]
(3)极化sar超像素分割:对多时相影像进行slic分割,得到超像素分割结果。
[0069]
(4)生成对象级时序极化特征数据集:对每一个超像素块所包含像素的极化特征进行平均,得到农作物类别级对象级的时序极化特征数据集。
[0070]
(5)时序特征优选:基于时序匹配算法构建dfs
ts
特征分离度指标计算不同时序极化特征的区分度,用于评估各特征对农作物类别的区分能力。
[0071][0072]
式中,为极化特征f的区分度;为极化sar数据集中属于农作物类别c的第k个样本的特征时间序列,记任一样本的特征时间序列为x={x1,x2,...,x
t
},其中xi表示i时相的极化特征值;为类别c的所有样本的均值特征时间序列;nc为类别c包括的样本数,l为农作物类别数;d
ts
为时序曲线对齐距离,d
ed
为欧式距离。
[0073]
步骤2,多特征联合加权时序匹配:首先将步骤得到的特征区分度作为权重,对极化特征时间序列进行加权,然后用多特征联合加权欧式距离代替传统的单一特征欧式距离,作为时序曲线对齐算法的基距离,进行时序特征曲线匹配。具体为:
[0074]
假设某种标准农作物样本a的任意极化特征f的时间序列曲线为待分类的农作物样本b的极化特征f的时间序列曲线为
[0075]
首先,基于步骤1得到的特征区分度建构多特征联合加权欧式距离,获取各时间节点间的距离矩阵dm×n,其矩阵元素可表示为:
[0076][0077][0078]
式中,为极化特征f的区分度,wf为极化特征f的权重,f为提取的极化特征种类数;表示极化特征f的时间序列曲线af在时相i的值,表示极化特征f的时间序列曲线bf在时相j的值;d
ij
为曲线a在i时相与曲线b在时相j的多特征加权欧式距离。
[0079]
然后,增加动态时间权重约束w
ij
,计算曲线a在i时相与曲线b在时相j的距离d
′
ij
:
[0080]d′
ij
=(w
ij
+d
ij
)
[0081][0082]
式中,g为增益因子;c=|i-j|为时间距离因子,mc为标准农作物样本a的时间序列曲线的中间节点对应时间;||
·
||2为求2范数;其中,参数g和mc可基于训练样本通过5折交叉验证求取最优解确定。
[0083]
最后,以距离d
′
ij
对作为特征时间序列曲线对齐算法的基距离,将待分类的农作物特征时间序列曲线与各种标准农作物样本的特征时间序列曲线进行路径匹配。
[0084]
本实施例中的路径匹配采用现有技术实现:基于边界性、连续性、单调性约束,通过递归累加最小距离来计算累加距离矩阵qm×n,其矩阵元素可表示为:
[0085]qij
=min{q
i-1,j
,q
i-1,j-1
,q
i,j-1
)+d
′
ij q
11
=d
′
11
[0086]
式中,i、j即为距离矩阵qm×n中的某一个位置的行列号;
[0087]
基于路径和最小约束,使用动态搜索算法,即可得到最优匹配路径p,可表述为:
[0088][0089]
本发明中的待分类的农作物b,由于存在物候不确定问题,i时相下,标准农作物a可能生长到开花,农作物b可能已经结果子,那么这个时相下,两者的特征是不对应的,反应的信息不同。因此构建算法实现路径匹配,就能找到a的各个时期对应的b的时期。例如b与a的i时相(开花)对应的时期,即可能是i-1时期。然后后续计算曲线距离相似度分类时,用到的是a的i时期特征与b的i-1时期特征的距离。
[0090]
步骤3,特征子序列划分:基于每种标准农作物的物候日历,对待分类的农作物的极化特征时间序列进行子序列划分;并计算待分类的农作物与每种标准农作物之间的各物候子序列相似度;再根据各种特征的物候子序列相似度,计算待分类的农作物与每种标准农作物之间基于各特征的距离相似度。具体为:
[0091]
首先,假设某种标准农作物a的物候日历为:出苗期,1~r时刻;生长期,r+1~p;发育期,p+1~q;成熟期,q+1~g;则将标准农作物a的任意极化特征f的特征时间序列af按物候划分子序列为:
[0092][0093]
将待分类的农作物b特征时间序列bf,根据步骤2匹配得到的路径,按物候划分子序列为:
[0094][0095]
式中,分别表示标准农作物a和待分类的农作物b的极化特征f在物候期j的子序列,j=1,2,3,4分别对应于出苗期、生长期、发育期、成熟期。
[0096]
然后,计算标准农作物a与待分类的农作物b的物候子序列相似度:
[0097][0098][0099]
式中,表示标准农作物a和待分类的农作物b的极化特征f在物候期j的物候子序列相似度,d
ed
()表示计算欧式距离。
[0100]
最后,计算待分类的农作物与每种标准农作物之间的距离相似度,计算方法为:
[0101]
(1)计算各物候子序列的特征均值,构成特征均值时间序列和
[0102][0103][0104]
式中,和分别为物候子序列和的特征均值,即各子序列所有时相的特征平均值;
[0105]
(2)将物候子序列相似度作为对应子序列惩罚项,根据物候子序列的特征均值,计算标准农作物a和待分类的农作物b基于各物候极化特征f的距离相似度
[0106][0107]
式中,为极化特征f的子序列惩罚项,
[0108]
步骤4,以各特征区分度为权重,对各种特征与每种标准农作物之间的距离相似度进行加权计算,得到待分类的农作物与每种标准农作物之间最终的匹配距离相似度;将最终匹配距离相似度最小的标准农作物的类别,确定为待分类的农作物的类别。
[0109]
其中,对各种特征与每种标准农作物之间的距离相似度进行加权计算得到最终匹配距离相似度d
ab
的计算方法为:
[0110][0111]
式中,f表示提取的第f种极化特征,f为提取的极化特征种类数;wf为极化特征f的区分度,为标准农作物a和待分类的农作物b基于极化特征f的距离相似度。
[0112]
实施例2
[0113]
本实施例提供一种基于多特征联合时序匹配的极化sar农作物分类系统,包括以下模块:
[0114]
特征提取与区分度计算模块,用于:获取农作物区域的多时相极化sar数据集,提取多种特征得到各特征时间序列,计算各极化特征区分度;
[0115]
路径匹配模块,用于:以各特征区分度为权重对欧式距离进行加权,作为特征时间序列曲线对齐的算法的基距离,将待分类的农作物特征时间序列曲线与各种标准农作物样本的特征时间序列曲线进行路径匹配;
[0116]
特征距离相似度计算模块,用于:将待分类的农作物已匹配的特征时间序列曲线,按照各种标准农作物的物候日历进行划分子序列,并计算待分类的农作物与每种标准农作物之间的各物候子序列相似度;再根据各种特征的物候子序列相似度,计算待分类的农作物与每种标准农作物之间基于各特征的距离相似度;
[0117]
匹配距离相似度计算及类别确定模块,用于:以各特征区分度为权重,对各种特征与每种标准农作物之间的距离相似度进行加权计算,得到待分类的农作物与每种标准农作物之间最终的匹配距离相似度;将最终匹配距离相似度最小的标准农作物的类别,确定为待分类的农作物的类别。
[0118]
本实施例提供的农作物分类系统所包括的各模块,属于实施例1所述方法的功能实现模块,具体工作原理和实现方式与实施例1所述相同,此处不再重复阐述。
[0119]
实施例3
[0120]
本实施例提供一种电子设备,包括存储器及处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器实现实施例1所述的基于多特征联合时序匹配的极化sar农作物分类方法。
[0121]
实施例4
[0122]
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现实施例1所述的基于多特征联合时序匹配的极化sar农作物分类方法。
[0123]
以上实施例为本技术的优选实施例,但是,本发明实施例并不限于上述实施方式中的具体细节,在本发明实施例的技术构思范围内,可以对本发明实施例的技术方案进行多种简单变型,这些简单变型均属于本发明实施例的保护范围。此外,本发明实施例的各种不同的实施方式之间也可进行各种变换或改进,在不脱离本技术总的构思的前提下,其同样应当视为本发明实施例所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1