一种可控的动态LED球幕动感影院系统及方法与流程
一种可控的动态led球幕动感影院系统及方法
技术领域
1.本发明涉及影院系统领域,尤其涉及一种可控的动态led球幕动感影院系统及方法。
背景技术:
2.动感影院就是从传统的立体影院基础上发展而来的,相比较于其它类型影院,具有主题突出、科技含量高、效果逼真、画面冲击性强等特点和优势。随着影院娱乐技术的发展和娱乐市场的需求,人们不仅将震动、坠落、吹风、喷水、挠痒等特技引入3d影院,还根据影片的情景精心设计出烟雾、雨、光电、气泡等效果,形成了一种独特的体验,这就是当今十分流行的4d影院。由于观众在观看4d影片时能够获得视觉、听觉、触觉、嗅觉等全方位感受,近年来4d影院的发展非常迅猛,人们都很喜欢4d影院。
3.而现有的led球幕动感影院在使用时,一些led球幕动感影院在放映画面时,由于不同的角度可能造成差异,一些选择扭动头部而适配观影角度,若造成不便于的角度不利于及时发现,影响后续角度。
4.为解决上述问题,本技术中提出一种可控的动态led球幕动感影院系统及方法。
技术实现要素:
5.(一)发明目的
6.为解决背景技术中存在的技术问题,本发明提出一种可控的动态led球幕动感影院系统及方法,本发明通过iot摄像机对头部姿态进行监控,并经过一系列算法的计算,以最终输出监测的值,为后续调整相应处放映调整。
7.(二)技术方案
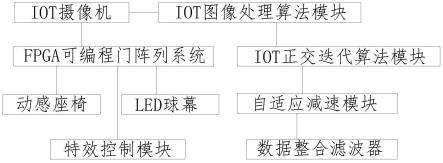
8.为解决上述问题,本发明提供了一种可控的动态led球幕动感影院系统,包括fpga可编程门阵列系统、动感座椅、led球幕、特效控制模块和iot摄像机;
9.动感座椅与fpga可编程门阵列系统通讯连接,动感座椅用于受pga可编程门阵列系统控制进行动作;
10.led球幕与fpga可编程门阵列系统通讯连接,led球幕用于对画面进行放映;
11.特效控制模块与fpga可编程门阵列系统通讯连接,特效控制模块用于模拟雪花、吹风、烟雾、闪电和入侵效果;
12.fpga可编程门阵列系统通过iot摄像机与iot图像处理算法模块与iot正交迭代算法模块连接,ot正交迭代算法模块通过自适应减速模块与数据整合滤波器连接,用于对头部姿态数据的采集及输出。
13.优选的,iot正交迭代算法模块的算法可选用线性算法和非线性迭代算法。
14.优选的,特效控制模块包括烟雾机、雪花机、吹风机和频闪灯。
15.优选的,特效控制模块还包括入侵单元。
16.优选的,fpga可编程门阵列系统通讯连接有烟雾报警器。
17.优选的,fpga可编程门阵列系统通讯连接有危险气体传感器。
18.优选的,设不共线的目标特征点的空间坐标集为:{p
oi
(x,y,z)|i=1,2,3
…
n,n≥3},其中在摄像机坐标系下对应的坐标集为:p
ci
(x,y,z|)i=1,2,
…
n},二者变换关系为:p
ci
=rp
oi
+t,其中r=[r
11
,r
12
,r
13
,r
21
,r
22
,r
23
,r
31
,r
32
,r
33
],t=[t
11
,t
12
,t
13
]
t
分别为旋转矩阵和平移向量;
[0019]
目标特征点投影在归一化图像平面中,其坐标点集为:{vi=(ui,vi,1)
t
|i=1,2
…
n},设fi是沿着向量v;视线的投影矩阵,则其表达式为:fi=v
ivit
;/v
it
v,那么目标空间中的共线性方程可表述为:
[0020]
p
c’i
=fi(rp
oi
+t)=rp
oi
+t=p
ci
。
[0021]
一种可控的动态led球幕动感影院系统,使用方法如下:
[0022]
fpga可编程门阵列系统控制动感座椅根据led球幕画面进行响应,做出响应的动作,led球幕受fpga可编程门阵列系统的控制放映;fpga可编程门阵列系统控制特效控制模块配合画面及动感座椅动作进行施展特效,iot摄像机对头部特征点坐标进行提取,特征点坐标畸变校正等一系列图像处理后,获取特征点空间坐标与特征点图像坐标的对应关系并利用pnp算法解算头部姿态角,然后利用自适应滤波算法估计更高精度的头部姿态角,最后应用数据融合算法对oit和iot输出的头部姿态角进行数据融合。
[0023]
本发明的上述技术方案具有如下有益的技术效果:
[0024]
通过iot摄像机对头部姿态进行监控,并经过一系列算法的计算,以最终输出监测的值,为后续调整相应处放映调整提供数据收集。
附图说明
[0025]
图1为本发明提出的一种可控的动态led球幕动感影院系统及方法的结构示意图。
[0026]
图2为本发明提出的一种可控的动态led球幕动感影院系统及方法中的结构示意图。
具体实施方式
[0027]
为使本发明的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本发明进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本发明的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本发明的概念。
[0028]
如图1-2所示,本发明提出的一种可控的动态led球幕动感影院系统,包括fpga可编程门阵列系统、动感座椅、led球幕、特效控制模块和iot摄像机;
[0029]
动感座椅与fpga可编程门阵列系统通讯连接,动感座椅用于受pga可编程门阵列系统控制进行动作;
[0030]
led球幕与fpga可编程门阵列系统通讯连接,led球幕用于对画面进行放映;
[0031]
特效控制模块与fpga可编程门阵列系统通讯连接,特效控制模块用于模拟雪花、吹风、烟雾、闪电和入侵效果;
[0032]
fpga可编程门阵列系统通过iot摄像机与iot图像处理算法模块与iot正交迭代算法模块连接,ot正交迭代算法模块通过自适应减速模块与数据整合滤波器连接,用于对头
部姿态数据的采集及输出。
[0033]
一种可控的动态led球幕动感影院系统,使用方法如下:
[0034]
fpga可编程门阵列系统控制动感座椅根据led球幕画面进行响应,做出响应的动作,led球幕受fpga可编程门阵列系统的控制放映;fpga可编程门阵列系统控制特效控制模块配合画面及动感座椅动作进行施展特效,iot摄像机对头部特征点坐标进行提取,特征点坐标畸变校正等一系列图像处理后,获取特征点空间坐标与特征点图像坐标的对应关系并利用pnp算法解算头部姿态角,然后利用自适应滤波算法估计更高精度的头部姿态角,最后应用数据融合算法对oit和iot输出的头部姿态角进行数据融合,使最终获取的头部姿态角精度更高且更稳定可靠。
[0035]
pnp问题的求解方法可分为线性算法和非线性迭代算法“两大类。线性算法速度快,但精度低,适用于精度不高的场合,经典算法有直接线性变换法(dlt)和epnp算法。非线性迭代算法精度很高,经典的算法有lu提出的以目标空间共线性误差为目标函数的正交迭代算法。正交迭代算法精度非常高,而且计算速度可以达到实时性要求。本文使用单目相机的情况下利用正交迭代算法便可以获取罗在文中使用的双目立体视觉定位算法的效果,精简了系统组成。
[0036]
在一个可选的实施例中,iot正交迭代算法模块的算法可选用线性算法和非线性迭代算法。
[0037]
在一个可选的实施例中,特效控制模块包括烟雾机、雪花机、吹风机和频闪灯,进而增加使用的真实性效果。
[0038]
在一个可选的实施例中,特效控制模块还包括入侵单元,入侵单元可用于对腿部进行触碰,增加入侵触碰感。
[0039]
在一个可选的实施例中,fpga可编程门阵列系统通讯连接有烟雾报警器,对火情进行及时感应,提高使用的安全性。
[0040]
在一个可选的实施例中,fpga可编程门阵列系统通讯连接有危险气体传感器,进而及时对危险气体进行感应,并及时响应,提高安全性。
[0041]
在一个可选的实施例中,设不共线的目标特征点的空间坐标集为:{p
oi
(x,y,z)|i=1,2,3
…
n,n≥3},其中在摄像机坐标系下对应的坐标集为:p
ci
(x,y,z|)i=1,2,
…
n},二者变换关系为:p
ci
=rp
oi
+t,其中r=[r
11
,r
12
,r
13
,r
21
,r
22
,r
23
,r
31
,r
32
,r
33
],t=[t
11
,t
12
,t
13
]
t
分别为旋转矩阵和平移向量;
[0042]
目标特征点投影在归一化图像平面中,其坐标点集为:{vi=(ui,vi,1)
t
|i=1,2
…
n},设fi是沿着向量v;视线的投影矩阵,则其表达式为:fi=v
ivit
;/v
it
v,那么目标空间中的共线性方程可表述为:
[0043]
p
c’i
=fi(rp
oi
+t)=rp
oi
+t=p
ci
。
[0044]
本文基于matlab2012a版本进行仿真实验,直接跳过图像特征处理部分利用经验数据对跟踪算法进行仿真。
[0045]
应当理解的是,本发明的上述具体实施方式仅仅用于示例性说明或解释本发明的原理,而不构成对本发明的限制。因此,在不偏离本发明的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。此外,本发明所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修
改例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1