一种车辆环视系统的制作方法
1.本发明涉及车辆技术领域,特别是涉及一种车辆环视系统。
背景技术:
2.车辆全景环视系统是指在汽车周围架设能覆盖车辆周边所有视场范围的多个广角摄像头,对同一时刻采集到的多路视频影像处理成一幅车辆周边360度的车身俯视图,最后在中控台的屏幕上显示,让驾驶员清楚查看车辆周边是否存在障碍物并了解障碍物的相对方位与距离,以帮助驾驶员停泊或启动车辆。
3.但是现有技术的车辆全景环视系统仅仅用于泊车或启动车辆,而不能用于车辆的远程操控,浪费了车辆全景环视系统的资源。
技术实现要素:
4.本发明提供一种车辆环视系统,所述车辆环视系统包括:
5.图像采集单元、图像处理单元、行驶驱动单元、时序校准单元与车载通讯单元,
6.所述图像采集单元包括设置在车辆前端和后端处的前摄像单元、后摄像单元,以及设置在车辆左侧和右侧处的左摄像单元和右摄像单元;其中,前摄像单元、后摄像单元、左摄像单元和右摄像单元均包括两个高度位置相同,且在横向上间隔开的、同规格的两个摄像头,能够用于形成深度图,以确定环境目标相对于车辆的相对距离、相对方位;
7.所述图像处理单元用于对图像采集单元采集的图像进行处理与拼接,形成环视图像;在进行图像拼接时,对于前摄像单元、后摄像单元、左摄像单元和右摄像单元均仅仅选择一路图像信号进行拼接;
8.车载通讯单元,用于与远程操纵装置通讯,以上传图像采集单元采集的图像以及/或者图像处理单元处理后的环视图像;以及用于接收来自远程操纵装置的操控指令;
9.所述行驶驱动单元,用于驱动车载执行单元,实现对车辆的远程操控;
10.所述时序校准单元确定操控延时时长t,其中,
11.t=t2-t1;
12.式中,t1为通过所述车载通讯单元开始上传图像帧的时刻,或者是所述图像采集单元采集图像帧的时刻;
13.t2为通过所述行驶驱动单元对车辆执行单元发出与所述图像帧相对应、来自远程操纵装置的操控指令的时刻。
14.具体地,所述车辆环视系统以下述方法进行远程操控:
15.步骤s1.令t=t0,其中t0为预设的时长阈值;
16.步骤s2.采集当前图像帧及当前图像帧的时间戳ts1,将当前图像帧、当前图像帧的时间戳ts1、操控延时时长t传送至远程操纵装置;
17.步骤s3.远程操纵装置基于当前图像帧和操控延时时长t生成操纵指令occ,将操纵指令occ与当前图像帧的时间戳ts1传送至车载通讯单元;
18.步骤s4.将操纵指令occ与当前图像帧的时间戳ts1传送至行驶驱动单元以驱动车载执行单元,并记录传送时刻ts3;更新t=ts3-ts1,转至步骤s2。
19.具体地,在进行碰撞安全判断时,在车辆的行驶方向上,对车辆增加长度l,l=v*t,且基于增加长度后的虚拟总长度l0+l进行碰撞安全判断,
20.其中,v为车辆的当前运行速度,t为时序校准单元确定的操控延时时长,l0为车辆长度,l0=l01+l02+l03,
21.l01为车辆的前悬长度;l02为车辆的轴距;l03为车辆的后悬长度。
22.具体地,在远程操纵装置的俯视全景环视图像显示屏幕上,对于车辆显示的图像,在车辆的行驶方向上,对车辆增加长度l,
23.l=v*t,
24.其中,v为车辆的当前运行速度,t为时序校准单元确定的操控延时时长。
25.具体地,基于操纵延时时长t,对目标车速vp进行调整,
26.vp=vp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
如果t≦t0
27.vp=vp*t/t0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
如果t0《t≦tmax
28.vp=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
如果t》tmax
29.其中t0、tmax为预设的时长阈值,tmax≦10*t0。
30.具体地,在行驶场景下,在结构化道路上的限速为25km/小时;在非结构化道路上的限速为15km/小时;在转弯场景下的限速为10km/小时,在倒车场景下的限速为5km/小时,在泊车场景下的限速为5km/小时。
31.具体地,基于摄像单元获取的图像来确定目标与车辆的距离,并基于确定的距离来进行俯视环视图的转换,
32.其中,以下述方式确定目标与车辆的距离:
33.步骤s1.基于同一摄像单元的两个摄像头分别同时获取的图像帧序列,形成深度图序列,
34.步骤s2.确定第一摄像头获取的前一图像帧与当前图像帧中的共同目标特征,以及当前图像帧中的新增目标特征;
35.步骤s3.利用前一深度图的深度信息,基于所述当前图像帧,确定所述当前图像帧中的所述共同目标特征与新增目标特征与车辆的相对距离。
36.具体地,在泊车场景下,以下述方式进行远程操控泊车:
37.远程操控车辆前向行驶路过目标车位;
38.基于图像传感器检测的图像,确定目标车位的参数,行车道及障碍物的参数,以及目标泊车位置b,目标泊车位置b靠近目标车位的后端;
39.采用圆弧切圆弧方法进行倒车泊车方式,其中,第一圆弧dc与第二圆弧cb具有相同的圆心角β;第一圆弧dc的转弯半径为r1,第二圆弧cb的转弯半径为r2;
40.设置第二圆弧的终点b、第一圆弧的起点d和终点c为位置节点,位置节点处的目标车速vp为零。
41.具体地,第一圆弧的起点d的位置,即泊车起始点的位置,以下述方式确定:
42.首先,确定目标泊车位置b,具体地,车辆位置以车辆后轴中心位置确定,在目标泊车位置b处,车辆后端与后向车位之间的距离为d、车辆左侧车身与目标车位外边界线平齐;
43.其次,以下述方式确立坐标系:以目标泊车位置b处车辆后轴中心的位置为坐标原点,建立坐标系,其中车辆前向为x方向,车辆左侧方向为y方向,第一圆弧的起点d的位置表示为xd、yd;
44.xd=(r1+r2)sinβ
45.yd=(r1+r2)(1-cosβ)
46.其中,r1=r2=l02*cotθ
47.l02为车辆的轴距;θ为车辆的最大转向角;
48.β基于下述的取值范围取值:
49.arcsin(a/2(l02*cotθ))《β《arccos(1-b/2(l02*cotθ))
50.a为目标车位的长度,即目标车位在x方向上的尺寸,
51.b为目标车位的宽度,即目标车位在y方向上的尺寸。
52.本发明还提供一种车辆,所述车辆包括如上所述的车辆环视系统,所述车辆为在矿区运行的电动货车。
53.本发明还提供车辆环视系统的运行方法。例如,一种车辆环视系统的运行方法,所述车辆环视系统包括:图像采集单元、图像处理单元、行驶驱动单元、时序校准单元与车载通讯单元,
54.所述图像采集单元包括设置在车辆前端和后端处的前摄像单元、后摄像单元,以及设置在车辆左侧和右侧处的左摄像单元和右摄像单元;其中,前摄像单元、后摄像单元、左摄像单元和右摄像单元均包括两个高度位置相同,且在横向上间隔开的、同规格的两个摄像头,能够用于形成深度图,以确定环境目标相对于车辆的相对距离、相对方位;
55.所述图像处理单元用于对图像采集单元采集的图像进行处理与拼接,形成环视图像;在进行图像拼接时,对于前摄像单元、后摄像单元、左摄像单元和右摄像单元均仅仅选择一路图像信号进行拼接;
56.所述车载通讯单元用于与远程操纵装置通讯,以上传图像采集单元采集的图像以及/或者图像处理单元处理后的环视图像;以及用于接收来自远程操纵装置的操控指令;
57.所述行驶驱动单元用于驱动车载执行单元,实现对车辆的远程操控;
58.所述时序校准单元以下述方法确定操控延时时长t,其中,
59.t=t2-t1;
60.式中,t1为通过所述车载通讯单元开始上传图像帧的时刻,或者是所述图像采集单元采集图像帧的时刻;
61.t2为通过所述行驶驱动单元对车辆执行单元发出与所述图像帧相对应、来自远程操纵装置的操控指令的时刻。
附图说明
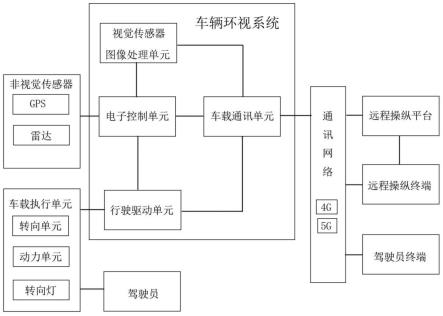
62.图1是根据本发明一实施例的车辆环视系统的示意性方框图。
63.图2是采用根据本发明一实施例的车辆环视系统的货车的示意性侧视图。
64.图3是图2所示货车的示意性俯视图。
65.图4是说明根据本发明一实施例的车辆环视系统在前向形式场景下的运行方式的示意图。
66.图5是根据本发明一实施例的车辆环视系统进行远程操控泊车的行驶路线图。
67.图6是根据本发明一实施例的车辆环视系统进行远程操控的流程图。
68.图7是说明车辆转向时后轮轴中点处的转弯半径与车俩轴距之间关系的示意图。
具体实施方式
69.在附图中,使用相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面结合附图对本发明的实施例进行详细说明。
70.根据本发明实施例的车辆环视系统能够用于在启动、倒车、转向等场景下,向驾驶员提供拼接后的环视图像,以避免或减小观察死角,提高安全性能。
71.而且,根据本发明实施例的车辆环视系统还能够用于自动驾驶。车辆环视系统基于车载视觉传感器获取四周的图像信息(环境信息),并通过通讯网络将图像信息传送给远程平台。借助远程平台(例如云计算平台)配备的强大计算能力,对图像信息进行深度处理,采用神经网络等提取环境信息,规划行驶路线,形成车辆行驶操控指令。
72.例如,提取车道线、马路牙子等道路设置的位置信息;他车(机动车或者非机动车)等动态目标的位置、速度信息;交通锥等静态障碍物的位置、尺寸大小等信息;交通指示灯状态信息;交通指示牌指示的信息等等。此外,还可以基于gps定位,与先验地图中的相应信息进行融合,从而更精确地确定行车环境信息。
73.进一步地,根据本发明实施例的车辆环视系统还能够用于在特定情景下进行远程操控,例如由驾驶员或远程操控平台的操纵员通过通讯网络进行远程操控。所述的特定情境,例如是车辆驾驶员因某种原因不能直接操控车辆;或者在封闭或半封闭环境下的矿山驾驶作业;或者泊车作业等等。
74.根据本发明实施例的车辆环视系统可以适用于任何适当的车辆,例如可以用于轿车、货车等。在一个实施例中,所述车辆环视系统用于电动车辆,例如,所述车辆为电动货车。所述车辆环视系统尤其适于低速行驶的电动车辆。此外,所述车辆环视系统适用于在封闭区域内运行的车辆,例如所述车辆为在矿区运行的电动货车。
75.本发明的具体实施例还提供车辆环视系统的运行方法。车辆环视系统的运行方法在下文中具体结合车辆环视系统进行说明与描述。
76.图1是根据本发明一实施例的车辆环视系统的示意性方框图。图1所示的车辆环视系统包括:多个视觉传感器(图像采集单元)、图像处理单元、行驶驱动单元、时序校准单元(未图示)与车载通讯单元。
77.远程操纵装置、通讯网络也可以作为本发明的车辆环视系统的一部分。
78.参见图2和图3,所述图像采集单元10包括多个视觉传感器。所述多个视觉传感器环绕车辆设置,例如包括设置在车辆前端和后端处的前摄像单元11、后摄像单元14,以及设置在车辆左侧和右侧处的左摄像单元12和右摄像单元13。前摄像单元11、后摄像单元14、左摄像单元12和右摄像单元13均包括两个高度位置相同,且在横向上间隔开的、同规格的两个摄像头。此处,高度方向是指图2的上下方向,即车辆的高度方向。横向,对于左、右摄像单元是指图3图面的左右方向,即车辆的前后方向;对于前、后摄像单元是指图3图面的上下方向,即车辆的左右方向。
79.换句话说,每个摄像单元都包括两个预先标定好的同规格、同参数的摄像头,从
而,能够用于形成深度图,以确定环境目标相对于车辆(自车)的相对距离、相对方位。这样,相较于通常的车辆环视系统而言,除了能够提供环视图像之外,还能够精确地确定环境目标相对于车辆的位置。由此,能够基于摄像单元获取的图像来进行辅助驾驶、自动驾驶、远程操控驾驶。
80.所述图像处理单元用于对图像采集单元采集的图像进行处理与拼接,形成环视图像;在进行图像拼接时,对于前摄像单元、后摄像单元、左摄像单元和右摄像单元均仅仅选择一路图像信号进行拼接。
81.可以理解的是,车辆上还可以设置gps、雷达等车载的非视觉传感器。将所述非视觉传感器采集的信息与视觉传感器采集的信息进行融合,来更好地确定车辆的行驶环境信息。
82.如图所示,所述图像采集单元还包括仰视摄像单元15。所述仰视摄像单元15设置在所述货车车头的上部处,用于在隧道、地下车库场景下,获取天花板上的条码信息,所述条码信息为与条码信息所处位置相对应的定位信息或者警示信息。例如,所述条码信息可以关联隧道的长度、行驶注意事项等信息。
83.所述车载通讯单元用于与远程操纵装置通讯,以上传图像采集单元采集的图像以及/或者图像处理单元处理后的环视图像;以及用于接收来自远程操纵装置的远程操控指令。
84.所述车载通讯单元为远程通讯单元,采用无线方式进行通讯。具体地,通过通讯网络与远程操纵装置通讯。通讯网络例如是4g网络、5g网络或者其他通讯网络。
85.远程操纵装置可以采用任何适当的形式。远程操纵装置一种实施方式为云计算平台,例如包括中央云和边缘云,以降低通讯延时。在图1中,远程操纵装置包括远程操纵平台和远程操纵终端。远程操纵平台进行相应的图像处理、行驶计算,将相应信息输送至远程操纵终端,远程操纵人员基于所述信息输入操作指令。在另一实施例中,远程操纵平台能够自动生成操作指令,远程操纵车辆。仅仅在某些特定或极端的情景下,切换至人工远程操纵方式,引入远程操纵人员,进行车辆的远程操纵。
86.如图所示,远程操纵装置还包括驾驶员终端。驾驶员或者车主可以通过驾驶员终端远程操控车辆。在一个实施例中,驾驶员或者车主通过驾驶员终端连接至远程操纵平台,借助于远程操纵平台的计算能力来对车辆进行远程操纵。在另一个实施例中,驾驶员或者车主通过驾驶员终端直接连接至车辆,进行车辆环视观察、车辆启动、熄火等操作。
87.因为网络通讯和图像处理需要一定的时间,接受到的远程操控指令与相应的图像之间存在延时。所述延时影响车辆的安全行驶。为此,本发明的车辆环视系统设置有时序校准单元。时序校准单元未图示。时序校准单元可以采用任何适当的形式,例如是相对独立的电路与软件,还可以集成在电子控制单元中。
88.所述时序校准单元确定操控延时时长t,其中,
89.t=t2-t1。
90.式中,t1为通过所述车载通讯单元开始上传图像帧的时刻,或者是所述图像采集单元采集图像帧的时刻。图像采集单元采集图像帧的时刻,就是指某一图像帧被采集的时刻。可以通过采集图像时,与图像同步生成时间戳(例如表示时刻ts1的数字编码,其中ts1表示t1)的方式来实现。所述时间戳与图像帧打包在一起,随着图像帧一起上传。通过所述
车载通讯单元开始上传图像帧的时刻,就是指某一图像帧由车载通讯单元上传的时刻。
91.t2为通过所述行驶驱动单元对车辆执行单元发出与所述图像帧相对应、来自远程操纵装置的操控指令的时刻。
92.在远程操纵装置生成远程操控指令的时候,可以与操控指令同步生成时间戳(例如表示时刻ts1、ts2的数字编码;或者仅仅表示时刻ts1的数字编码)。所述时间戳与操控指令打包在一起,随着操控指令一起传送回车辆。
93.车载通讯单元或者车辆的电子控制单元在将操控指令发送至行驶驱动单元时,记录发送时刻ts3。其中,将ts3作为t2。
94.t1和t2都是在车载单元上生成的,不需要车载单元与系统平台的时间校准,从而可以避免车载单元与系统平台的计时偏差导致的时序计算偏差。
95.车载执行单元也可以称为车辆行驶单元。车载执行单元例如可以包括动力单元(发动机或电动机)、转向单元等,用于进行纵向速度或加速度与横向速度或加速度的控制。车载执行单元还可以包括转向灯、喇叭等提示装置。
96.确定的操控延时时长t,能够发送至远程操纵装置,用于进行碰撞安全判断等。
97.在本发明的一个实施例中,操控延时时长t以下述方式确定。或者,本发明实施例的车辆环视系统以下述方法方式进行远程操控。
98.步骤s1.令t=t0,其中t0为预设的时长阈值。t0可以根据车型及车辆行驶场景等预先确定。在一个可选实施例中,t0为100毫秒或200毫秒。
99.步骤s2.采集当前图像帧及当前图像帧的时间戳ts1,将当前图像帧、当前图像帧的时间戳ts1、操控延时时长t打包传送至远程操纵装置。图像帧由图像传感器采集。时间戳ts1可以由图像传感器在采集图像时获取,也可以由图像处理单元添加。
100.步骤s3.远程操纵装置基于当前图像帧和操控延时时长t生成操纵指令occ,将操纵指令occ与当前图像帧的时间戳ts1打包传送至车载通讯单元。
101.步骤s4.将操纵指令occ与当前图像帧的时间戳ts1传送至行驶驱动单元以驱动车载执行单元,并记录传送时刻ts3。更新t=ts3-ts1,转至步骤s2。
102.在本发明的一个实施例中,在进行碰撞安全判断时,在车辆的行驶方向上,对车辆增加长度l,l=v*t,且基于增加长度后的虚拟总长度l0+l进行碰撞安全判断,
103.其中,v为车辆的当前运行速度(纵向行驶速度),t为时序校准单元确定的操控延时时长,l0为车辆长度,l0=l01+l02+l03,
104.参见图7,l01为车辆的前悬长度;l02为车辆的轴距;l03为车辆的后悬长度。
105.在本发明的一个可选实施例中,在由远程操纵人员进行操纵的情况下,在远程操纵装置(远程操纵终端)的俯视全景环视图像显示屏幕上,对于车辆显示的图像,在车辆的行驶方向上,对车辆增加长度l,
106.l=v*t,
107.其中,v为车辆的当前运行速度,t为时序校准单元确定的操控延时时长。
108.在本发明的一个备选实施例中,基于操纵延时时长t,对车速进行调整。具体地,以下式基于操纵延时时长t,对目标车速vp进行调整,
109.vp=vp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
如果t≦t0
110.vp=vp*t/t0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
如果t0《t≦tmax
111.vp=0
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
如果t》tmax
112.其中t0、tmax为预设的时长阈值,tmax≦10*t0。
113.本发明的车辆环视系统适于在低速下运行。例如,在行驶场景下,在结构化道路上的限速为25km/小时;在非结构化道路上的限速为15km/小时;在转弯场景下的限速为10km/小时,在倒车场景下的限速为5km/小时,在泊车场景下的限速为5km/小时。
114.在本发明的实施例中,基于摄像单元获取的图像来确定目标与车辆的距离,并基于确定的距离来进行俯视环视图的转换。具体地,以下述方式确定目标与车辆的距离:
115.步骤s1.基于同一摄像单元的两个摄像头分别同时获取的图像帧序列,形成深度图序列,
116.步骤s2.确定第一摄像头获取的前一图像帧与当前图像帧中的共同目标特征,以及当前图像帧中的新增目标特征;
117.步骤s3.利用前一深度图的深度信息,基于所述当前图像帧,确定所述当前图像帧中的所述共同目标特征与新增目标特征与车辆的相对距离。
118.因为是利用前一深度图的深度信息结合当前图像帧来进行目标与车辆距离或相对位置的计算,从而有利于节省时间。
119.本发明实施例的车辆环视系统适用于低速行驶场景。具体地,在低速行驶场景下,以下述方式进行速度规划。
120.根据全景环视拼接装置得到的障碍物信息以及地图信息建立道路模型,对当前车道进行区域划分,将车辆正前方长度为s1+s2、宽度为w当前车道区域划分为刹车区域和减速区域;车辆正前方长度为s1、宽度为w的区域为刹车区域,位于刹车区域前方长度为s2、宽度为w的区域为减速区域。刹车区域、减速区域与车道左侧的距离为w1,刹车区域、减速区域与车道右侧的距离为w2。
121.其中,w=w0*k01+l0*k02,w0为车辆的最大宽度;l0为货车的长度;k01、k02为设定系数。例如,k01为大于1的常数,可以取1.1,也可以基于车速确定。k02例如为0.01-0.05范围内的常数。
122.s1为车辆从当前行驶车速以最大减速度制动到停车的刹车距离。
123.s2=k1*s1;k1为设定系数;k1例如可以为0.5-1的常数。
124.其次,根据检测到的障碍物的位置来进行纵向速度规划,确定目标纵向速度vp,
125.若检测到位于刹车区域内的障碍物,vp=0;此时,可以施加最大的减速度。
126.若检测到位于减速区域内的障碍物,vp=v*(s-l1)/l2,s为障碍物与车辆之间的距离;v为当前纵向速度;此时,可以施加最大的减速度,或者较小一些的减速度,根据控制策略来选择。
127.最后,如果-0.3《(w1-w2)/(w1+w2)《0.3,确定目标横向速度vc,
128.vc=v01*(w1-w2)/(w1+w2),其中v01为基于车辆性能预先设定的横向速度。此时,可以根据控制策略来选择相应的转角或横向加速度。
129.本发明实施例的车辆环视系统适用于泊车场景。具体地,在泊车场景下,以下述方式进行远程操控泊车。
130.参见图5和图7,a1、a2、a3、a4分别为车辆的左后点、右后点、右前点和左前点。m为前轴中点、n为后轴中点。mp垂直于转向轮的转角。p为直线mp与后轴延长线的交点。目标车
位位于前向车位和后向车位之间。在前向车位和后向车位中已经停有车辆、或者没有停放车辆。目标车位的长度为a,宽度为b。
131.在进行泊车行驶路线的确定与校核过程中,假设前向车位和后向车位中已经停有车辆,且停有的车辆没有侵入至当前车位中。
132.在进行路线校核过程中,以车辆不与前向车位和后向车位进行干涉为基准。
133.首先,远程操控车辆前向行驶路过目标车位;既从图5的左侧向右侧行驶经过目标车位。
134.在行驶的过程中,基于图像传感器检测的图像,确定目标车位的参数,包括但不限于a、b;行车道及障碍物的参数,包括但不限于行车道宽度h,以及目标泊车位置b,目标泊车位置b靠近目标车位的后端。
135.选择采用圆弧切圆弧方法进行倒车泊车方式,其中,第一圆弧dc与第二圆弧cb具有相同的圆心角β;第一圆弧dc的转弯半径为r1(圆心为o1),第二圆弧cb的转弯半径为r2(圆心为o2)。
136.设置第二圆弧的终点b、第一圆弧的起点d和终点c为位置节点,位置节点处的目标车速vp为零。从而,可以消除基于操控延时时长t对安全校核的影响。而且,便于进行转向操作。由此,提高车辆行驶的安全性。
137.具体地,第一圆弧的起点d的位置,即泊车起始点的位置,以下述方式确定:
138.首先,确定目标泊车位置b(参见图5),具体地,车辆位置以车辆后轴中心位置确定,在目标泊车位置b处,车辆后端与后向车位之间的距离为d、车辆左侧车身与目标车位外边界线平齐。
139.其次,以下述方式确立坐标系:以目标泊车位置b处车辆后轴中心的位置为坐标原点,建立坐标系,其中车辆前向为x方向,车辆左侧方向为y方向,第一圆弧的起点d的位置表示为xd、yd;
140.xd=(r1+r2)sinβ
141.yd=(r1+r2)(1-cosβ)
142.其中,令r1=r2;
143.参见图7,采用最大转向角进行转弯,
144.从而r1=r2=r
min
=l02*cotθ
145.其中,l02为车辆的轴距;θ为车辆的最大转向角。
146.令xd大于目标车位的长度a,
147.从而,β》arcsin(a/2(l02*cotθ))
148.令yd大于目标车位的宽度a,严格而言,应该是大于车辆的宽度w0,而w0大体上相当于目标车位的宽度;
149.从而,β《arccos(1-b/2(l02*cotθ))
150.所以,β基于下述的取值范围取值:
151.arcsin(a/2(l02*cotθ))《β《arccos(1-b/2(l02*cotθ))
152.其中,a为目标车位的长度,即目标车位在x方向上的尺寸,
153.b为目标车位的宽度,即目标车位在y方向上的尺寸。
154.最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。本
领域的普通技术人员应当理解:可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1