初始化性能测试方法、装置、计算机设备及存储介质与流程
本公开涉及信息处理,具体而言,涉及一种初始化性能测试方法、装置、计算机设备及存储介质。
背景技术:
1、在增强现实(augmented reality,ar)场景下,为了确保增强现实设备的ar展示效果,需要对增强现实设备进行实时定位,在增强现实设备刚开始启动增强现实系统时,需要对增强现实系统的定位算法进行初始化,初始化的快慢和质量影响着增强现实设备前期的ar展示效果,因此如何对定位算法的初始化性能进行测试成为亟待解决的技术问题。
技术实现思路
1、本公开实施例至少提供一种初始化性能测试方法、装置、计算机设备及存储介质。
2、第一方面,本公开实施例提供了一种初始化性能测试方法,包括:
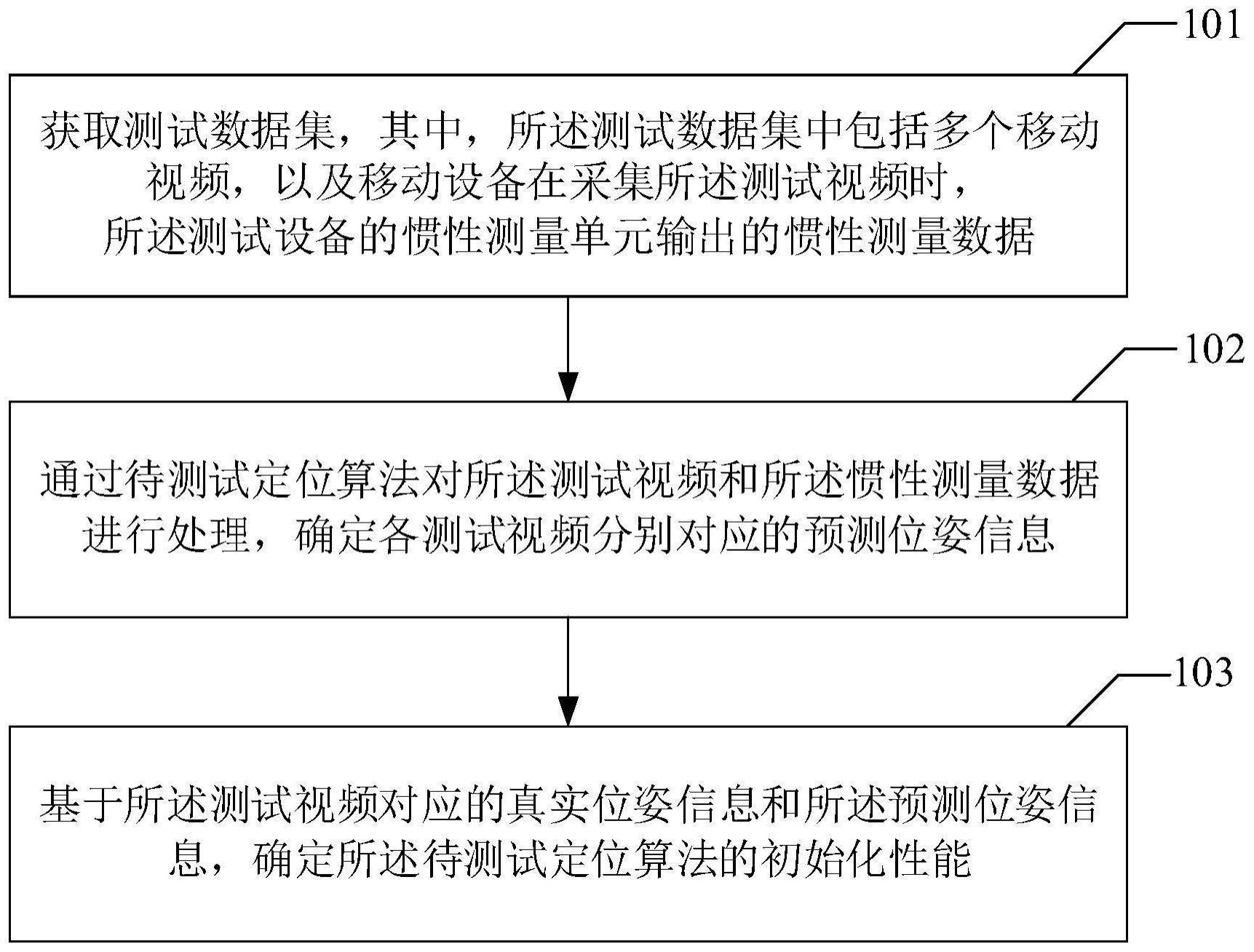
3、获取测试数据集,其中,所述测试数据集中包括多个测试视频,以及移动设备在采集所述测试视频时,所述移动设备的惯性测量单元输出的惯性测量数据;
4、通过待测试定位算法对所述测试视频和所述惯性测量数据进行处理,确定各测试视频分别对应的预测位姿信息;
5、基于所述测试视频对应的真实位姿信息和所述预测位姿信息,确定所述待测试定位算法的初始化性能。
6、上述方法中,可以基于测试视频对应的真实位姿信息和基于待测试定位算法确定的预测位姿信息,对待测试定位算法的初始化性能进行分析,由此可以通过数据直观的展示待测试定位算法的初始化能力。
7、一种可能的实施方式中,所述基于所述测试视频对应的真实位姿信息和所述预测位姿信息,确定所述待测试定位算法的初始化性能,包括:
8、基于所述测试视频对应的真实位姿信息和所述预测位姿信息,确定所述待测试定位算法在至少一种初始化性能参数下的参数信息;所述初始化性能参数包括初始化时间、初始化误差、初始化质量中的至少一种。
9、通过对初始化时间、初始化误差以及初始化质量等多个方面对于待测试定位算法的初始化性能进行评估,可以实现对于待测试定位算法的初始化性能的全面检测。
10、一种可能的实施方式中,在所述初始化性能参数包括初始化时间的情况下,基于所述测试视频对应的真实位姿和所述预测位姿,确定所述待测试定位算法的初始化性能,包括:
11、针对任一测试视频,基于该测试视频的真实位姿和预测位姿,确定该测试视频对应的位姿变换比例;所述位姿变换比例用于指示所述测试视频的真实位姿和预测位姿之间的差异;
12、基于该测试视频对应的位姿变换比例,确定该测试视频的各视频帧对应的误差比例;其中,所述误差比例用于表征各视频帧和各视频帧之前的其他视频帧的预测位姿与真实位姿之间的误差,对于所述测试视频的整体位姿误差的影响;
13、基于所述误差比例和预设影响阈值,确定所述该测试视频的初始化时间;
14、将各测试视频的初始化时间的均值作为所述待测试定位算法的初始化时间。
15、通过这种方法,可以准确计算出待测试定位算法的初始化时间,便于对待测试定位算法的初始化性能进行准确评估。
16、一种可能的实施方式中,在所述初始化性能参数包括初始化误差的情况下,基于所述测试视频对应的真实位姿和所述预测位姿,确定所述待测试定位算法的初始化性能,包括:
17、针对任一测试视频,基于该测试视频在初始化时间对应的位姿变换比例和真值变换比例,确定各测试视频对应的初始化误差;
18、将各测试视频的初始化误差的均值作为所述待测试定位算法的初始化误差。
19、通过这种方法,可以准确计算出待测试定位算法的初始化误差,便于对待测试定位算法的初始化性能进行准确评估。
20、一种可能的实施方式中,在所述初始化性能参数包括初始化质量的情况下,基于所述测试视频对应的真实位姿和所述预测位姿,确定所述待测试定位算法的初始化性能,包括:
21、基于所述测试视频对应的真实位姿和所述预测位姿确定初始化时间和初始化误差;
22、基于所述初始化误差和所述初始化时间确定所述待测试定位算法的初始化质量。
23、基于初始化误差和初始化时间来确定初始化质量,可以使得最终确定的初始化质量既考虑了初始化误差的影响,又考虑了初始化时间的影响,便于准确对待测试定位算法的初始化性能进行评估。
24、一种可能的实施方式中,所述方法还包括:
25、获取各个所述初始化性能参数分别对应的评价条件;
26、基于在各个所述初始化性能参数下的参数信息和所述评价条件,确定所述待测试定位算法的初始化性能的测试结果。
27、一种可能的实施方式中,所述待测试定位算法包括slam算法。
28、第二方面,本公开实施例还提供一种初始化性能测试装置,包括:
29、获取模块,用于获取测试数据集,其中,所述测试数据集中包括多个测试视频,以及移动设备在采集所述测试视频时,所述移动设备的惯性测量单元输出的惯性测量数据;
30、处理模块,用于通过待测试定位算法对所述测试视频和所述惯性测量数据进行处理,确定各测试视频分别对应的预测位姿信息;
31、确定模块,用于基于所述测试视频对应的真实位姿信息和所述预测位姿信息,确定所述待测试定位算法的初始化性能。
32、一种可能的实施方式中,所述确定模块,在基于所述测试视频对应的真实位姿信息和所述预测位姿信息,确定所述待测试定位算法的初始化性能时,用于:
33、基于所述测试视频对应的真实位姿信息和所述预测位姿信息,确定所述待测试定位算法在至少一种初始化性能参数下的参数信息;所述初始化性能参数包括初始化时间、初始化误差、初始化质量中的至少一种。
34、一种可能的实施方式中,在所述初始化性能参数包括初始化时间的情况下,所述确定模块,在基于所述测试视频对应的真实位姿和所述预测位姿,确定所述待测试定位算法的初始化性能时,用于:
35、针对任一测试视频,基于该测试视频的真实位姿和预测位姿,确定该测试视频对应的位姿变换比例;所述位姿变换比例用于指示所述测试视频的真实位姿和预测位姿之间的差异;
36、基于该测试视频对应的位姿变换比例,确定该测试视频的各视频帧对应的误差比例;其中,所述误差比例用于表征各视频帧和各视频帧之前的其他视频帧的预测位姿与真实位姿之间的误差,对于所述测试视频的整体位姿误差的影响;
37、基于所述误差比例和预设影响阈值,确定所述该测试视频的初始化时间;
38、将各测试视频的初始化时间的均值作为所述待测试定位算法的初始化时间。
39、一种可能的实施方式中,在所述初始化性能参数包括初始化误差的情况下,所述确定模块,在基于所述测试视频对应的真实位姿和所述预测位姿,确定所述待测试定位算法的初始化性能时,用于:
40、针对任一测试视频,基于该测试视频在初始化时间对应的位姿变换比例和真值变换比例,确定各测试视频对应的初始化误差;
41、将各测试视频的初始化误差的均值作为所述待测试定位算法的初始化误差。
42、一种可能的实施方式中,在所述初始化性能参数包括初始化质量的情况下,所述确定模块,在基于所述测试视频对应的真实位姿和所述预测位姿,确定所述待测试定位算法的初始化性能时,用于:
43、基于所述测试视频对应的真实位姿和所述预测位姿确定初始化时间和初始化误差;
44、基于所述初始化误差和所述初始化时间确定所述待测试定位算法的初始化质量。
45、一种可能的实施方式中,所述确定模块,还用于:
46、获取各个所述初始化性能参数分别对应的评价条件;
47、基于在各个所述初始化性能参数下的参数信息和所述评价条件,确定所述待测试定位算法的初始化性能的测试结果。
48、一种可能的实施方式中,所述待测试定位算法包括slam算法。
49、第三方面,本公开实施例还提供一种计算机设备,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当计算机设备运行时,所述处理器与所述存储器之间通过总线通信,所述机器可读指令被所述处理器执行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
50、第四方面,本公开实施例还提供一种计算机可读存储介质,该计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行上述第一方面,或第一方面中任一种可能的实施方式中的步骤。
51、关于上述初始化性能测试装置、计算机设备、及计算机可读存储介质的效果描述参见上述初始化性能测试方法的说明,这里不再赘述。
52、为使本公开的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!