结合序列局部信息与多序列关联关系的交通流量预测方法与流程
1.本发明属于数据挖掘与智能交通领域,具体涉及一种结合序列局部信息与多序列关联关系的交通流量预测方法。
背景技术:
2.随着生活水平的提高和城市交通的发展,快速增加的出行需求带来了一系列的交通问题,道路拥堵、交通事故等问题频发。在此背景下,建立有效的智能交通系统是辅助交通机构制定科学管理决策的重要内容,其中如何实现交通流量的准确预测是智能交通系统的重要组成部分。精准的交通流量预测能够协助制定实时控制策略,对交通的科学管理规划和居民安全高效出行具有重要意义。
3.交通流量预测指通过对历史流量数据的分析挖掘来预测未来的交通流量。目前国内外的研究人员进行交通流量的预测方法主要可以分为基于统计学习的方法、基于传统机器学习的方法和基于深度学习的方法。
4.基于统计学习方法的典型代表是历史平均(history average,ha)方法,该方法通过计算历史同期流量的平均值作为当前预测值,但其不适合动态变化的交通流量数据;差分平均移动自回归(autoregressive integrated moving strategy,arima)是另外一种典型的基于统计学的方法,该方法通过将不平稳的序列通过差分转换为平稳序列进行预测;然而,上述基于统计学习方法的预测模型的效果严重依赖数据质量。
5.由于交通流量存在着显著的非线性和不确定性的特征,机器学习方法也广泛应用于交通流量预测,如k近邻(k nearest neighbors,knn)算法、贝叶斯模型以及支持向量回归(support vector regression,svr)算法等。虽然机器学习方法能够建模数据间的非线性关系,但其对于数据特征的要求较高,往往需要繁杂的特征处理。
6.由于深度神经网络能够有效建模高维时空数据关系且无需复杂的人工特征工程,深度学习近年来被广泛应用于交通流量预测。例如,长短期记忆网络(long and short-term memory network,lstm)类方法考虑了流量之间的依赖关系,卷积神经网络(convolutional neural network,cnn)类方法初步考虑不同流量数据之间的时空依赖关系,但其对空间依赖关系的建模较为粗糙,很难实现对交通路网数据的有效表达。图神经网络(graph neural network,gnn)凭借其强大的非欧空间建模能力,能够在路网数据基础上实现流量数据时空特征的有效建模,已成为当前进行交通流量预测的主要手段之一,当前进行交通流量预测主要使用的是gnn中的图卷积网络(graph convolution network,gcn)。
7.然而,当前交通流量预测方法通常将不同流量序列进行整体建模以考虑序列之间的全局关系,或者只考虑流量序列本身的动态变化,缺乏将两者进行结合、挖掘流量数据中蕴含的潜在信息以提升交通流量预测精度的工作;此外,现有的基于gcn的方法所依赖的静态图难以准确反映不同节点之间随时间变化的动态相关关系。
技术实现要素:
8.鉴于现存交通流量预测工作所提取的交通流量信息难以有效利用数据中的复杂模式与动态关联关系的问题,本发明通过将流量历史序列本身的动态变化信息和多个流量序列之间的全局关系信息结合,提出了一种结合序列局部信息和多序列关联关系的交通流量预测方法,并在全局关系信息的提取过程中考虑不同序列随时间变化的动态关系,实现准确的交通流量预测。
9.本发明的具体步骤:
10.步骤(1).获取n个流量传感器在t个时刻的历史交通流量形成交通流量数据集。
11.步骤(2).根据传感器的地理位置形成有向路网图g(s,e),其中s是有向图中的顶点集合且每个顶点表示一个流量传感器,e是有向图中有向边的集合。
12.步骤(3).提取序列局部信息,将历史流量数据输入长短期记忆网络(long and short-term memory network,lstm)中,得到序列局部信息c
l
。
13.步骤(4).提取多序列关联关系信息,包括以下子步骤:
14.步骤(4.1).基于路网g(s,e)确定不同传感器之间的地理位置邻接矩阵ag;
15.步骤(4.2).根据图上各节点的历史流量数据形成历史流量相关矩阵a
t
;
16.步骤(4.3).将地理位置邻接矩阵ag和历史流量邻接矩阵a
t
结合形成动态邻接矩阵ad;
17.步骤(4.4).将动态邻接矩阵ad和历史流量数据输入图卷积网络(graph convolution network,gcn)中得到多序列关联关系信息cg;
18.步骤(5).将基于lstm提取得到的序列局部信息c
l
和基于gcn提取得到的多序列关联关系信息cg基于门控机制进行信息融合得到最终的信息表示c;
19.步骤(6).多尺度交通流量预测,包括以下子步骤:
20.步骤(6.1).确定将要进行流量预测的时刻个数k,基于此选择k个1
×
1的卷积核;
21.步骤(6.2).将k个不同的卷积核应用在c上,得到k个时刻的交通流量预测结果。
22.本发明具有的有益效果:在多序列关联关系的提取过程中,考虑到现有基于gcn的方法多数只建模了单个静态图,本发明在传统的基于地理位置邻接矩阵的基础上结合随时间动态变化的历史流量关系相关矩阵形成动态邻接矩阵,通过动态邻接矩阵构建动态的序列关系图以实现更加准确有效的交通流量预测。
附图说明
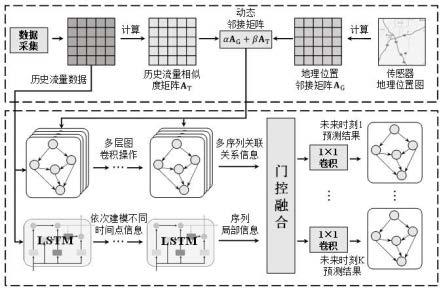
23.图1为本发明方法流程图;
24.图2为lstm示意图。
具体实施方式
25.本发明针对当前流量预测方法仅考虑不同序列(节点、传感器)之间的全局关系且将这种全局关系看成一种静态的关系,或者只考虑流量序列本身的动态变化的缺陷,设计了一种结合序列局部信息和多序列关联关系的交通流量预测方法。
26.下面将对本发明所设计的一种基于序列与序列关系建模的交通流量预测方法做具体说明,方法的执行过程如图1所示。
27.为叙述方便,定义相关符号如下:
28.流量矩阵n个传感器在t个时间点的历史交通流量形成的流量矩阵。
29.路网g(s,e)是一个有向图,其中s是有向图中的顶点集合,顶点v∈s,表示不同的传感器。e是有向图中有向边的集合,有向边e∈e,当两个传感器在一定的距离阈值d内且存在上下游之间的关系时,从上游的传感器出发连接下游的传感器生成一条有向边。
30.在时刻t,所有的传感器的当前时刻流量组成的向量所有的传感器的当前时刻流量组成的向量表示流量矩阵v中的一列,其中表示t时刻第i个传感器的流量。
31.传感器i在所有时刻形成的流量序列为表示流量矩阵v中的一行,每次训练时截取其长为w的一段,所有传感器截取的流量形成的矩阵q为v的子矩阵之一。
32.本发明的具体步骤如下:
33.步骤(1).数据采集:获取n个传感器t个时间点的历史交通流量形成历史流量矩阵v。
34.步骤(2).根据传感器的地理位置形成路网g(s,e),设置时间窗口为w。
35.步骤(3).提取序列局部信息,根据时间窗口w获取w个时间步的所有传感器的流量x
t-w+1
,
…
,x
t
。如图2所示,将每个时刻所有传感器当前时刻流量构成的向量x
t
依次输入长短期记忆网络(long and short-term memory network,lstm)单元,lstm单元结合前一时刻的隐藏向量h
t-1
和单元状态向量c
t-1
得到当前时刻输出的隐藏向量h
t
和单元状态向量c
t
。整个过程的计算步骤为:
36.i
t
=σ(w
xi
x
t
+w
hiht-1
+bi)#(3.1)
37.f
t
=σ(w
xf
x
t
+w
hfht-1
+bf)#(3.2)
38.o
t
=σ(w
xo
x
t
+w
hoht-1
+bo)#(3.3)
39.c
t
=f
t
⊙ct-1
+i
t
⊙
tanh(w
xc
x
t
+w
hcht-1
+bc)#(3.4)
40.h
t
=o
t
⊙
tanh(c
t
)#(3.5)
41.其中i
t
,f
t
,o
t
,分别表示t时刻的输入门、遗忘门和输出门,w表示可学习的参数矩阵,bi,bf,bo,bc表示偏置向量,σ表示sigmoid激活函数,tanh表示双曲正切激活函数,
⊙
表示同位元素相乘。
42.将所有时刻输出的隐藏向量h
t
进行拼接作为提取得到的序列局部信息c
l
。
43.步骤(4).提取多序列关联关系信息
44.步骤(4.1).在有向图g(s,e)的基础上,得到地理位置邻居矩阵具体的,若传感器i和传感器j之间存在一条由i指向j的有向边,则邻接矩阵中的第i行第j列的元素即ag[i][j]设为1,否则设为0。
[0045]
步骤(4.2).基于历史交通流量数据建模动态的历史流量相关矩阵a
t
。具体的,a
t
[i][j]表示传感器i和传感器j之间的历史流量相似度,其计算方式为
[0046][0047]
其中表示第i个传感器截取历史流量序列的平均流量,a
t
[i][j]的绝对值越接近
1,表示传感器i和传感器j之间的历史流量相似度越高。
[0048]
步骤(4.3).现有基于图卷积网络(graph convolution network,gcn)的流量预测方法通常利用节点之间的距离建立静态图,但忽略不同时间点节点之间的相关性存在变化的情况。本发明在基于距离的邻接矩阵的基础上结合基于不同节点历史交通流量数据建立的动态历史流量相关矩阵形成不同时刻不同的动态邻接矩阵
[0049]ad
=αag+βa
t
#(4.2)
[0050]
其中α,β表示权值系数。特别的,由于ag上为0的元素表示两个节点在距离上不相邻或者不存在流量的流向关系,因此对于ag上为0的元素,在最终的动态邻接矩阵ad的对应位置上同样保持为0。
[0051]
步骤(4.4).将上述动态邻接矩阵ad和各节点的历史流量向量q输入gcn中,得到多序列关联关系信息cg;在gcn中,节点的更新公式为:
[0052][0053]
其中表示度矩阵,表示单位矩阵,表示第l层所有节点信息构成的矩阵,表示第l层可学习的参数矩阵,特别的,h
(0)
=q。
[0054]
整张图共更新l次,得到h
(l)
表示所有节点更新后信息集合,即为最终的序列关联关系信息cg。
[0055]
步骤(5).将基于lstm提取得到的序列局部信息c
l
和基于gcn提取得到的多序列关联关系信息cg基于门控机制进行信息融合得到最终的信息表示c。信息融合过程为:
[0056]
首先通过门控机制获得权重gc:
[0057]
gc=σ(w
gcg
+w
lcl
+bc)#(4.4)
[0058]
其中wg,为门控机制中可学习的参数矩阵,bc为偏置向量。
[0059]
然后根据学习到的权重gc,将序列局部信息c
l
和多序列关联关系信息cg进行融合得到最终的信息表示c:
[0060]
c=gc⊙cg
+(1-gc)
⊙cl
#(4.5)
[0061]
步骤(6).在得到最终的信息表示c后,根据需求进行多尺度交通流量预测。
[0062]
步骤(6.1).假设当前时刻为t,目标为预测t时刻后k个时刻的交通流量,则选择k个不同的1
×
1卷积核k1,
…
,kk;
[0063]
步骤(6.2).将k个不同的卷积核应用在c上,得到未来k个时刻的交通流量预测结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1