一种基于测量密集星场的天文望远镜像场畸变标定方法
1.本发明涉及天文望远镜检测和标定技术领域,具体涉及一种基于测量密集星场的天文望远镜像场畸变标定方法。
背景技术:
2.天文望远镜的像场畸变是由望远镜成像的系统性畸变、探测器靶面的倾斜和量度坐标系本身的系统误差等因素共同引起。并且,望远镜的像场畸变模式并不固定,会随环境温度变化(光学系统热胀冷缩变形),也将随着望远镜指向变化(镜头弯沉引起形变,探测器位移引起焦点变化)而变化。因此实验室标定的像场畸变模型无法准确应用到实际观测中,需要研究望远镜实测工况下的像场畸变模型求解和标定方法。
3.随着高精度gaia星表的发布,基于密集星场观测的望远镜像场畸变模型的求解成为了可能,gaia星表的星象测量精度为毫角秒至微角秒级,而地面望远镜的分辨率一般在角秒至亚角秒级,在精度上完全能够满足畸变模型求解的需求;并且gaia星表暗至21等,可提供数量充足的参考星,基于大量参考星的平均,可进一步弥补星象位置测量的随机误差,提高像场畸变模型的解算精度。
技术实现要素:
4.发明目的:本发明目的在于提供一种基于测量密集星场的天文望远镜像场畸变标定方法,基于高精度参考星表和望远镜底片模型求解,能有效解决天文望远镜实测工况下的像场畸变模型求解问题。
5.技术方案:本发明所述基于测量密集星场的天文望远镜像场畸变标定方法,包括如下步骤:
6.s1、选取合适的恒星密集天区为对象,进行图像采集;
7.s2、对采集的多帧图像进行星象检测,筛选出合适的候选星象;
8.s3、将包含候选星象的星图与参考星表进行匹配和证认,匹配证认全视场内参考星,并对匹配证认结果进行核查;
9.s4、将步骤s3获得的参考星进行坐标系转换,由星表位置转换到观测位置;
10.s5、构建底片模型,并计算每颗参考星的底片模型残差,获得观测图像的底片模型残差:
11.s51、在星图中以图像中心c为原点建立一个直角坐标系,纵轴η为赤纬圈的投影,取赤纬增加的方向为正向,横轴ξ垂直于η轴,取赤经增加的方向为正向,从而构建望远镜观测的理想坐标系c-ξη;将参考星的赤道坐标(α,δ)转换到理想坐标,转换公式如式(1):
12.13.其中(α0,δ0)为观测图像中心对应的赤道坐标;
14.s52、基于多项式模型采用最小二乘法解算底片模型参数(a
ij
,b
ij
),公式如式(2):
[0015][0016]
其中(x,y)为参考星在观测图像中的量度坐标;
[0017]
s53、将底片模型参数作用于参考星的理想坐标,计算参考星的理论量度坐标,将参考星的实测量度坐标减去理论量度坐标,即可得到参考星的位置残差,观测图像中所有参考星的位置残差构成该观测图像的底片模型残差;
[0018]
s6、根据底片模型残差大小初步评估望远镜畸变量级,设定畸变模型网格;根据底片模型残差获得畸变模型:
[0019]
s61、根据底片模型残差大小评估像场畸变程度,然后根据探测器像素数量及像场畸变程度划分网格,每个畸变模型网格点包含若干个像素,畸变程度越高,畸变模型网格点应越密,即包含的像素越少;
[0020]
s62、将网格点范围内所有参考星的底片模型残差合并,得到该网格点对应的像场畸变分量;
[0021]
s7、利用畸变模型修正参考星量度坐标并迭代求解底片模型和畸变模型,直至底片模型残差中的系统差部分收敛至较小量级:
[0022]
s71、基于步骤s62所求得的像场畸变分量,利用双线性插值方法求得每个星象的畸变量并做修正,假设待修正的星象的量度坐标为(x0,yo),搜索距离该星象最近的4个像场畸变的网格点量度坐标为:(fd_xi,fd_yj),(fd_x
i+1
,fd_yj),(fd_xi,fd_y
j+1
),(fd_x
i+1
,fd_y
j+1
),对应的像场畸变量为:(fd_dx
i,j
,fd_dy
i,j
),(fd_dx
i+1,j
,fd_dy
i+1,j
),(fd_dx
i,j+1
,fd_dy
i,j+1
),(fd_dx
i+1,j+1
,fd_dy
i+1,j+1
);
[0023]
s72、在x方向进行线性插值,求得(x0,fd_yj)和(x0,fd_y
j+1
)处畸变量(fd_dx
0,j
,fd_dy
0,j
),(fd_dx
0,j+1
,fd_dy
0,j+1
),插值方法如式(3)~式(4):
[0024][0025][0026]
s73、在y方向进行线性插值,以(fd_dx
0,j
,fd_dy
0,j
)和(fd_dx
0,j+1
,fd_dy
0,j+1
)为插值端点,求得(x0,yo)处的畸变量(dx,dy),插值方法如式(5):
[0027]
[0028]
s74、修正所有参考星星象量度坐标为(x0+dx,yo+dy);
[0029]
s75、利用参考星星象的修正坐标迭代执行步骤s6~s7,直至像场畸变模型在各网格点的分量变化差异小于阈值,则认为像场畸变模型收敛,并最终输出保存。
[0030]
本发明进一步优选地技术方案为,步骤s1选取合适的恒星密集天区为对象,进行图像采集的具体方法为:
[0031]
s11、根据银河系中心的坐标以及望远镜当地的地理经纬度与海拔预报银心位置序列;
[0032]
s12、设置曝光时间,使星象因周日视运动引起的拖长控制在星象半宽的范围内;选择在银河系中心靠近天顶处时,以银河系中心为对象,连续采集多帧图像。
[0033]
作为优选地,步骤s2对采集的多帧图像进行星象检测,筛选出合适的候选星象的具体方法为:
[0034]
s21、对所有观测图像以连通域方法进行星象检测,并以重心法计算星象中心;
[0035]
s22、遍历每副观测图像里所有星象,剔除信噪比低于阈值的星象;
[0036]
s23、遍历每副观测图像里所有星象,剔除星象距离小于阈值的星象对;
[0037]
s24、遍历每副观测图像里所有星象,剔除含有饱和像素的星象。
[0038]
优选地,步骤s22中剔除信噪比低于5的星象;步骤s23中剔除星象距离小于5倍星象半宽的星象对。
[0039]
优选地,步骤s3将包含候选星象的星图与参考星表进行匹配和证认,匹配证认全视场内参考星,并对匹配证认结果进行核查的具体方法为;
[0040]
s31、选取高精度参考星表,根据星图的指向提取对应天区的星表作为导航星库;
[0041]
s32、选取导航星库中的若干组亮星,组成若干对三角形;
[0042]
s33、选取星图中的若干组亮星,同样组成若干组三角形,依据“全等三角形”原则将星图中的亮星与导航星库中的亮星进行匹配证认,进而匹配证认全视场参考星;
[0043]
s34、剔除匹配结果中的变星以及双星,保证参考星匹配证认的完备性和准确性。
[0044]
优选地,步骤s31中高精度参考星表选取gaia dr2星表。
[0045]
优选地,步骤s4中将参考星由星表位置转换到观测位置的方法为;
[0046]
s41、对参考星的自行、岁差和章动进行修正,将其星表历元平位置转换到观测历元真位置;
[0047]
s42、对参考星的周年视差和周年光行差进行修正,将其观测历元真位置转换到观测历元的视位置;
[0048]
s43、对参考星的周日视差和周日光行差进行修正,将其观测历元的视位置转到观测历元站心位置;
[0049]
s44、对参考星的大气折射效应进行修正,将其观测历元站心位置转换到观测历元观测位置。
[0050]
优选地,步骤s61中畸变程度适中时,每100个像素设置为一个畸变模型网格点,4k
×
4k的探测器具有40个网格点。
[0051]
优选地,步骤s75中像场畸变模型在各网格点的分量变化差异小于0.001像素时,认为像场畸变模型收敛。
[0052]
有益效果:本发明基于测量密集星场对天文望远镜像场畸变进行标定,获得的像
场畸变模型能够直接应用到实际观测,有效解决天文望远镜实测工况下的像场畸变模型求解问题;同时本发明基于高精度参考星表和望远镜底片模型求解,可进一步弥补星象位置测量的随机误差,提高像场畸变模型的解算精度。
附图说明
[0053]
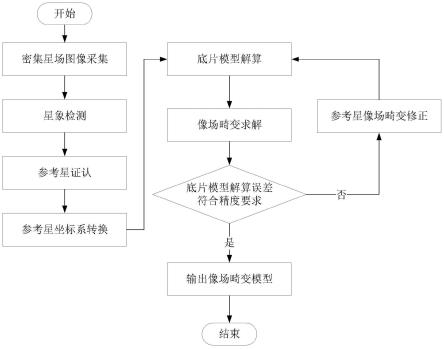
图1为发明所述一种基于测量密集星场的天文望远镜像场畸变标定方法的流程图;
[0054]
图2为实施例中利用本发明方法对实测星图的像场畸变求解结果图;
[0055]
图3为实施例中利用本发明方法对实测星图的像场畸变修正结果图。
具体实施方式
[0056]
下面通过附图对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
[0057]
实施例1:一种基于测量密集星场的天文望远镜像场畸变标定方法。本实施例中所使用的望远镜为口径14cm,焦距15cm;照相机为qhy-4040cmos相机,靶面边长3.6cm。
[0058]
本方法的流程如图1所示,具体包括:
[0059]
(1)根据银河系中心的坐标(j2000.0坐标为赤经17h45.6m,赤纬-29
°
00
′
),以及望远镜当地的地理经纬度与海拔预报银心位置序列;
[0060]
(2)在银河系中心靠近天顶处时,设置合理的曝光时间,使星象因周日视运动引起的拖长控制在星象半宽的范围内,连续采集多帧图像;
[0061]
(3)检测所有观测图像中的星象,并计算星象的重心,认为是星象的中心位置;
[0062]
(4)遍历每副观测图像里所有星象,剔除信噪比低于5的星象;
[0063]
(5)遍历每副观测图像里所有星象,剔除距离小于5倍半宽的星象对;
[0064]
(6)遍历每副观测图像里所有星象,剔除含有饱和像素的星象;
[0065]
(7)选取高精度参考星表,本实施例采用gaia dr2星表,根据星图的指向提取对应天区的星表作为导航星库;
[0066]
(8)选取导航星库中的若干组亮星,组成若干对三角形;
[0067]
(9)选取星图中的若干组亮星,组成若干组三角形,依据“全等三角形”原则将星图中的亮星与导航星库中的亮星进行匹配证认,进而匹配证认全视场参考星;
[0068]
(10)剔除匹配结果中的变星以及双星,保证参考星匹配证认的完备性和准确性;
[0069]
(11)参考星的自行、岁差和章动的修正,将其星表历元平位置转换到观测历元真位置;
[0070]
(12)参考星的周年视差和周年光行差修正,将其观测历元真位置转换到观测历元的视位置;
[0071]
(13)参考星的周日视差和周日光行差修正,将其观测历元的视位置转到观测历元站心位置;
[0072]
(14)参考星的大气折射效应修正,将其观测历元站心位置转换到观测历元观测位置;
[0073]
(15)构建望远镜观测的理想坐标系(ξ,η),在星图中以图像中心c为原点建立一个
直角坐标系,纵轴η为赤纬圈的投影,取赤纬增加的方向为正向;横轴ξ垂直于η轴,取赤经增加的方向为正向。c-ξη则称为理想坐标系。将参考星的赤道坐标(α,δ)转换到理想坐标,转换公式如下(其中(α0,δ0)为观测图像中心对应的赤道坐标):
[0074][0075]
(16)基于多项式模型采用最小二乘法解算底片模型参数(a
ij
,b
ij
),多项式关系如下(其中(x,y)为参考星在观测图像中的量度坐标):
[0076][0077]
(17)将底片模型参数作用于参考星的理想坐标,计算参考星的理论量度坐标,将参考星的实测量度坐标减去理论量度坐标,即可得到参考星的位置残差,观测图像中所有参考星的位置残差构成该观测图像的底片模型残差;
[0078]
(18)根据探测器像素数量及像场畸变程度划分网格,本实施例中每100个像素间隔设置为一个畸变模型网格点,4k
×
4k的探测器设备40个网格点。如望远镜视场较小,像场畸变较为平缓,则可每200个像素间隔设置一个畸变模型网格点;
[0079]
(19)将网格点范围内所有参考星的底片模型解算残差求平均,消除随机误差的影响,得到该网格点对应的像场畸变分量;
[0080]
(20)基于步骤(19)所求得的像场畸变初值,利用双线性插值方法求得每个星象的畸变量并做修正,假设待修正的星象的量度坐标为(x0,yo),搜索距离该星象最近的4个像场畸变的网格点,其量度坐标为:(fd_xi,fd_yj),(fd_x
i+1
,fd_yj),(fd_xi,fd_y
j+1
),(fd_x
i+1
,fd_y
j+1
),对应的像场畸变量为:(fd_dx
i,j
,fd_dy
i,j
),(fd_dx
i+1,j
,fd_dy
i+1,j
),(fd_dx
i,j+1
,fd_dy
i,j+1
),(fd_dx
i+1,j+1
,fd_dy
i+1,j+1
);
[0081]
(21)首先在x方向进行线性插值,求得(x0,fd_yj)和(x0,fd_y
j+1
)处畸变量(fd_dx
0,j
,fd_dy
0,j
),(fd_dx
0,j+1
,fd_dy
0,j+1
),插值方法如下:
[0082][0083][0084]
(22)在y方向进行线性插值,以(fd_dx
0,j
,fd_dy
0,j
)和(fd_dx
0,j+1
,fd_dy
0,j+1
)为插值端点,求得(x0,yo)处的畸变量(dx,dy),插值方法如下:
[0085][0086]
(23)修正所有参考星星象量度坐标为(x0+dx,yo+dy);
[0087]
(24)利用参考星星象的修正坐标迭代执行步骤(15)-步骤(23),直至像场畸变模型在各网格点的分量变化差异小于0.001像素,则认为像场畸变模型收敛,并最终输出保存。
[0088]
图2为基于本发明的方法对实测星图的像场畸变求解结果,横纵坐标对应星图的量度坐标,左上角的标尺为1个像素,可以看出星图具有明显的向心性系统性畸变。
[0089]
图3为基于本发明的方法对实测星图的像场畸变修正结果,横纵坐标对应星图的量度坐标,左上角的标尺为0.1个像素,可以看出星图中无明显系统性畸变,残余的畸变量较为随机且量级较小,达到了较好的像场畸变修正效果。
[0090]
如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1