不规则空间体的体积确定方法、装置及设备和存储介质与流程
本技术涉及网络,更具体地说,涉及一种不规则空间体的体积确定方法、装置及一种电子设备和一种计算机可读存储介质。
背景技术:
1、在网络技术领域,有时会构建不规则空间体,并确定不规则空间体的体积。例如:通过超声设备重构出肝脏等超声检测对象所对应的不规则空间体时,需要确定其体积,以给医生提供数据指导。
2、在相关技术中,通过切面遍历的方法确定其体积,也即遍历不规则空间体的每个不规则切面的面积,累加得到不规则空间体的体积。由于各个切面的形状不规则,计算各个切面的面积的过程各不相同且较为复杂,因此上述方案确定不规则空间体的体积的效率较低。
3、因此,如何提高不规则空间体的体积确定效率是本领域技术人员需要解决的技术问题。
技术实现思路
1、本技术的目的在于提供一种不规则空间体的体积确定方法、装置及一种电子设备和一种计算机可读存储介质,提高了不规则空间体的体积确定效率。
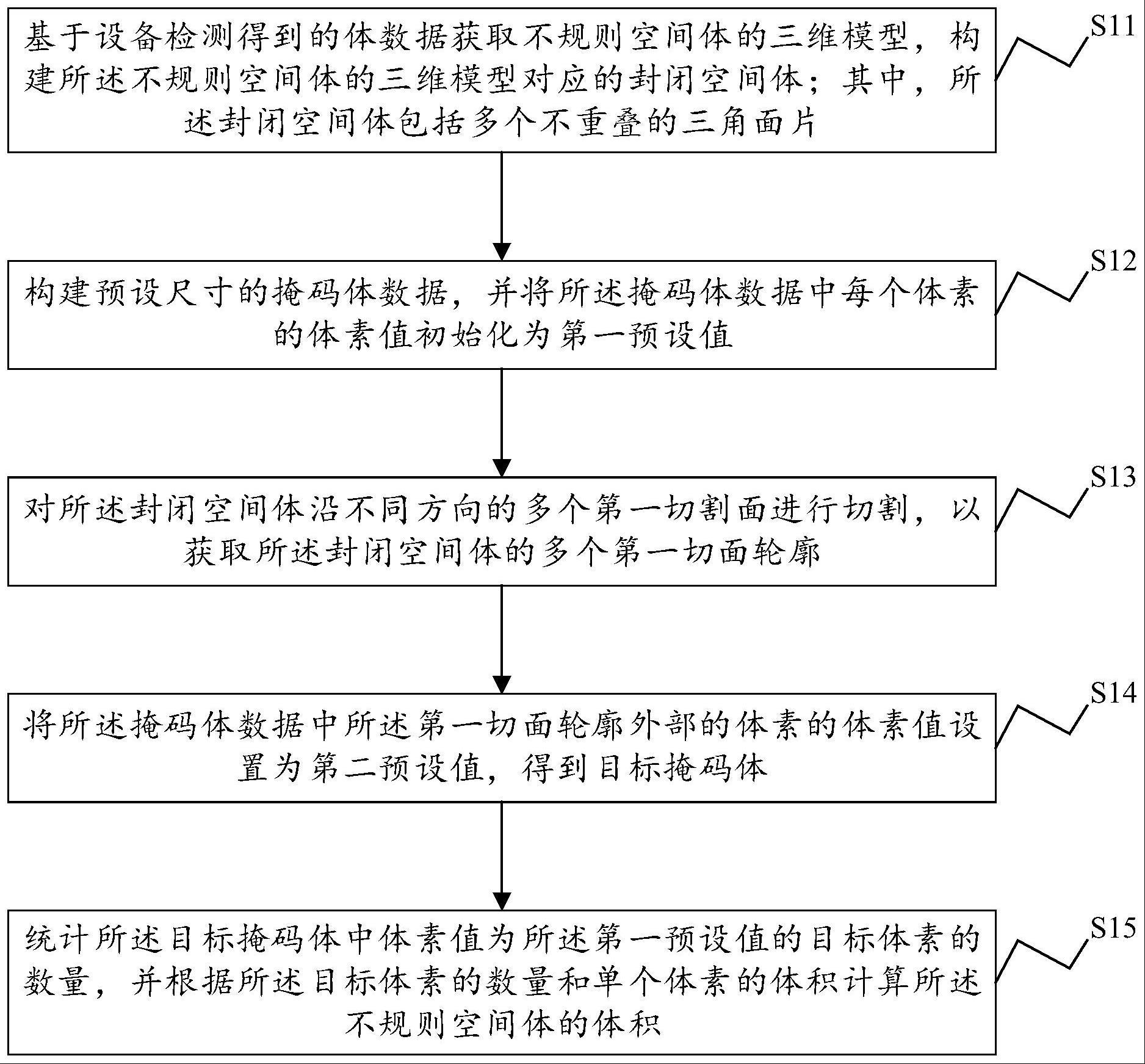
2、为实现上述目的,本技术提供了一种不规则空间体的体积确定方法,包括:基于设备检测得到的体数据获取不规则空间体的三维模型,构建所述不规则空间体的三维模型对应的封闭空间体;其中,所述封闭空间体包括多个不重叠的三角面片;构建预设尺寸的掩码体数据,并将所述掩码体数据中每个体素的体素值初始化为第一预设值;对所述封闭空间体沿不同方向的多个第一切割面进行切割,以获取所述封闭空间体的多个第一切面轮廓;将所述掩码体数据中所述第一切面轮廓外部的体素的体素值设置为第二预设值,得到目标掩码体;统计所述目标掩码体中体素值为所述第一预设值的目标体素的数量,并根据所述目标体素的数量和单个体素的体积计算所述不规则空间体的体积。
3、其中,所述构建所述不规则空间体的三维模型对应的封闭空间体,包括:对所述不规则空间体的三维模型沿多个第二切割面进行切割,以获取所述不规则空间体的多个第二切面轮廓,并在每个所述第二切面轮廓中选取多个轮廓点;其中,所述多个第二切割面相交于通过所述不规则空间体的目标直线;按照预设规则为每个所述第二切面轮廓中的轮廓点分配索引,对相邻第二切面轮廓中索引值相同的轮廓点进行插值得到插值轮廓点,并基于所述插值轮廓点构建所述相邻第二切面轮廓之间的第二切面轮廓;对相同第二切面轮廓中的不同轮廓点、不同第二切面轮廓中的轮廓点进行连接,形成多个不重叠的三角面片,并基于所述三角面片围合形成封闭空间体。
4、其中,所述对相邻第二切面轮廓中索引值相同的轮廓点进行插值得到插值轮廓点,包括:基于所述不规则空间体的三维模型确定相邻第二切面轮廓中索引值相同的轮廓点之间的目标点;根据相邻第二切面轮廓中索引值相同的轮廓点的坐标和所述目标点的坐标计算控制点的坐标;利用相邻第二切面轮廓中索引值相同的轮廓点的坐标和所述控制点的坐标进行贝塞尔插值,得到多个第一候选插值轮廓点;对相邻第一候选插值轮廓点按照体素距离进行插值得到多个第二候选插值轮廓点;将所述第一候选插值轮廓点和所述第二候选插值轮廓点按照位置顺序存储至目标数组,在所述目标数组中等间隔选取多个插值轮廓点。
5、其中,所述基于所述不规则空间体的三维模型确定相邻第二切面轮廓中索引值相同的轮廓点之间的目标点,包括:确定相邻第二切面轮廓对应的两个第二切割面分别沿所述目标直线的第一旋转角度和第二旋转角度,确定相邻第二切面轮廓中索引值相同的两个轮廓点分别与所述目标直线之间的第一距离和第二距离;在所述第一旋转角度和所述第二旋转角度之间选择目标旋转角度,并利用所述第一距离、所述第二距离、所述第一旋转角度、第二旋转角度和所述目标旋转角度计算目标点与所述目标直线之间的第一目标距离;基于相邻第二切面轮廓中索引值相同的两个轮廓点的坐标、所述第一目标距离和所述目标旋转角度计算所述目标点的坐标。
6、其中,所述基于所述不规则空间体的三维模型确定相邻第二切面轮廓中索引值相同的轮廓点之间的目标点,包括:确定相邻第二切面轮廓对应的两个第二切割面分别沿所述目标直线的旋转角度差值,确定相邻第二切面轮廓中索引值相同的两个轮廓点分别与所述目标直线之间的第一距离和第二距离;根据所述第一距离和所述第二距离计算目标点与所述目标直线之间的第一目标距离,并根据所述第一目标距离和所述旋转角度差值计算所述目标点与连线的中点之间的第二目标距离;其中,所述连线为相邻第二切面轮廓中索引值相同的两个轮廓点之间的连线;基于相邻第二切面轮廓中索引值相同的两个轮廓点的坐标和所述第二目标距离计算所述目标点的坐标。
7、其中,所述基于所述不规则空间体的三维模型确定相邻第二切面轮廓中索引值相同的轮廓点之间的目标点,包括:确定相邻第二切面轮廓对应的两个第二切割面分别沿所述目标直线的第一旋转角度和第二旋转角度,确定相邻第二切面轮廓中索引值相同的两个轮廓点分别与所述目标直线之间的第一距离和第二距离;根据所述第一旋转角度和所述第二旋转角度计算目标点所在的第二切面轮廓对应的第二切割面沿所述目标直线的目标旋转角度,根据所述第一距离和所述第二距离计算所述目标点与所述目标直线之间的第一目标距离;基于相邻第二切面轮廓中索引值相同的两个轮廓点的坐标、所述第一目标距离和所述目标旋转角度计算所述目标点的坐标。
8、其中,所述基于所述不规则空间体的三维模型确定相邻第二切面轮廓中索引值相同的轮廓点之间的目标点,包括:确定相邻第二切面轮廓中索引值相同的两个轮廓点分别与所述目标直线之间的第一距离和第二距离,并根据所述第一距离和所述第二距离计算目标点与所述目标直线之间的第一目标距离;基于相邻第二切面轮廓中索引值相同的两个轮廓点的坐标和所述第一目标距离计算目标点与连线的第三目标距离;其中,所述连线为相邻第二切面轮廓中索引值相同的两个轮廓点之间的连线;基于相邻第二切面轮廓中索引值相同的两个轮廓点的坐标和所述第三目标距离计算所述目标点的坐标。
9、其中,所述对相同第二切面轮廓中的不同轮廓点、不同第二切面轮廓中的轮廓点进行连接,形成多个不重叠的三角面片,包括:确定所述第二切面轮廓与所述目标直线的第一交点和第二交点;以所述第一交点为起点按照顺时针方向或逆时针方向为每个所述第二切面轮廓中的每个轮廓点分配索引;基于不同第二切面轮廓中索引相同的轮廓点构建每个第二切面轮廓的索引对应的轮廓点层,并以所述第一交点为起点、所述第二交点为终点为每个所述第二轮廓点层分配索引;对相同第二切面轮廓中的相邻轮廓点进行连接,对相同轮廓点层中属于相邻第二切面轮廓的轮廓点进行连接,对第k个第二切面轮廓中属于索引为n的轮廓点层的轮廓点和第k+1个第二切面轮廓中属于索引为n+1的轮廓点层的轮廓点进行连接。
10、其中,对所述封闭空间体沿不同方向的多个第一切割面进行切割,以获取所述封闭空间体的多个第一切面轮廓,包括:确定所述三角面片在不同方向上的最大深度和最小深度;依次将不同方向的不同第一切割面确定为目标第一切割面,对所述封闭空间体沿所述目标第一切割面进行切割,以获取所述目标第一切割面对应的目标第一切面轮廓;其中,在对所述封闭空间体沿目标方向的目标第一切割面进行切割时,确定所述目标第一切割面在所述目标方向上的切面深度,将所述目标方向上最大深度大于所述切面深度、最小深度小于所述切面深度的三角面片确定为待切割三角面片,确定所述目标第一切割面与所述待切割三角面片的边的交点,并基于所述交点构建所述目标第一切割面对应的目标第一切面轮廓。
11、其中,所述确定所述目标第一切割面与所述待切割三角面片的边的交点,包括:确定所述目标第一切割面与所述待切割三角面片的相交边,并确定所述相交边的顶点坐标;利用所述顶点坐标和所述目标第一切割面在所述目标方向上的切面深度计算交点坐标。
12、为实现上述目的,本技术提供了一种不规则空间体的体积确定装置,包括:获取模块,用于基于设备检测得到的体数据获取不规则空间体的三维模型,构建所述不规则空间体的三维模型对应的封闭空间体;其中,所述封闭空间体包括多个不重叠的三角面片;构建模块,用于构建预设尺寸的掩码体数据,并将所述掩码体数据中每个体素的体素值初始化为第一预设值;切割模块,用于对所述封闭空间体沿不同方向的多个第一切割面进行切割,以获取所述封闭空间体的多个第一切面轮廓;设置模块,用于将所述掩码体数据中所述第一切面轮廓外部的体素的体素值设置为第二预设值,得到目标掩码体;计算模块,用于统计所述目标掩码体中体素值为所述第一预设值的目标体素的数量,并根据所述目标体素的数量和单个体素的体积计算所述不规则空间体的体积。
13、为实现上述目的,本技术提供了一种电子设备,包括:存储器,用于存储计算机程序;处理器,用于执行所述计算机程序时实现如上述不规则空间体的体积确定方法的步骤。
14、为实现上述目的,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述不规则空间体的体积确定方法的步骤。
15、通过以上方案可知,本技术提供的一种不规则空间体的体积确定方法,构建与不规则空间体形态相近的目标掩码体,通过统计目标掩码体中体素值为第一预设值的目标体素的数量计算不规则空间体的体积,与切面遍历的方法相比,不需要计算每个切面的面积,提高了不规则空间体的体积确定效率。本技术还公开了一种不规则空间体的体积确定装置及一种电子设备和一种计算机可读存储介质,同样能实现上述技术效果。
16、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!