智能机器人屏幕形象的显示方法、装置、设备和介质与流程
本技术涉及计算机,尤其涉及一种智能机器人屏幕形象的显示方法、装置、设备和介质。
背景技术:
1、在实际应用中,同一空间内可能会设置有多个屏幕,当空间内某个用户唤醒智能机器人时,智能机器人的屏幕形象可能会在多个屏幕上显示。比如,随着汽车技术的发展进步,汽车中屏幕应用越来越多,为了满足需求车辆内可以设置多个屏幕,对于配置智能机器人的车辆,当某乘客唤醒智能机器人时,智能机器人的屏幕形象可能会在多个屏幕上同时显示,而该乘客可能仅需要与一个屏幕进行互动,智能机器人的屏幕形象出现在其余屏幕的前端时,会影响其他屏幕的乘客使用屏幕。
技术实现思路
1、本技术提出一种智能机器人屏幕形象的显示方法、装置、设备和介质。具体方案如下:
2、本技术一方面实施例提出了一种智能机器人屏幕形象的显示方法,包括:
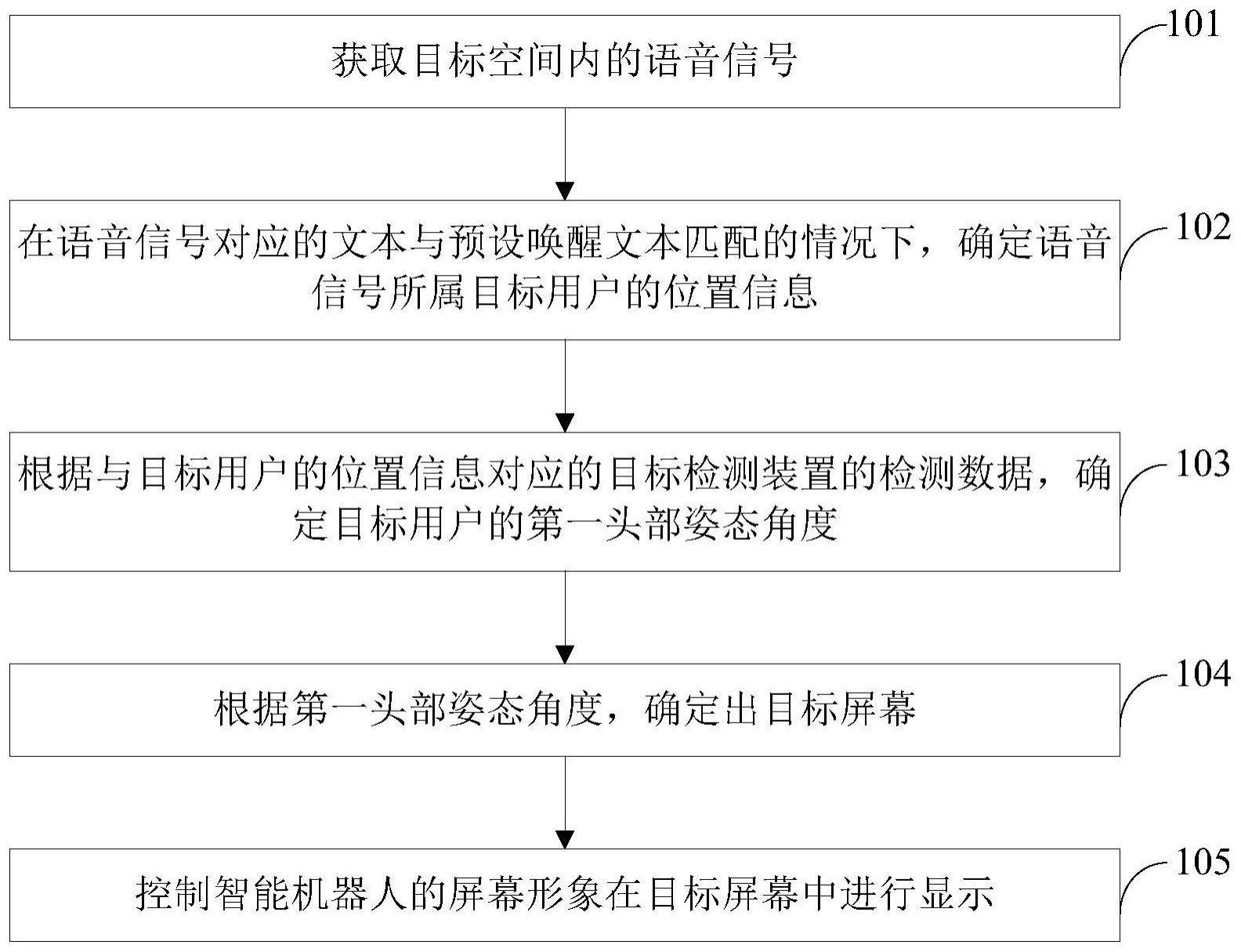
3、获取目标空间内的语音信号;
4、在语音信号对应的文本与预设唤醒文本匹配的情况下,确定语音信号所属目标用户的位置信息;
5、根据与目标用户的位置信息对应的目标检测装置的检测数据,确定目标用户的第一头部姿态角度;
6、根据第一头部姿态角度,确定出目标屏幕;
7、控制智能机器人的屏幕形象在目标屏幕中进行显示。
8、在本技术一方面实施例一种可能的实现方式中,目标检测装置为目标电磁波雷达,检测数据包括目标电磁波雷达发射的电磁波的第一功率及反射回的电磁波的第二功率;根据与目标用户的位置信息对应的目标检测装置的检测数据,确定目标用户的第一头部姿态角度,包括:
9、根据第二功率与第一功率之间的比值,确定目标用户头部当前的散射截面;
10、根据目标用户头部当前的散射截面,查询所述目标用户头部对应的角度与参考散射截面间的对应关系,确定所述目标用户头部当前的散射截面对应的角度,并将所述角度确定为所述第一头部姿态角度。
11、在本技术一方面实施例一种可能的实现方式中,根据第一头部姿态角度,确定出目标屏幕,包括:
12、将第一头部姿态角度与每个屏幕对应的第一预设角度进行匹配;其中,每个第一预设角度是指在目标用户的位置信息处观看每个屏幕时的头部姿态角度;
13、将匹配度最高的屏幕确定为所述目标屏幕。
14、在本技术一方面实施例一种可能的实现方式中,控制智能机器人的屏幕形象在目标屏幕中进行显示,包括:
15、根据目标空间内其他用户的位置信息对应的检测装置的检测数据,确定其他用户的第二头部姿态角度;
16、在第二头部姿态角度与目标屏幕对应的第二预设角度不匹配的情况下,在目标屏幕的第一显示区域显示预设尺寸的屏幕形象,其中,第二预设角度是指在其他用户的位置信息处观看目标屏幕时眼睛的注视角度;
17、在第二头部姿态角度与目标屏幕对应的第二预设角度匹配的情况下,在目标屏幕的第二显示区域显示目标尺寸的屏幕形象,其中,第二显示区域的关注度小于第一显示区域的关注度,目标尺寸小于预设尺寸。
18、在本技术一方面实施例一种可能的实现方式中,在根据与目标用户的位置信息对应的目标摄像装置采集的图像,确定目标用户头部的第一姿态角度之前,还包括:
19、根据目标空间内各检测装置的位置信息,确定与目标用户的位置信息对应的目标检测装置;
20、控制目标检测装置开启,以获取目标检测装置的检测数据。
21、在本技术一方面实施例一种可能的实现方式中,确定语音信号所属目标用户的位置信息,包括:
22、根据语音信号对应的目标语音采集装置,查询预设的目标空间内各语音采集装置与目标空间内座椅之间对应关系,以确定目标语音采集装置对应的目标座椅;
23、根据目标座椅,确定目标用户的位置信息。
24、本技术另一方面实施例提出了一种智能机器人屏幕形象的显示装置,包括:
25、获取模块,用于获取目标空间内的语音信号;
26、第一确定模块,用于在语音信号对应的文本与预设唤醒文本匹配的情况下,确定语音信号所属目标用户的位置信息;
27、第二确定模块,用于根据与目标用户的位置信息对应的目标检测装置的检测数据,确定目标用户的第一头部姿态角度;
28、第三确定模块,用于根据第一头部姿态角度,确定出目标屏幕;
29、控制模块,用于控制智能机器人的屏幕形象在目标屏幕中进行显示。
30、在本技术另一方面实施例一种可能的实现方式中,目标检测装置为电磁波雷达,检测数据包括目标电磁波雷达发射的电磁波的第一功率及反射回的电磁波的第二功率,第二确定模块,用于:
31、根据第二功率与第一功率之间的比值,确定目标用户头部当前的散射截面;
32、根据目标用户头部当前的散射截面,查询所述目标用户头部对应的角度与参考散射截面间的对应关系,确定所述目标用户头部当前的散射截面对应的角度,并将所述角度确定为所述第一头部姿态角度。
33、在本技术另一方面实施例一种可能的实现方式中,第三确定模块,用于:
34、将第一头部姿态角度与每个屏幕对应的第一预设角度进行匹配;其中,每个第一预设角度是指在目标用户的位置信息处观看每个屏幕时的头部姿态角度;
35、将匹配度最高的屏幕确定为所述目标屏幕。
36、在本技术另一方面实施例一种可能的实现方式中,控制模块,用于:
37、根据目标空间内其他用户的位置信息对应的检测装置的检测数据,确定其他用户的第二头部姿态角度;
38、在第二头部姿态角度与目标屏幕对应的第二预设角度不匹配的情况下,在目标屏幕的第一显示区域显示预设尺寸的屏幕形象;
39、在第二头部姿态角度与目标屏幕对应的第二预设角度匹配的情况下,在目标屏幕的第二显示区域显示目标尺寸的屏幕形象,其中,第二显示区域的关注度小于第一显示区域的关注度,目标尺寸小于预设尺寸。
40、在本技术另一方面实施例一种可能的实现方式中,该装置还包括:
41、第四确定模块,用于根据目标空间内各检测装置的位置信息,确定与目标用户的位置信息对应的目标检测装置;
42、控制模块,还用于控制目标检测装置开启,以获取目标检测装置的检测数据。
43、在本技术另一方面实施例一种可能的实现方式中,第一确定模块,用于:
44、根据语音信号对应的目标语音采集装置,查询预设的目标空间内各语音采集装置与目标空间内座椅之间对应关系,以确定目标语音采集装置对应的目标座椅;
45、根据目标座椅,确定目标用户的位置信息。
46、本技术另一方面实施例提出了一种计算机设备,包括处理器和存储器;
47、其中,所述处理器通过读取所述存储器中存储的可执行程序代码来运行与所述可执行程序代码对应的程序,以用于实现如上述一方面实施例所述的方法。
48、本技术另一方面实施例提出了一种车辆,该车辆中包括上述计算机设备。
49、本技术另一方面实施例提出了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如上述一方面实施例所述的方法。
50、本技术另一方面实施例提出了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时上述一方面实施例所述方法的步骤。
51、本技术实施例的智能机器人屏幕形象的显示方法、装置、计算机设备和存储介质,通过获取目标空间内的语音信号;在语音信号对应的文本与预设唤醒文本匹配的情况下,确定语音信号所属目标用户的位置信息;根据与目标用户的位置信息对应的目标检测装置的检测数据,确定目标用户的第一头部姿态角度;根据第一头部姿态角度,确定出目标屏幕;控制智能机器人的屏幕形象在目标屏幕中进行显示。由此,在确定用户唤醒智能机器人时,可以通过根据唤醒智能机器人的用户的头部姿态角度,确定出目标屏幕,以在目标屏幕上显示智能机器人的屏幕形象,从而可以避免在多个屏幕中同时显示智能机器人的屏幕形象,减少了对其他屏幕的用户使用屏幕的影响。
52、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
-
 0135753... 来自[中国] 2023年12月18日 20:32打卡,以利学习,牛,好厉害的发明,多谢分享,多谢原创人员。
0135753... 来自[中国] 2023年12月18日 20:32打卡,以利学习,牛,好厉害的发明,多谢分享,多谢原创人员。