一种主动脉瓣瓣叶长度的自动计算方法
1.本发明属于医学图像处理技术领域,具体涉及一种主动脉瓣瓣叶长度的自动计算方法。
背景技术:
2.经导管主动脉瓣置换术(transcatheter aortic valve replacement,tavr)是一种微创瓣膜置换手术,是通过介入导管技术,将人工心脏瓣膜输送至主动脉瓣位置,从而完成人工瓣膜植入,恢复瓣膜功能。
3.自2002年全球第一例经导管主动脉瓣置换术进行以来,tavr迅速发展,目前全球已完成了超过40万例,其适用范围也从高危患者群体拓展到了中危甚至低危患者群体。但tavr存在许多并发症,如瓣周漏、血管并发症、脑血管事件、需要植入永久起搏器治疗的传导阻滞、血栓形成等,其中冠状动脉阻塞是一种罕见(发生率《1%)但威胁生命的并发症,其指tavr手术期间或之后,血管造影或超声心动图等显示由瓣叶、钙化团块或夹层造成新的、部分或完全的冠状动脉口阻塞。
4.冠状动脉阻塞发生率不高,但却是一种非常致命的tavr术中及术后并发症。一旦发生,死亡率及术后心血管不良事件发生率非常之高。对于冠脉阻塞风险的预测,需要在术前进行全面精准的基于术前主动脉根部ct影像的测量评估,评估的相关因素包括冠脉开口高度、法式窦的大小、钙化情况、瓣叶的长度及形态以及植入的瓣膜种类、型号等。其中瓣叶长度是个很重要的评估因素,瓣叶长度过长将增加冠状动脉阻塞的风险。因此测量出瓣叶长度有着重大的意义。
5.目前在通常情况下,瓣叶长度测量需要由医生使用3d医学图像软件通过复杂的手动交互来测量。这既要求医生有较高的软件操作经验,也需要花费时间。同时由于瓣叶是一个3维空间结构,手动测量必然存在误差难以保证其精确程度。因此,需要一种能够自动计算出主动脉瓣瓣叶长度的方法,供医生参考,这不仅大大减少医生术前评估的时间,还能保证瓣叶长度测量的准确度,提升冠状动脉阻塞预防的成功率。
技术实现要素:
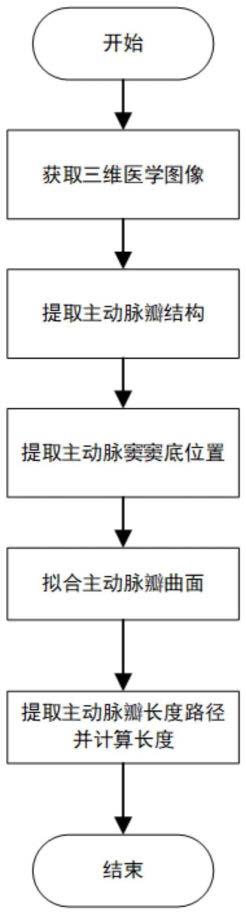
6.本发明的目的是针对现有技术存在的不足,提出一种主动脉瓣瓣叶长度的自动计算方法,包括:
7.步骤1:获取主动脉瓣的三维医学图像数据;
8.步骤2:分割提取主动脉瓣的瓣叶结构;
9.步骤3:提取主动脉根部的三个窦底的坐标,分别为p1
(x,y,z)
、p2
(x,y,z)
和p3
(x,y,z)
,基于所述三个窦底形成瓣环平面;
10.步骤4:对步骤2中的主动脉瓣瓣叶结构进行曲面拟合;
11.步骤5:提取主动脉瓣的瓣叶长度路径;
12.步骤6:计算瓣叶长度。
13.进一步地,所述三维医学图像数据可为包含人体主动脉瓣信息的任意医学图像数据。
14.进一步地,关于所述步骤2中分割提取主动脉瓣的瓣叶结构,由于主动脉瓣存在多片瓣叶,因此需要分割出不同片的瓣叶结构,所述分割提取是通过机器学习算法或者传统图像分割算法实现的。
15.进一步地,所述步骤3中提取主动脉根部的三个窦底的坐标是通过自动提取算法获取,或者通过手动提取的。
16.进一步地,所述步骤4中对主动脉瓣的瓣叶结构进行曲面拟合的方法具体为:
17.a.从步骤3中得到的主动脉根部的三个窦底的坐标中找到当前瓣叶对应的窦底坐标sinus
(x,y,z)
;
18.b.获取步骤3中的主动脉根部的三个窦底的坐标的中点meansinus
(x,y,z)
:meansinus=(p1+p2+p3)/3;
19.c.遍历瓣叶结构,计算瓣叶结构的每个体素与瓣环平面的距离,得到最大距离为maxd;
20.d.参照步骤b中的中点meansinus
(x,y,z)
,获取垂直于瓣环平面往升主动脉方向距离点meansinus
(x,y,z)
若干倍maxd距离的另一个点meansinuspro
(x,y,z)
;
21.e.获取sinus
(x,y,z)
和meansinuspro
(x,y,z)
两个点连线的中点midpos
(x,y,z)
,取midpos
(x,y,z)
和meansinus
(x,y,z)
连线方向作为投影方向;
22.f.由于提取的瓣叶结构为具有一定厚度的空间结构,因此基于步骤e中的投影方向求得该瓣叶在空间中的平均坐标点集leafpointset
(x,y,z)
;
23.g.基于步骤f中的点集leafpointset
(x,y,z)
使用最小二乘法进行二次曲面拟合,得到瓣叶曲面。
24.进一步地,所述步骤5中的提取主动脉瓣瓣叶长度路径,具体方法为:
25.a.以对应的窦底坐标sinus
(x,y,z)
作为瓣叶长度路径的起点;
26.b.以meansinus
(x,y,z)
作为瓣叶长度路径终点的初始参考点;
27.c.在瓣环平面上,获取以sinus
(x,y,z)
为圆心,以sinus
(x,y,z)
和meansinus
(x,y,z)
的连线距离作为半径,以sinus
(x,y,z)
和meansinus
(x,y,z)
的连线为中线的扇形区域;
28.d.在步骤c中的扇形区域内,在所述扇形的圆弧上均匀采样得到一组点集,取其中一点p4,并取垂直于瓣环平面往升主动脉方向距离点p4若干倍maxd距离的另一个点p4pro;
29.e.由点sinus
(x,y,z)
、p4和p4pro形成一个平面,获取此平面与瓣叶曲面的交线,作为当前方向对应的路径;
30.f.遍历步骤d中所述点集中的所有点,并按照步骤e中所述方式,得到扇形区域内对应的所有路径,取路径空间距离最短处作为此瓣叶长度路径。
31.进一步地,所述步骤6中的计算瓣叶长度,是根据步骤5中获取的瓣叶长度路径计算其空间长度而得到瓣叶长度。
32.本发明的技术效果:
33.应用本发明的技术方案,可有效减少医生tavr术前评估冠状动脉阻塞风险所需的时间,能够保证瓣叶长度测量的准确度,提升冠状动脉阻塞预防的成功率。
附图说明
34.图1本发明的主动脉瓣瓣叶长度的自动计算方法流程示意图;
35.图2本发明的主动脉瓣瓣叶长度的自动计算方法中,步骤2中所述分割提取到的主动脉瓣瓣叶结构的示意图;
36.图3本发明的主动脉瓣瓣叶长度的自动计算方法中,步骤3中所述分割提取到的主动脉根部三个窦底位置的示意图;
37.图4本发明的主动脉瓣瓣叶长度的自动计算方法中,步骤5中所述提取到的主动脉瓣的瓣叶长度路径的示意图;
38.图5本发明的主动脉瓣瓣叶长度的自动计算方法中,各空间点位置关系及相关投影示意图;
39.图6本发明的主动脉瓣瓣叶长度的自动计算方法中,各空间点位置关系及相关投影的另一示意图。
具体实施方式
40.下面结合具体实施例,进一步阐述本发明。应理解,实施例仅用于说明本发明而不用于限制本发明的保护范围。此外,应理解,在阅读了本发明所公开的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本发明所限定的保护范围之内。
41.如图1所示,本发明的主动脉瓣瓣叶长度的自动计算方法包括以下步骤:
42.步骤1:获取主动脉瓣的三维医学图像数据。具体来说,上述三维医学图像数据应包含人体主动脉瓣信息,可为任意医学图像数据类型,例如ct、磁共振成像(mri)或超声影像(us)等模态。
43.步骤2:分割提取主动脉瓣瓣叶结构,由于主动脉瓣存在多片瓣叶,因此需要分割出不同片的瓣叶结构,如图2所示。具体来说可通过机器学习算法分割提取,也可通过传统图像分割算法进行分割提取,通过聚类算法对不同片瓣叶进行分离。
44.步骤3:提取主动脉根部的三个窦底的坐标,分别为p1
(x,y,z)
、p2
(x,y,z)
和p3
(x,y,z)
,基于三个窦底形成瓣环平面,如图3所示。具体来说,上述提取主动脉根部的三个窦底坐标,可通过自动提取算法获取,也可通过手动获取。自动提取算法可为机器学习方法,也可为传统图像处理方法;手动提取方法可通过三维图像浏览工具,利用多平面重建(mpr)功能,标记选取三个窦底坐标。
45.步骤4:对步骤2中的主动脉瓣瓣叶结构进行曲面拟合,具体来说,实现方法为:
46.a.如图5所示,从步骤3中得到的主动脉根部的窦底的坐标中找到当前瓣叶对应的窦底坐标sinus
(x,y,z)
;
47.b.获取步骤3中的主动脉根部的三个窦底坐标的中点meansinus
(x,y,z)
:meansinus=(p1+p2+p3)/3;
48.c.遍历瓣叶结构,计算瓣叶结构的每个体素与瓣环平面的距离,得到最大距离为maxd,此处为了节约算法时间,可对瓣叶结构进行采样处理,不必遍历每一个瓣叶结构体素,不影响算法效果;
49.d.参照步骤b中的中点meansinus
(x,y,z)
,获取垂直于瓣环平面往升主动脉方向距
离点meansinus
(x,y,z)
若干倍(如1.5倍、2倍、2.5倍等)maxd距离的另一个点meansinuspro
(x,y,z)
;
50.e.获取sinus
(x,y,z)
和meansinuspro
(x,y,z)
两个点连线的中点midpos
(x,y,z)
,取midpos
(x,y,z)
和meansinus
(x,y,z)
连线方向作为投影方向,如图5所示;
51.f.由于提取的瓣叶结构为具有一定厚度的空间结构,因此基于步骤e中投影方向求得该瓣叶在空间中的平均坐标点集leafpointset
(x,y,z)
;
52.g.基于步骤f中的点集leafpointset
(x,y,z)
使用最小二乘法进行二次曲面拟合,得到瓣叶曲面。
53.步骤5:提取主动脉瓣瓣叶长度路径。即确定一个路径的起点和终点,以两点连线的方向在瓣叶曲面上获取瓣叶长度路径。因为窦底位置通常为窦部区域的最低点,因此将窦底定为瓣叶长度路径的起点。
54.以下,参照图6对具体实现方法进行说明:
55.a.以对应的窦底坐标sinus
(x,y,z)
作为瓣叶长度路径的起点;
56.b.以meansinus
(x,y,z)
作为瓣叶长度路径终点初始参考点;
57.c.在瓣环平面上,获取以sinus
(x,y,z)
为圆心,以sinus
(x,y,z)
和meansinus
(x,y,z)
的连线距离作为半径,以sinus
(x,y,z)
和meansinus
(x,y,z)
的连线为中线的扇形区域,该扇形区域的夹角为10
°‑
60
°
,优选为15
°‑
30
°
;
58.d.在步骤c中的扇形区域内,在所述扇形的圆弧上均匀采样得到一组点集,取其中一点p4(该点为在圆弧上任意选取的点),并选取垂直于瓣环平面往升主动脉方向距离点p4若干倍maxd距离的另一个点p4pro;
59.e.由点sinus
(x,y,z)
、p4和p4pro形成一个平面,获取此平面与瓣叶曲面的交线,作为当前方向对应的路径;
60.遍历步骤d中所述点集中的所有点,并按照步骤e中所述方式,得到扇形区域内对应的所有路径,取路径空间距离最短处作为此瓣叶长度路径。步骤6:所述计算瓣叶长度,即根据步骤5中获得的瓣叶长度路径计算其空间长度而得到瓣叶长度。
61.以上对本发明的实施方式进行了说明。但是,本发明不限定于上述实施方式。凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1