航天器在轨环境下的高逼真度实时渲染的方法与流程
1.本发明涉及航天器渲染技术领域,具体是航天器在轨环境下的高逼真度实时渲染的方法。
背景技术:
2.航天器的工作环境较为特殊,当前对航天器的渲染多在于针对航天器的设计模型在设计软件中进行渲染,目的在于精美的出展示图片,以及将航天器模型在三维可视化系统中进行普通的光照渲染,目的在于展示航天器的轨道、位置、态势等宏观工作环境基本业务;而对于航天器在太空中的高逼真度渲染当前的研究尚属空白,该研究对于针对以航天器在轨图像识别为基础的人工智能基础领域包括未来智慧航天战争、针对以航天器在轨多角度数据为基础的三维重建领域、以及针对航天器材质的光学分析等都能提供理论基础。
技术实现要素:
3.本发明的目的在于提供航天器在轨环境下的高逼真度实时渲染的方法,旨在解决现有技术中的航天器在轨环境下的高逼真度实时渲染的方法航天器在太空中的高逼真度渲染当前的研究尚属空白的问题。
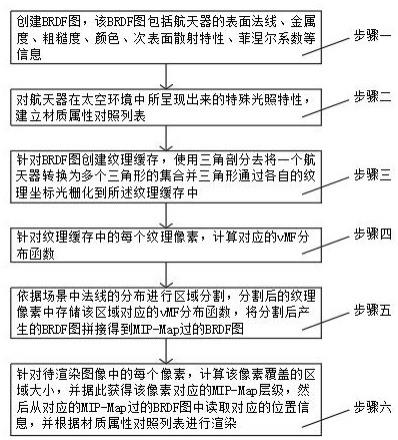
4.为实现上述目的,本发明采用如下技术方案:所述航天器在轨环境下的高逼真度实时渲染的方法,包括以下步骤:步骤一:创建brdf图,该brdf图包括航天器的表面法线、金属度、粗糙度、颜色、次表面散射特性、菲涅尔系数等信息;步骤二:对航天器在太空环境中所呈现出来的特殊光照特性,建立材质属性对照列表;步骤三:针对brdf图创建纹理缓存,使用三角剖分去将一个航天器转换为多个三角形的集合并三角形通过各自的纹理坐标光栅化到所述纹理缓存中;步骤四:针对纹理缓存中的每个纹理像素,计算对应的vmf分布函数;步骤五:依据场景中法线的分布进行区域分割,分割后的纹理像素中存储该区域对应的vmf分布函数,将分割后产生的brdf图拼接得到mip-map过的brdf图;步骤六:针对待渲染图像中的每个像素,计算该像素覆盖的区域大小,并据此获得该像素对应的mip-map层级,然后从对应的mip-map过的brdf图中读取对应的位置信息,并根据材质属性对照列表进行渲染。
5.为了使得本发明具有便于对照渲染的作用,本发明的进一步的技术方案为,步骤二中的材质属性对照列表为航天器各部件在真空光学领域中的材质属性对照列表。
6.为了使得本发明具有提升渲染性能的作用,本发明的进一步的技术方案为,步骤三中在使用三角剖分过程中,进行投影三角形时,计算其2d边界框,这样只需要遍历边界框内的像素,以提升其渲染时的性能。
7.本发明的有益效果是:通过对航天器在轨环境下进行高逼真度实时渲染,能够便于建立高逼真的航天器在轨运行环境,为进一步做基于该领域的人工智能系统训练提供数据和环境基础,并对以航天器在轨多角度数据为基础的三维重建领域、以及针对航天器材质的光学分析等提供理
论基础。
附图说明
8.图1是本发明实施例航天器在轨环境下的高逼真度实时渲染的方法流程示意图。
具体实施方式
9.下面结合附图对本发明的具体实施方式作进一步的说明。
10.如图1所示,航天器在轨环境下的高逼真度实时渲染的方法,包括以下步骤:步骤一:创建brdf图,该brdf图包括航天器的表面法线、金属度、粗糙度、颜色、次表面散射特性、菲涅尔系数等信息;步骤二:对航天器在太空环境中所呈现出来的特殊光照特性,建立材质属性对照列表;步骤三:针对brdf图创建纹理缓存,使用三角剖分去将一个航天器转换为多个三角形的集合并三角形通过各自的纹理坐标光栅化到所述纹理缓存中;步骤四:针对纹理缓存中的每个纹理像素,计算对应的vmf分布函数;步骤五:依据场景中法线的分布进行区域分割,分割后的纹理像素中存储该区域对应的vmf分布函数,将分割后产生的brdf图拼接得到mip-map过的brdf图;步骤六:针对待渲染图像中的每个像素,计算该像素覆盖的区域大小,并据此获得该像素对应的mip-map层级,然后从对应的mip-map过的brdf图中读取对应的位置信息,并根据材质属性对照列表进行渲染。
11.在本具体实施例中,通过对航天器在轨环境下进行高逼真度实时渲染,能够便于建立高逼真的航天器在轨运行环境,为进一步做基于该领域的人工智能系统训练提供数据和环境基础,并对以航天器在轨多角度数据为基础的三维重建领域、以及针对航天器材质的光学分析等提供理论基础。
12.具体的,步骤二中的材质属性对照列表为航天器各部件在真空光学领域中的材质属性对照列表,能够方便使用者根据对照表进行渲染。
13.优选的,步骤三中在使用三角剖分过程中,进行投影三角形时,计算其2d边界框,这样只需要遍历边界框内的像素,以提升其渲染时的性能,能够提升渲染时的性能从而提高其工作效率。
14.需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
15.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
16.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员
可以理解的其他实施方式。
技术特征:
1.航天器在轨环境下的高逼真度实时渲染的方法,其特征是,包括以下步骤:步骤一:创建brdf图,该brdf图包括航天器的表面法线、金属度、粗糙度、颜色、次表面散射特性、菲涅尔系数等信息;步骤二:对航天器在太空环境中所呈现出来的特殊光照特性,建立材质属性对照列表;步骤三:针对brdf图创建纹理缓存,使用三角剖分去将一个航天器转换为多个三角形的集合并三角形通过各自的纹理坐标光栅化到所述纹理缓存中;步骤四:针对纹理缓存中的每个纹理像素,计算对应的vmf分布函数;步骤五:依据场景中法线的分布进行区域分割,分割后的纹理像素中存储该区域对应的vmf分布函数,将分割后产生的brdf图拼接得到mip-map过的brdf图;步骤六:针对待渲染图像中的每个像素,计算该像素覆盖的区域大小,并据此获得该像素对应的mip-map层级,然后从对应的mip-map过的brdf图中读取对应的位置信息,并根据材质属性对照列表进行渲染。2.根据权利要求1所述的航天器在轨环境下的高逼真度实时渲染的方法,其特征是,步骤二中的材质属性对照列表为航天器各部件在真空光学领域中的材质属性对照列表。3.根据权利要求1所述的航天器在轨环境下的高逼真度实时渲染的方法,其特征是,步骤三中在使用三角剖分过程中,进行投影三角形时,计算其2d边界框,这样只需要遍历边界框内的像素,以提升其渲染时的性能。
技术总结
本发明提供航天器在轨环境下的高逼真度实时渲染的方法,涉及航天器渲染技术领域,该航天器在轨环境下的高逼真度实时渲染的方法,包括以下步骤:步骤一:创建BRDF图,该BRDF图包括航天器的表面法线、金属度、粗糙度、颜色、次表面散射特性、菲涅尔系数等信息;步骤二:对航天器在太空环境中所呈现出来的特殊光照特性,建立材质属性对照列表;步骤三:针对BRDF图创建纹理缓存;通过对航天器在轨环境下进行高逼真度实时渲染,能够便于建立高逼真的航天器在轨运行环境,为进一步做基于该领域的人工智能系统训练提供数据和环境基础,并对以航天器在轨多角度数据为基础的三维重建领域、以及针对航天器材质的光学分析等提供理论基础。航天器材质的光学分析等提供理论基础。航天器材质的光学分析等提供理论基础。
技术研发人员:杨石兴
受保护的技术使用者:西安恒歌数码科技有限责任公司
技术研发日:2022.06.14
技术公布日:2022/8/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1