一种多普勒参数耦合线提取方法
1.本技术属于水声信号处理及水声定位技术领域,具体地,涉及一种多普勒参数耦合线提取方法。
背景技术:
2.利用水声目标辐射噪声信号中的存在多普勒频移的线谱可以实现对水声目标的运动速度,正横距离等参数进行估计(杨德森,吴一. 水下目标辐射噪声线谱分析[j].哈尔滨工程大学学报,1996,17(1):38-44)。1994年ferguson和quinn提出使用时频分析提取多普勒信号瞬时频率,然后使用最小二乘法将提取频率与模型进行拟合,从而实现目标运动参数估计(b. g. ferguson, b. g. quinn, application of the short-time fourier transform and the wigner-ville distribution to the acoustic localization of aircraft, journal of the acoustical society of america, 96 (1994), 821-827)。2004年邹红星等提出了dopplerlet变换,结合优化的全局参数搜索方法,可以估计出匀速运动目标的参数。2020年,高德洋等提出一种将doppler-warping变换应用于水声目标运动参数估计的方法(高德洋,高大治,迟静,王良,宋文华.doppler-warping变换及其应用在声学目标运动速度估计[j].物理学报,2021,70(12):253-260)。
[0003]
虽然上述文献已经公开了基于水声信号的多普勒频移效应估计水声目标的运动参数的不同方法,但是由于水中声速较快且水中目标运动速度较慢,水声信号的多普勒频移现象与空气中高速运动目标相比较弱,因此在利用单线谱的多普勒频移进行水声目标双运动参数(速度、最近距离)估计时,上述所有方法均会存在较强的参数耦合现象,导致上述水声目标运动参数的估计误差过大,无法精确地定位最近距离与速度值。
技术实现要素:
[0004]
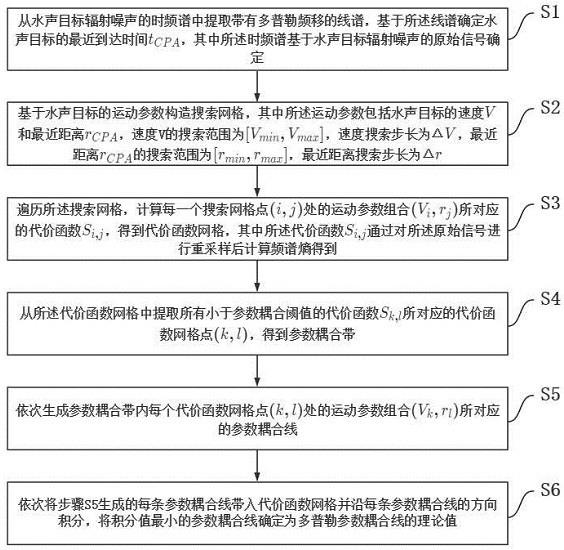
为解决上述现有技术中存在的问题,本技术的目的在于提供一种多普勒参数耦合线提取方法,用于获取水声目标的多普勒参数耦合线的理论值,具体地,包括以下步骤: s1:从水声目标辐射噪声的时频谱中提取带有多普勒频移的线谱,基于所述线谱确定水声目标的最近到达时间,其中所述时频谱基于水声目标辐射噪声的原始信号确定;s2:基于水声目标的运动参数构造搜索网格,其中所述运动参数包括水声目标的速度v和最近距离,速度v的搜索范围为
ꢀꢀ
,速度搜索步长为,最近距离的搜索范围为,最近距离搜索步长为;s3:遍历所述搜索网格,计算每一个搜索网格点处的运动参数组合所对应的代价函数,得到代价函数网格,其中所述代价函数通过对所述原始信号进行重采样后计算频谱熵得到;s4:从所述代价函数网格中提取所有小于参数耦合阈值的代价函数所对应的
代价函数网格点,得到参数耦合带;s5:依次生成参数耦合带内每个代价函数网格点处的运动参数组合所对应的参数耦合线;s6:依次将步骤s5生成的每条参数耦合线带入代价函数网格并沿每条参数耦合线的方向积分,将积分值最小的参数耦合线确定为多普勒参数耦合线的理论值。
[0005]
进一步地,步骤s3包括以下步骤:s31:提取任一搜索网格点,使用包含该搜索网格点处的运动参数组合的doppler-warping算子对水声目标辐射噪声的原始信号进行重采样得到重采样信号,其中,,c为水中声速;s32:计算与该点处的运动参数组合对应的代价函数,其中,为积分上下限,为所述的频谱,具体形式为;s33:重复执行步骤s31、s32,直到遍历所述搜索网格,得到代价函数网格。
[0006]
优选地,所述积分上下限根据所述线谱的多普勒频率展宽情况确定。
[0007]
优选地,所述参数耦合阈值基于代价函数的数值分布范围确定。
[0008]
进一步地,步骤s5包括以下步骤:s51:基于水声目标的运动参数构造参数耦合线理论值的计算网格,其中速度v的计算范围为 ,速度计算步长为 ,最近距离 的计算范围为,最近距离计算步长为 ;s52:提取处于所述参数耦合带内的任一代价函数网格点 处的运动参数组合;s53:对于所述 ,遍历所述计算网格,计算每一个计算网格点处的,得到与 对应的计算结果网格,其中, 为对所述线谱进行doppler-warping变换后的瞬时频率,在计算网格点 处的具体形式为
其中, 为所述线谱的中心频率, 为计算网格点处的运动参数组合;s54:从与 对应的计算结果网格中提取多个局部极小值点,基于所述多个局部极小值点生成与 对应的参数耦合线;s55:重复执行步骤s52至s54,直到遍历所述参数耦合带内的所有代价函数网格点。
[0009]
优选地,,其中 均为正整数。
[0010]
优选地,所述 的具体形式为:。
[0011]
本技术的实施例提供的一种多普勒参数耦合线提取方法至少具有以下有益效果:(1) 本技术的方法对直接通过代价函数局部极小值进行曲线拟合的技术方案进行了改进,通过划分参数耦合带有效地减少了用于估计最优的参数耦合线的备选运动参数组合的数量,进而对处于参数耦合带中的各个备选的运动参数组合生成较为光滑的参数耦合线,并从其中选择最优的参数耦合线作为多普勒参数耦合线的理论值,有效地改善了直接对代价函数局部极小值进行曲线拟合所存在的曲线波动、误差过大等问题,有效地提高了所提取的参数耦合线的精度。
[0012]
(2)本技术所提供的方法,对于搜索网格和计算网格采用不同的网格密度,适当降低搜索网格的网格密度,以在步骤s3、s4中尽快地确定参数耦合带,同时适当提高计算网格的密度,以保证步骤s5拟合出的参数耦合线的精度。通过上述不同网格密度的设置在加快确定参数耦合带的同时增加参数耦合线的拟合精度,实现了搜索速度与计算精度的平衡。
附图说明
[0013]
图1为水声目标运动模型的示意图;图2为一个具体的单频声源辐射噪声的原始信号的频谱;图3为一个具体的水声目标所产生的辐射噪声的lofar图;图4为一个具体的通过代价函数的多个局部极小值拟合参数耦合线的示意图;图5为根据本技术实施例的一种多普勒参数耦合线提取方法的流程图;图6为根据本技术实施例的从代价函数网格中划分参数耦合带的示意图;
图7为根据本技术实施例的步骤s5的具体实施流程;图8a至图8c为多组备选的运动参数组合通过步骤s53得到的计算结果网格的热力图;图9为根据图8a至图8c中每个计算结果网格的局部极小值点拟合生成的多条参数耦合线;图10为根据本技术实施例叠加显示于代价函数网格热力图上的多普勒参数耦合线;图11为根据本技术的一个具体实施例的信号频谱图;图12为根据本技术的一个具体实施例的在代价函数网格的热力图上叠加的多普勒参数耦合线的理论值;图13为根据本技术的一个具体实施例的多普勒参数耦合线的理论值及声源真实的运动参数所在位置;图14为根据本技术的另一个具体实施例的代价函数网格的热力图;图15为根据本技术的另一个具体实施例的多普勒参数耦合线的理论值及声源真实的运动参数所在位置。
具体实施方式
[0014]
以下,基于优选的实施方式并参照附图对本技术进行进一步说明。
[0015]
此外,为了方便理解,放大或者缩小了图纸上的各种构件,但这种做法不是为了限制本技术的保护范围。
[0016]
单数形式的词汇也包括复数含义,反之亦然。
[0017]
在本技术实施例中的描述中,需要说明的是,若出现术语“上”、“下”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是本技术实施例的产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,本技术的描述中,为了区分不同的单元,本说明书上用了第一、第二等词汇,但这些不会受到制造的顺序限制,也不能理解为指示或暗示相对重要性,其在本技术的详细说明与权利要求书上,其名称可能会不同。
[0018]
本说明书中词汇是为了说明本技术的实施例而使用的,但不是试图要限制本技术。还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,可以是直接相连,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的技术人员而言,可以具体理解上述术语在本技术中的具体含义。
[0019]
为更好地说明本技术的技术方案,首先对基于水声目标的辐射噪声进行运动参数估计的原理及存在的缺陷进行说明。
[0020]
图1为水声目标运动模型的示意图,如图1所示,水声目标为船舶或其拖曳的发射换能器等声源1,声源1在一定时间内以等速v进行直线运动,并产生在水声环境中传播的辐射噪声,声源1与布设于水中的水听器2的实时距离为 r,在声源1的行进过程中与水听器2的最近距离及对应的最近点时间分别为 与 。由于声源1相对于水听器2进行直线
运动,因此水听器2接收到的声源1所产生的辐射噪声的原始信号将出现多普勒频移效应,图2示出了一个具体的单频声源辐射噪声的原始信号的频谱,从图2可以看出其单频信号因多普勒频移具有明显的频带展宽现象。
[0021]
对水声目标所产生的辐射噪声的原始信号进行短时傅里叶变换处理,能够得到其时频谱,一般采用lofar(low frequency analysis recording)图进行表示。图3示出了一个具体的水声目标所产生的辐射噪声的lofar图,从图3中能够观察到多条抛物线状的线谱,这些线谱分别由水声目标包含的各种单频噪声源(如船舶上的螺旋桨、机械设备以及发射单频信号的拖曳声源等)产生,其类似抛物线的形态则代表了水声目标与水听器逐渐靠近到再次远离的过程中所出现的多普勒频移现象。具体地,上述包含多普勒频移的线谱满足式(1):其中, 为上述单频噪声源的原始频率(即线谱的中心频率), c为水中声速(在水声目标与水听器距离较近时近似为常数)。
[0022] 显然,通过上述lofar图能够直接确定最近点时间 ,在此基础上如果需要继续确定水声目标的速度v、最近距离 等运动参数的信息,可以通过对辐射噪声的原始信号进行doppler-warping变换,并构造的搜索网格,在搜索网格内求取代价函数的方式进行。
[0023]
由于水声目标运动所产生的多普勒频移远远小于空气中高速运动目标所产生的多普勒频移,因此运动参数之间存在明显的参数耦合现象,其表现即计算得到的代价函数存在多个局部极小值,上述多个局部极小值的位置将形成一条参数耦合线,水声目标的真实运动参数即处于该参数耦合线上。
[0024]
尽可能精确地获取上述水声目标的真实运动参数所处的参数耦合线对于水声目标的准确定位等具有重要意义。现有的确定参数耦合线的方法主要通过对遍历搜索网格得到的多个代价函数局部极小值位置进行曲线拟合实现,然而,在对实际的实验数据进行处理的过程中,如图4所示,由于水声环境以及水声目标辐射噪声信号的复杂性,上述代价函数局部极小值的位置往往存在波动、漂移等现象,使得拟合得到的参数耦合线与真实运动参数所处的参数耦合线存在较大的偏差,从而影响了后续水声目标定位的精度。针对上述现有技术中存在的问题,有必要提供一种多普勒参数耦合线提取方法,能够精确地提取真实运动参数所处的多普勒参数耦合线的理论值。
[0025]
为解决上述现有技术中存在的问题,本技术实施例提供一种多普勒参数耦合线提取方法(图5为本技术实施例提供的多普勒参数耦合线提取方法的流程图),包括以下步骤: s1:从水声目标辐射噪声的时频谱中提取带有多普勒频移的线谱,基于所述线谱确定水声目标的最近到达时间 ,其中所述时频谱基于水声目标辐射噪声的原始信号确定;s2:基于水声目标的运动参数构造搜索网格,其中所述运动参数包括水声目标的
速度v和最近距离,速度v的搜索范围为
ꢀꢀ
,速度搜索步长为,最近距离的搜索范围为,最近距离搜索步长为;s3:遍历所述搜索网格,计算每一个搜索网格点处的运动参数组合所对应的代价函数,得到代价函数网格,其中所述代价函数通过对所述原始信号进行重采样后计算频谱熵得到;s4:从所述代价函数网格中提取所有小于参数耦合阈值的代价函数所对应的代价函数网格点,得到参数耦合带;s5:依次生成参数耦合带内每个代价函数网格点处的运动参数组合所对应的参数耦合线;s6:依次将步骤s5生成的每条参数耦合线带入代价函数网格并沿每条参数耦合线的方向积分,将积分值最小的参数耦合线确定为多普勒参数耦合线的理论值。
[0026]
本技术实施例提供的一种多普勒参数耦合线提取方法,在对运动参数搜索网格进行遍历搜索后,并未直接通过遍历计算得到的代价函数的多个局部极小值进行拟合以得到参数耦合线,而是基于代价函数的遍历计算结果划分参数耦合带,以处于参数耦合带内的运动参数组合作为备选的运动参数组合,对每个备选的运动参数组合生成对应的参数耦合线,最后从多个备选的参数耦合线中根据其各自的代价函数积分结果确定多普勒参数耦合线的理论值。本技术所提供的方法,通过划分参数耦合带有效地减少了用于估计最优的参数耦合线的备选运动参数组合的数量,进而对处于参数耦合带中的各个备选的运动参数组合生成较为光滑的参数耦合线,并从其中选择最优的参数耦合线作为多普勒参数耦合线的理论值,有效地改善了直接对代价函数局部极小值进行曲线拟合所存在的曲线波动、误差过大等问题,有效地提高了所提取的参数耦合线的精度。
[0027]
以下结合附图及具体实施例对步骤s1至步骤s6进行详细说明。
[0028]
步骤s1用于从水声目标辐射噪声的时频谱中提取线谱,在一些具体的实施方式中,如图3所示,可以通过短时傅里叶变换计算水生目标辐射噪声的时频谱并生成lofar图,从图中选择线谱并基于线谱的形态确定水声目标的最近点时间。
[0029]
在确定水声目标的最近点时间并通过实测数据获取水中声速c后,为进一步对水声目标的速度v、最近距离 等运动参数进行估计,需要首先对上述辐射噪声的原始信号进行消除多普勒频移效应的处理,具体地,设水声目标的辐射噪声信号在时刻发射,在 t时刻被接收到,如图1所示,之间有如下几何关系:
ꢀꢀ
(2)根据式(2),设置含待估计的运动参数的doppler-warping算子,并使用 对辐射噪声的原始信号进行重采样,其中 的具体形式为:
ꢀ
(3)式(3)所示的doppler-warping算子 具有对参数敏感的特性,即:当使用真实的运动参数组合带入该算子并对原始信号进行重采样时,能够使重采样信号消除多普勒频移,恢复为单频信号,同时,由于水中目标的多普勒频移相对较小,运动参数组合存在明显的耦合现象,即还存在其他的运动参数组合,将其带入 进行重采样后的信号也符合单频性质,上述多组运动参数组合构成了一条参数耦合线,真实的运动参数组合就位于该参数耦合线上。
[0030]
精确地提取参数耦合线对于水声目标定位具有重要意义,基于上述含参重采样信号的单频特性,可以通过步骤s2设置运动参数的搜索网格,然后通过步骤s3遍历搜索网格,对每一个网格点处的运动参数组合计算其频谱熵作为代价函数,得到代价函数网格。
[0031]
具体地,在一些优选的实施例中,速度 v的搜索范围为,速度搜索步长为,最近距离 的搜索范围为 ,最近距离搜索步长为。根据上述搜索范围及搜索步长生成搜索网格,其中每一个搜索网格点处均对应一个待搜索的运动参数组合 。
[0032]
具体地,在一些优选的实施例中,步骤s3进一步包括以下步骤:s31:提取任一搜索网格点,使用包含该搜索网格点处的运动参数组合的doppler-warping算子对水声目标辐射噪声的原始信号进行重采样得到重采样信号,其中,,c为水中声速;s32:计算与该点处的运动参数组合对应的代价函数,其中,为积分上下限,为所述的频谱,具体形式为;s33:重复执行步骤s31、s32,直到遍历所述搜索网格,得到代价函数网格。
[0033]
在对重采样信号的频谱 进行积分时,积分上下限可以根据所述线谱的多普勒频率展宽情况确定。例如,可以通过图2示出频谱分析上述单频声源信号在中心频率 附近的频率展宽情况,也可以通过图3示出的lofar图分析上述线谱在中心频率 附
近的频率展宽情况,进而确定 。
[0034]
通过步骤s3遍历搜索网格并计算获取代价函数网格后,可以将上述代价函数网格以热力图(或等高线图)的形式进行表示(如图4所示出的),其中横坐标为v,纵坐标为 ,图中每个位置的值为该处的v、 组合所对应的代价函数值。
[0035]
图4所示出的热力图形式的代价函数网格具有多个局部极小值,其中真实的运动参数组合就存在于上述多个局部极小值中。将上述多个局部极小值进行曲线拟合,可以得到一条耦合参数线,通过曲线拟合得到的耦合参数线进一步联合其他参数估计算法,就能够对的具体位置进行定位。然而,如图4所示出的那样,由于水声环境以及水声目标辐射噪声信号的复杂性,上述代价函数局部极小值的位置往往存在波动、漂移等现象,使得拟合得到的参数耦合线与真实运动参数所处的参数耦合线存在较大的偏差,从而影响了后续水声目标定位的精度。
[0036]
为此,本技术的方法对上述直接对代价函数局部极小值进行曲线拟合的技术方案进行了改进,其具体实施思路为:首先通过步骤s4从代价函数网格中划分参数耦合带,处于参数耦合带中的运动参数组合对应的代价函数较小,因此可以将其作为备选的运动参数组合;进而通过步骤s5对于每组备选的运动参数组合生成对应的较为光滑的备选的参数耦合线;最后通过步骤s6计算代价函数沿每条备选的参数耦合线方向的积分值,从中选择最优的参数耦合线作为多普勒参数耦合线的理论值。
[0037]
具体地,步骤s4用于划分参数耦合带,从而确定备选的运动参数组合。图6示出了根据本技术实施例的从代价函数网格中划分参数耦合带的示意图,如图6所示,在本技术的一些实施例中,可以预先根据代价函数的数值分布情况确定参数耦合阈值,然后将代价函数网格中所有小于参数耦合阈值的代价函数所对应的代价函数网格点划分入参数耦合带(即图6中上、下虚线中的区域),位于上述参数耦合带中的代价函数网格点处的运动参数组合 即作为备选的运动参数组合,用于在接下来的步骤s5中生成对应的参数耦合线。
[0038]
进一步地,步骤s5通过以下步骤生成每一组运动参数组合对应的参数耦合线:s51:基于水声目标的运动参数构造参数耦合线理论值的计算网格,其中速度v的计算范围为 ,速度计算步长为 ,最近距离 的计算范围为,最近距离计算步长为 ;s52:提取处于所述参数耦合带内的任一代价函数网格点 处的运动参数组合;s53:对于所述 ,遍历所述计算网格,计算每一个计算网格点处的,得到与 对应的计算结果网格,其中, 为
对所述线谱进行doppler-warping变换后的瞬时频率,在计算网格点 处的具体形式为其中, 为所述线谱的中心频率, 为计算网格点处的运动参数组合;s54:从与 对应的计算结果网格中提取多个局部极小值点,基于所述多个局部极小值点生成与 对应的参数耦合线;s55:重复执行步骤s52至s54,直到遍历所述参数耦合带内的所有代价函数网格点。
[0039]
图7示出了根据本技术一个具体实施例的上述步骤s5的实施流程,如图7所示,步骤s5中首先构造一个参数耦合线理论值的计算网格,然后使用了两层嵌套遍历,其中内部遍历用于计算每一组备选的运动参数组合 在所有计算网格点处的 对时间的偏导数(在时刻)并生成计算结果网格;外部遍历用于对每一组备选的运动参数组合 ,基于其计算结果网格中的多个局部极小值点拟合得到对应的参数耦合线。
[0040]
其中 为对上述线谱进行doppler-warping变换后的瞬时频率,以下对 的具体形式进行详细推导并阐述使用其生成备选的运动参数组合 对应的参数耦合线的原理。
[0041]
设包含多普勒频移的原始线谱的瞬时频率为 ,水声目标的真实的最近到达时间为 ,对于真实的运动参数 ,将doppler-warping算子带入瞬时频率的表达式,得到:(4)上式(4)为原始线谱经过doppler-warping变换后的瞬时频率表达式,通过此式可以得到当 ,即:当使用正确的运动参数进行doppler-warping变换后,瞬时频率将重新恢复单频。
[0042]
此外,将原始信号的线谱对时间求导得到:(5)
从式(5)可以看出,在 处瞬时频率对应导数值最大,即:使用正确的运动参数进行doppler-warping变换得到的瞬时频率 处的导数为0,对应于在 时刻doppler-warping变换后的线谱频率变化率为0,即频率为一个常数。因此,将式(4)对时间求导并带入得到式(6): (6)根据以上分析,在运动参数的真实值处应有,因此对应参数耦合线处应有,参数耦合线方向为方向导数变化最小的方向,对应于式(6)中的多个局部极小值位置。
[0043]
以上对瞬时频率 的doppler-warping变换及其带入正确的运动参数并获取其对时间的导数在 处的取值的物理意义进行了详细的说明。在本技术的实施例中,具体地,对于每一组备选的运动参数组合,将其带入(4)式并代替真实的运动参数组合 ,从而得到:进一步地将 对时间求导,并计算其在时刻以及计算网格点 处的取值,即得到:图8a至图8c示出了多组备选的运动参数组合通过步骤s53得到的计算结果网格的热力图,从图8a至图8c中可以看到,对于任意一组备选的运动参数组合,其计算结果存在一条覆盖局部极小值点的较细的条带,且其中局部极小值点的分布明显较代价函数网格中的局部极小值点更平滑。图9示出了根据图8a至图8c中每个计算结果网格的局部极小值点拟合生成的多条参数耦合线。
[0044]
此外,为了加快确定参数耦合带的同时增加参数耦合线的拟合精度,在本技术的一些优选的实施例中, ,其中 均为正整数。本技术所提供的方法,由于改变了直接通过搜索网格生成的代价函数网格的局部极小值拟合参数耦合曲线的实施方式,因此搜索网格的网格密度可以适当降低,以在步骤s3、s4中尽快地确定参数耦合带,而计算网格的密度则可以适当提高,以保证步骤s5拟合出的参数耦合线
的精度。
[0045]
通过步骤s5获得与每个备选的运动参数组合 所对应的参数耦合线后,在s6中依次将步骤s5生成的每条参数耦合线带入代价函数网格并沿每条参数耦合线的方向积分,将积分值最小的参数耦合线确定为多普勒参数耦合线的理论值。图10示出了根据本技术实施例叠加显示于代价函数网格热力图上的多普勒参数耦合线(图中黑色实线),通过图10可以看出,使用本技术提供的方法所获取的多普勒参数耦合线理论值明显提高了曲线精度及平滑程度,从而保证了后续水声目标定位的精度。
[0046]
实施例1本实施例使用仿真数据,声速为1500m/s,仿真信号中心频率为400hz,声源运动速度为5m/s,最近通过距离为900m,信号时长为100s,图11为信号频谱图,可以看到在400hz处有明显的多普勒导致频谱展宽现象。首先获取声源的最近到达点时间 ,并对仿真得到的时域信号设置doppler-warping搜索网格 ,然后对仿真信号进行doppler-warping变换并遍历搜索网格获取代价函数网格(代价函数网格的热力图已示于图4),根据各个搜索网格点处的代价函数值分布情况设置参数耦合阈值为0.1,将小于0.1所对应的网格点划分入参数耦合带(图4中上下虚线之间的区域)。
[0047]
接下来通过步骤s5生成参数耦合带中所有运动参数组合对应的参数耦合线,其中参数耦合线理论值的计算网格为 将参数耦合带中,得到多条耦合曲线理论计算结果。
[0048]
最后将每条参数耦合线回带入代价函数网格,并沿参数耦合线方向积分,积分最小值对应的参数耦合线即为多普勒参数耦合线的理论值。图12示出了在代价函数网格的热力图上叠加的多普勒参数耦合线的理论值,可以看到该参数耦合线符合耦合带总体变化趋势。图13示出了多普勒参数耦合线的理论值及声源真实的运动参数所在位置(图中三角星处),从图13中可以看到本方法提取的多普勒参数耦合线的理论值经过真实的运动参数位置,从而证明了通过本技术的方法提取参数耦合线的准确性。
[0049]
实施例2本实施例使用海上实验的实测数据。实验采用拖曳声源发射50hz-400hz单频、调频信号,采用两个安装在海底的水平阵、一个垂直阵、一个倾斜阵接收信号。实验分为s5和s59两组。本实施例采用s5实验,并选择垂直阵中13号阵元进行分析处理。
[0050]
具体地,本实施例选取s5实验中浅水拖曳声源发射的385hz线谱,选取信号3400s-3700s,总时长300s,到达最近点时间为3540s,s5实验船速为5节(2.5m/s),垂直阵距声源运动轨迹最近点距离为903m。信号频谱图已示于图2,从频谱图可以看出单频信号因多普勒频移有明显的频带展宽。首先获取声源的最近到达点时间 ,设置doppler-warping搜索网格 ,并通过实测获取水体平均声速c=1490m/s。然后对该信号进行doppler-warping变换并遍历搜索网格获取代价函数网格(代价函数网格的热力图示于图14),根据各个搜索网格点处的代价函数值分布情况设置参数耦合阈值为0.1,将小于0.1所对应的网格点划分入参数耦合带(图14中上下虚线之间的区域)。
[0051]
接下来通过步骤s5生成参数耦合带中所有运动参数组合对应的参数耦合
线,其中参数耦合线理论值的计算网格为将参数耦合带中,得到多条耦合曲线理论计算结果。
[0052]
最后将每条参数耦合线回带入代价函数网格,并沿参数耦合线方向积分,积分最小值对应的参数耦合线即为多普勒参数耦合线的理论值。图15示出了多普勒参数耦合线的理论值及声源真实的运动参数所在位置(图中三角星处),取参数耦合曲线中真实的最近距离903m处速度值为2.51m/s,与真实的速度值基本一致。
[0053]
以上对本技术的具体实施方式作了详细介绍,对于本技术领域的技术人员来说,在不脱离本技术原理的前提下,还可以对本技术进行若干改进和修饰,这些改进和修饰也属于本技术权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1