光伏发电逐日系统控制方法、电子设备及存储介质与流程
本发明涉及光伏发电设备的控制,特别涉及一种光伏发电逐日系统控制方法、电子设备及存储介质。
背景技术:
1、在碳达峰与碳中和目标任务下,能源结构将会发生颠覆性变革。传统的以化石能源为主的能源结构由于大量的碳排放将不再适用,具有零碳排放特点的光伏发电将会成为今后新能源结构的重要组成。
2、中国具有丰富且可再生的太阳能资源,如何高效的利用太阳能资源成为了光伏发电技术的核心问题。相关研究显示,光伏发电面板追踪系统相比于固定式系统太阳能捕获效率高出37%,因此光伏发电逐日系统的精确度是提高太阳能资源捕获效率的关键。目前,光伏发电逐日系统主要采用钟式跟踪方式与光电式跟踪方式。钟式跟踪方式通过计算太阳运动角度来控制电机匀速带动光伏面板转动实现跟踪,具有跟踪精度不高、需要定期校正的缺点;光电式跟踪方式通过传感器检测及一系列信号转换实现对太阳位置的跟踪,能够通过反馈调节提高精度,但决策方式复杂易出现误动。
3、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的之一在于,提供一种光伏发电逐日系统控制方法、电子设备及存储介质,从而改善现有光伏发电逐日系统的跟踪控制精度,降低决策过程的复杂度。
2、本发明的另一目的在于,提供一种光伏发电逐日系统控制方法、电子设备及存储介质,从而提高光伏发电的发电效率。
3、为实现上述目的,根据本发明的第一方面,本发明提供了一种光伏发电逐日系统控制方法,包括如下步骤:
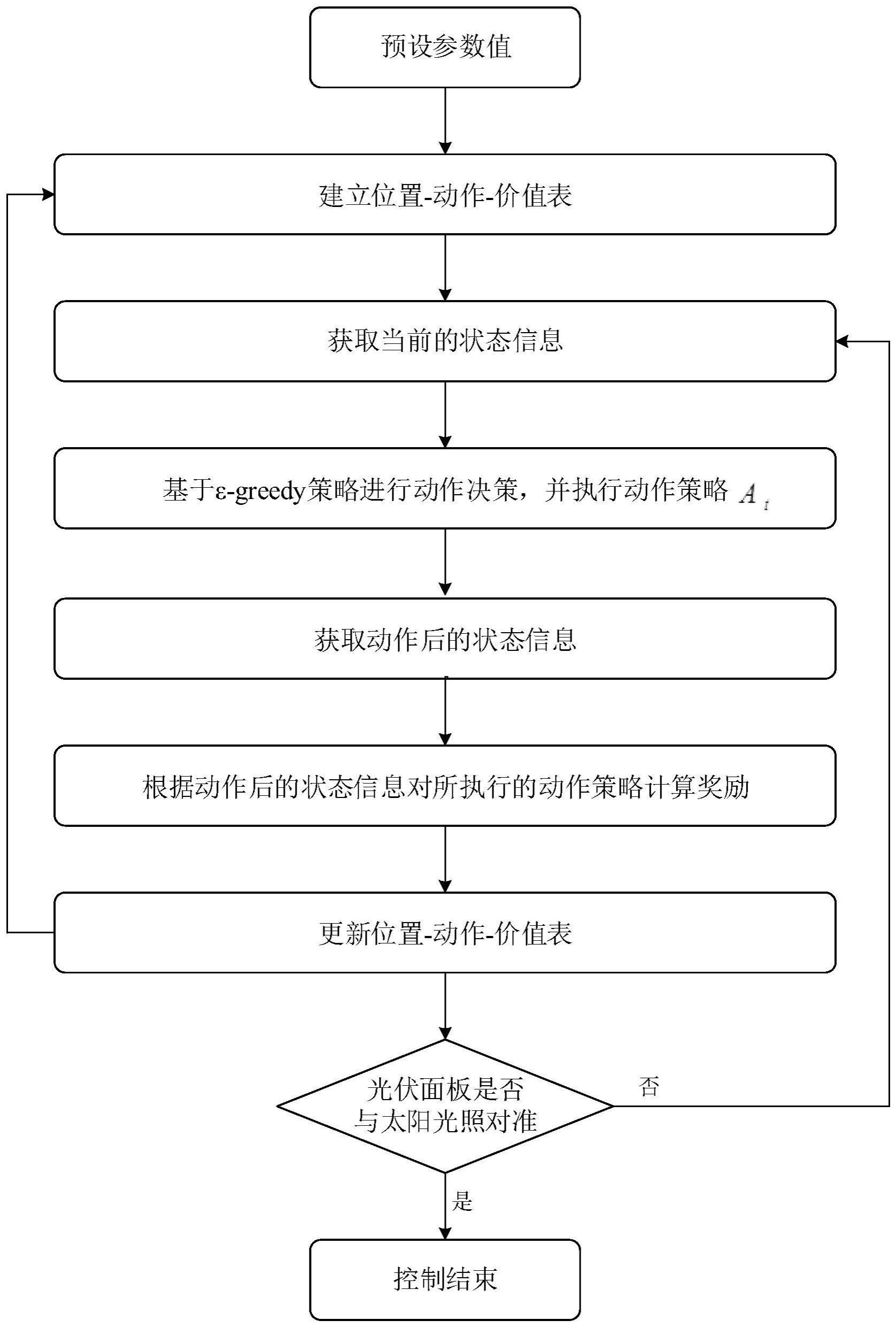
4、s110预设参数值,参数包括自主学习率α、奖励衰减率γ和贪婪度ε;
5、s120建立位置-动作-价值表,每一行表示光伏面板和太阳的位置状态,每一列表示可执行的动作策略,每一个位置状态下执行动作策略后进行动作策略价值的评价,评价值用q表示,位置-动作-价值表的初始评价值设置为零值;
6、s130获取当前的状态信息st=[sa(x,y),ss(x,y),pt(u,i)],其中sa(x,y)、ss(x,y)分别为当前光伏面板和太阳在标准坐标系下的位置坐标,pt(u,i)为当前光伏面板直流发电侧的功率值;
7、s140基于ε-greedy策略进行动作决策,并执行动作策略at;
8、s150获取动作后的状态信息st+1=[s'a(x,y),s's(x,y),pt+1(u,i)],其中s'a(x,y)、s's(x,y)分别为动作后光伏面板和太阳在标准坐标系下的位置坐标,pt+1(u,i)为动作后光伏面板直流发电侧的功率值;
9、s160根据动作后的状态信息st+1对所执行的动作策略at计算奖励rt+1(st+1|at);
10、s170更新位置-动作-价值表,更新规则为
11、qnew(st,at)=qold(st,at)+α(rt+1+γ·q(st+1,a*)-qold(st,at)),
12、式中,qnew(st,at)为当前状态的更新评价值,qold(st,at)为当前状态的原评价值,q(st+1,a*)为动作后的状态下执行最优动作策略a*产生的最大估计评价值;以及
13、s180检测光伏面板是否与太阳光照对准,若对准,则控制结束,若未对准,则返回步骤s130。
14、进一步,上述技术方案中,自主学习率α表示从动作后的状态反馈中学到的新奖励值占自身奖励的比重,α取值范围为0~1,α取值越大表示从动作后的状态学到的信息越多。
15、进一步,上述技术方案中,奖励衰减率γ为未来奖励的重要性,γ取值范围为0~1,γ取值越大表示决策时越重视远期奖励。
16、进一步,上述技术方案中,贪婪度ε为决策动作时选择已有经验最优值的概率,1-ε为决策动作时随机选择动作的概率,ε取值范围为0~1。
17、进一步,上述技术方案中,标准坐标系根据光敏阵列板上光敏电阻的排列建立;通过太阳光聚光后投射在光敏阵列板上,根据不同光敏电阻反馈的电流值的大小来确定太阳在标准坐标系下的位置坐标。
18、进一步,上述技术方案中,当前状态可执行动作空间集为at=[ax,ay,a0],式中ax、ay分别为光伏面板在标准坐标系下沿水平方向与垂直方向运动的位移,a0为复位动作,当ss(x,y)为零时,判定此时日落,发出复位指令并执行。
19、进一步,上述技术方案中,当前状态可执行动作空间集的动作约束为:
20、
21、式中,amin、amax分别为可执行的最小动作值和最大动作值。
22、进一步,上述技术方案中,奖励模型为
23、
24、式中,rδs(sa,ss)为光伏面板和太阳在标准坐标系下的坐标位置的差值奖励,rδp(pt+1,pt)为光伏面板直流发电侧当前功率值与动作后功率值的差值奖励,β为奖励评价因数,β为常数。
25、进一步,上述技术方案中,步骤s170包括:
26、当rt+1(st+1|at)=1时,光伏面板与太阳光照对准,则控制结束;以及
27、当rt+1(st+1|at)≠1时,返回步骤s130。
28、进一步,上述技术方案中,在当地日出时间与日落时间之间,该方法的运行间隔为1s~60s。
29、根据本发明的第二方面,本发明提供了一种电子设备,其包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;其中,存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器执行如上述技术方案中任意一项的光伏发电逐日系统控制方法。
30、根据本发明的第三方面,本发明提供了一种非暂态计算机可读存储介质,非暂态计算机可读存储介质存储有计算机可执行指令,计算机可执行指令用于使计算机执行如上述技术方案中任意一项的光伏发电逐日系统控制方法。
31、与现有技术相比,本发明具有如下有益效果:
32、1.本发明采用人工智能决策方法,能够使光伏发电系统模拟人脑思维方式决策并执行逐日跟踪动作策略,从而提高光伏发电逐日系统的跟踪控制精度,降低了决策过程的复杂度。
33、2.本发明通过实时获取太阳及光伏面板的位置坐标,并根据动作策略选择性执行历史最优动作方式或者探索新的动作方式,并将决策方案动作于光伏面板以执行逐日跟踪动作策略,避免陷入局部最优解。
34、3.本发明对所执行的动作策略进行价值评估,并更新位置-动作-价值表,以为下一次决策选择最优执行动作策略,能够始终保持光伏面板正对太阳光照,实现更高的光伏发电效率。
35、4.在动作后的状态下得到环境反馈的新位置信息、与奖惩机制反馈的奖惩信息,根据反馈信息进行学习并更新决策方式,至下一周期进行新一轮思维决策,不断执行这一循环以实现光伏面板不断跟踪太阳轨迹运动。
36、5.本发明的奖励模型包括位置奖励因素和功率奖励因素,光伏面板的位置差值和功率值差值越小,奖励值越高,表示跟随太阳运动的效果越好。
37、上述说明仅为本发明技术方案的概述,为了能够更清楚地了解本发明的技术手段并可依据说明书的内容予以实施,同时为了使本发明的上述和其他目的、技术特征以及优点更加易懂,以下列举一个或多个优选实施例,并配合附图详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!