基于地形约束与深度学习的晨昏雾快速检测方法、装置、设备及介质
1.本发明涉及环境监测与气象预报领域,特别涉及一种基于地形约束与深度学习的晨昏雾快速检测方法、装置、设备及介质。
背景技术:
2.雾,即一种悬浮在空气中的微小水滴,在晨昏时刻易发,会对能见度产生重要影响,严重威胁交通安全;空气中污染物也极易溶解在雾滴中,影响人们的呼吸健康;此外,雾滴附着在输电线路表面会形成导电层,引发“污闪”现象,威胁用电安全。精准的雾检测手段是降低雾损失和影响的重要前提。
3.传统陆地雾检测主要依赖气象观测站点资料,受时空分辨率限制,不能够形成连续区域性检测结果,时空代表性较低。遥感影像具有空间连续,时间分辨率高的特点,可有效弥补站点检测的缺陷。目前的遥感雾检测算法主要是针对白天和夜间所开发,白天雾检测主要依赖于光谱信息,此时遥感影像上光照充足,易于雾的识别与提取;在夜间雾检测中,目前广泛应用的还是3.7μm和11μm波段的亮度温度之差,该方法简单高效,但仅适用于夜间雾检测,且对雾与低云区分度较差。在晨昏时刻,由于光照不均匀,雾的光谱信息较为复杂,且随着时间变化,受光照影响,晨昏时刻雾的光谱信息极易发生突变。因此基于白天和夜间开发的雾检测手段并不能够直接应用于晨昏雾检测。
4.同时,雾的发生还会收到海拔和地形的影响。大雾在靠近地面的地方聚集,雾的基底高度低,具有接地的特性,这使得其容易受到地形起伏的影响。将dem与传统雾检测指标如r0.86/r0.64、r0.86/r1.6和bt11-bt3.9相结合,提高了云与雾霾、晴空识别的准确性,但因海拔和地形的尺度与光谱纹理特征差异较大,其结合具有一定的难度。
技术实现要素:
5.本发明的目的在于,针对现有技术不足,提供一种基于地形约束与深度学习的晨昏雾快速检测方法、装置、设备及介质,能够准确、高效快速地实现晨昏陆地雾检测。
6.为实现上述技术目的,本发明采用如下技术方案:
7.一种基于地形约束与深度学习的晨昏雾快速检测方法,包括:
8.步骤1,获取研究区域的dem数据和晨昏时刻的h8/ahi数据;
9.步骤2,对步骤1获取的数据进行预处理,其中包括:对h8/ahi数据进行波段裁剪和无用波段剔除,然后将保留的各波段数据和dem数据按通道进行组合,得到融合的ahi-dem数据;
10.步骤3,将ahi-dem数据输入至预训练好的基于深度学习的晨昏雾检测模型中,输出得到研究区域的晨昏雾检测结果。
11.进一步地,所述晨昏雾检测模型基于u-net网络,并在前3个编码层中,在卷积层和池化层之间引入se-net注意力模块。
12.进一步地,步骤1获取到的h8/ahi数据包括16个波段,在剔除无用波段后保留得到编号分别为3、5、6、7、11、13、14的7个波段,波长对应分别为:0.64μm、1.60μm、2.30μm、3.90μm、8.60μm、10.4μm、11.2μm。
13.进一步地,所述预训练好的基于深度学习的晨昏雾检测模型,其训练样本的制作方法为:
14.基于晨昏线过境时刻其东西两侧光照条件的不同,将研究区域划分为白天子区域、夜间子区域和晨昏子区域;
15.基于纹理光谱特征对白天子区域中的像元进行雾判别标注,基于编号7和11双通道的亮温差特征对夜间子区域中的像元进行雾判别标注,基于运动特征对晨昏子区域中的像元进行雾判别标注,得到研究区域的雾掩膜数据;研究区域的ahi-dem数据与雾掩膜数据构成一个训练样本。
16.进一步地,在基于纹理光谱特征、亮温差特征和运动特征对像元进行雾判别标注后,再进一步根据地面观测数据中的能见度和空气相对温度,对像元的标注进行修正。
17.进一步地,所述晨昏时刻是指太阳高度角位于区间[0
°
,25
°
]的时刻。
[0018]
进一步地,在使用训练样本训练得到晨昏雾检测模型时,引入adam梯度下降算法和批归一化训练调整训练策略。
[0019]
一种基于地形约束与深度学习的晨昏雾快速检测装置,包括:
[0020]
原始数据获取模块,用于:获取研究区域的dem数据和晨昏时刻的h8/ahi数据;
[0021]
数据预处理模块,用于:对获取到的dem数据和晨昏时刻的h8/ahi数据进行预处理,其中包括:对h8/ahi数据进行波段裁剪和无用波段剔除,然后将保留的各波段数据和dem数据按通道进行组合,得到融合的ahi-dem数据;
[0022]
晨昏雾检测模型,基于深度学习网络,用于:根据预处理得到的ahi-dem数据智能获得研究区域的晨昏雾检测结果。
[0023]
一种电子设备,包括存储器及处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器实现上述任一项所述的晨昏雾快速检测方法。
[0024]
一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述的晨昏雾快速检测方法。
[0025]
有益效果
[0026]
本发明基于地形约束和强化通道域注意力机制的晨昏雾检测模型,对研究区域的晨昏雾进行快速检测,与现有技术相比,所具有的有益效果为:
[0027]
可检测出大面积和大范围的雾;对雾区边缘检测结果更加细化,雾区边界更清晰,可有效解决雾区消散阶段、晨昏线附近和远离晨昏线的白天区域低云/中云误检问题,具有较高的可靠性和良好的泛化性,检测结果相对稳定,不易造成误检,非常好的解决了晨昏时段尤其是晨昏线附近雾与地表难以分离的难题;对晨昏雾检测较快,简单高效,人为干预较少,可近实时获得检测结果,较好地满足大范围陆地晨昏雾实时检测要求,具有良好的应用前景。
附图说明
[0028]
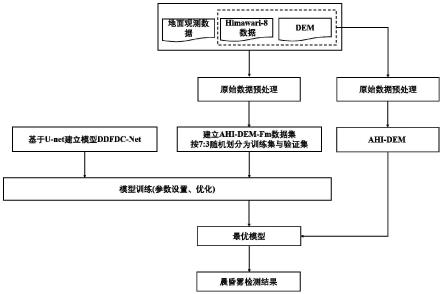
图1为基于地形约束的深度学习晨昏雾快速检测算法流程图;
[0029]
图2为ahi-dem-fm数据集的制作流程图;
[0030]
图3为制作的数据集示例(r(0.64μm)g(1.6μm)b(2.3μm));
[0031]
图4为本发明关注的研究区域地形、遥感影像和观测站点分布图;
[0032]
图5为ddfdc-net模型结构图;注:se-net提取的特征用橙色块突出显示,bn和relu位于整个ddfdc-net架构的卷积层之后。
[0033]
图6为2016年11月18日早晨h8/ahi假彩色影像与卫星雾检测结果图;其中,(a)(b)为07:00h8/ahi假彩色影像与卫星雾检测结果图;(c)(d)为07:30h8/ahi假彩色影像与卫星雾检测结果图;(e)(f)为08:00h8/ahi假彩色影像与卫星雾检测结果图;(g)(h)为08:30h8/ahi假彩色影像与卫星雾检测结果图;注:图中绿线为晨线,(e)(f)图叠加了上午8点的地面验证数据,r(3.9μm)g(8.6μm)b(11.2μm);
[0034]
图7为2016年11月18日黄昏h8/ahi假彩色影像与卫星雾检测结果图;其中,(a)(b)为15:30h8/ahi假彩色影像与卫星雾检测结果图;(c)(d)为16:00h8/ahi假彩色影像与卫星雾检测结果图;(e)(f)为16:30h8/ahi假彩色影像与卫星雾检测结果图;(g)(h)为17:00h8/ahi假彩色影像与卫星雾检测结果图;注:图中绿线为昏线,(g)(h)图叠加了下午17:00点的地面验证数据,r(3.9μm)g(8.6μm)b(11.2μm);
[0035]
图8为早晨8:00h8/ahi假彩色影像与u-net和ddfdc-net卫星雾检测结果图;其中,(a)(b)(c)为2016年11月18日;(d)(e)(f)为2016年12月12日;注:图中绿线为晨线,r(3.9μm)g(8.6μm)b(11.2μm);
[0036]
图9为黄昏17:00h8/ahi假彩色影像与u-net和ddfdc-net卫星雾检测结果图;其中,(a)(b)(c)为2016年11月18日;(d)(e)(f)为2016年12月11日;注:图中绿线为昏线,r(3.9μm)g(8.6μm)b(11.2μm)。
具体实施方式
[0037]
下面对本发明的实施例作详细说明,本实施例以本发明的技术方案为依据开展,给出了详细的实施方式和具体的操作过程,对本发明的技术方案作进一步解释说明。
[0038]
本实施例提供一种基于地形约束与深度学习的晨昏雾快速检测方法,参考图1所示,包括以下步骤:
[0039]
步骤1:获取研究区域的dem数据和晨昏时刻的h8/ahi数据;
[0040]
h8/ahi数据是由静止气象卫星h8(himawari-8)搭载的ahi传感器(advanced himawari imager)所获取遥感影像数据,简称h8/ahi数据。
[0041]
晨昏时刻的定义:根据太阳高度角(太阳光入射方向与地平面之间的夹角,与太阳天顶角互余,太阳高度角越高,太阳向下的辐射越强,正午时刻太阳高度角最高)筛选研究区域含晨昏时刻的遥感影像,在ahi数据中可以直接获取太阳天顶角,将晨昏时刻的太阳高度角定义为[0
°
,25
°
],即太阳天顶角[65
°
,90
°
]。
[0042]
dem(digital elevation model,数字高程模型数据)为美国地质调查局发布的srtm1-dem数据。
[0043]
图4展示了本实施例关注的研究区域地形、遥感影像和观测站点分布图。
[0044]
步骤2,对步骤1获取的数据进行预处理,其中包括:对h8/ahi数据进行波段裁剪和无用波段剔除,然后将保留的各波段数据和dem数据按通道进行组合,得到融合的ahi-dem数据;
[0045]
对本实施例中后续使用的h8/ahi数据、dem数据、地面站点数据进行预处理操作:
[0046]
(1)h8/ahi数据的预处理步骤包括:
[0047]
步骤a1:辐射定标。将h8/ahi原始影像中的dn值转换为反射率值或亮度温度,原始ahi数据中有16个波段,其中1-6波段被定标为反射率、7-16波段被定标为亮温;
[0048]
步骤a2:投影转换。将定标后的ahi数据统一转换到wgs-84坐标系下,同时将数据空间分辨率重采样至2km;
[0049]
步骤a3:波段裁剪和海陆掩膜裁剪。原始ahi数据中有16个波段,需要进行波段裁剪,以剔除无用波段,所保留的7个波段为3(0.64μm)、5(1.60μm)、6(2.30μm)、7(3.90μm)、11(8.60μm)、13(10.4μm)、14(11.2μm);
[0050]
本实施例中研究区域ahi数据的幅宽较大,且不包括部分海洋区域,利用envi5.3中的subset data工具,借助标准中国陆地边界shp文件对ahi数据进行掩膜处理,将海洋部分的像素值赋0。
[0051]
(2)dem数据
[0052]
dem(digital elevation model,数字高程模型数据)为美国地质调查局发布的srtm1-dem数据,数据原始空间分辨率30m,为与ahi数据保持一致,将其投影至wgs-84坐标系下,并重采样至2km。
[0053]
(3)地面观测数据
[0054]
地面观测数据指的是地面气象站点记录的全要素micaps-diamond1填图数据,将“能见度”小于等于1km,“现在天气现象”编码为40~49的地面站点标注为有雾站点;其中:在有雾站点中,将能见度在50-200m的标记为浓雾站点,能见度在200~500m的标记为中雾站点,能见度为500-1000m的记为轻雾站点,大于1km为无雾站点;此外,将“能见度”为1~5km、“空气相对湿度大于90%”的站点标记为轻雾站点。
[0055]
(4)dem与ahi通道融合
[0056]
将dem作为一个通道,与裁剪后的ahi数据相融合,数据维度由原来的7通道变为8通道,最终构建含晨昏时刻融合的ahi-dem数据。
[0057]
步骤3,将ahi-dem数据输入至预训练好的基于深度学习的晨昏雾检测模型中,输出得到研究区域的晨昏雾检测结果。
[0058]
在使用预训练好的基于深度学习的晨昏雾检测模型之前,需要预先使用训练样本对深度学习网络进行训练得到,以下分别对训练样本数据集的制作、模型的搭建和训练等进行介绍。
[0059]
(1)构建晨昏时刻数据集ahi-dem,制作雾掩膜数据集fm。参考图2所示。
[0060]
目前公开的遥感训练数据集中没有h8/ahi雾掩膜数据集,同时为细化模型在雾区边缘的识别精度,将dem添加到ahi数据中,利用地面观测站点数据、ahi数据和dem数据基于雾、地表和云的光谱、纹理和运动特征,逐像素在原始影像中标注雾像元,建立ahi-dem-fm数据集,进行训练与验证。
[0061]
步骤b1:构建含晨昏时刻数据集ahi-dem。根据太阳高度角(太阳光入射方向与地
平面之间的夹角,与太阳天顶角互余,太阳高度角越高,太阳向下的辐射越强,正午时刻太阳高度角最高)筛选研究区域含晨昏时刻的遥感影像,在ahi数据中可以直接获取太阳天顶角,将晨昏时刻的太阳高度角定义为(0
°
,25
°
),即太阳天顶角(65
°
,90
°
)。
[0062]
步骤b2:进行波段裁剪和海陆掩膜裁剪,原始ahi数据中有16个波段,多余波段会减缓模型训练速度,因此需要进行波段裁剪,剔除无用波段,所保留的7个波段为3(0.64μm)、5(1.60μm)、6(2.30μm)、7(3.90μm)、11(8.60μm)、13(10.4μm)、14(11.2μm);ahi数据幅宽较大,在一幅影像数据中会包含部分海洋区域,利用envi5.3中的subset data工具,借助标准中国陆地边界shp文件对ahi数据进行掩膜处理,将海洋部分的像素值赋0;将dem作为一个通道,与裁剪后的ahi数据相融合,数据维度由原来的7通道变为8通道,最终构建含晨昏时刻数据集ahi-dem。
[0063]
步骤b3:制作雾掩膜数据集fm。借助envi5.3中的roi工具,在晨昏时刻数据集ahi-dem数据上标注雾像元,制作雾掩膜数据集fm,并将其存储为二值单通道tif格式影像。(图3为制作的数据集示例)。
[0064]
其中,受地球自转影响,由于研究区影像幅宽较大(东经104.5
°
~136
°
),使得在晨昏线过境时刻,晨昏线东西两侧光照条件有所不同,早晨时刻,晨昏线东侧处于白天,西侧处于夜间;黄昏时刻,晨昏线西侧处于白天,东侧处于夜间。按照光照条件不同,将晨昏时刻研究区域划分为三种类型,白天区域、夜间区域和晨昏区域。受太阳光照影响,白天区域各类地物包含发射和反射特征,而夜间只含发射特征。借助tsd(texture and spectral difference)、btd(bright temperature difference)、vi(visual interpretation)三种方法将像元判别为白天区域、夜间区域和晨昏区域三种不同时刻雾。
[0065]
tsd特征为白天雾和云、地表的纹理光谱差异,雾贴近地面,顶部光滑、起伏小,边界清晰整齐,在影像上表现纹理均匀,边缘整齐连续;云种类复杂,顶部起伏剧烈,影像上表现为纹理粗糙和边界破碎;白天区域光照充足,云雾的反射率值明显高于地表,云雾与地表在影像上亮度的对比明显,地表的低反射性及云、雾在纹理方面的差异,可作为晨昏时刻影像中白天区域的雾判别依据;
[0066]
btd特征为7和11两通道间的亮温差主要应用于夜间雾判别,夜间雾判别的难点在于地表与雾分离,因为夜间反射率波段并不可用,由于雾贴近地表,在夜间的亮温波段上,雾与地表近乎没有差异。对于夜间雾来说,它在3.7μm通道中的发射率为~0.8,而在11μm通道中的发射率为~1,因此在夜间,雾的两通道间的差值~(-4)k,而对于地表,其夜间在两个通道中的信号值并无明显差异,两通道差值~0;
[0067]
vi特征为雾的运动特征,在晨昏线过境区域,雾分离困难,但相较于云和地表,雾具有独特的运动特征;随时间变化,地表是静止不动的,而云主要表现为飘移运动,且云的运动速度要明显高于雾,雾在时序遥感影像中的运动特征主要表现为面积的扩张或缩小,雾区中心及内部结构在一定时间内保持稳定,通过分析相邻30min遥感影像中地物的运动特征,可以有效判别雾区,主要用于判别晨昏时刻与地表光谱信息一致的雾。
[0068]
步骤b4:结合地面观测数据校准雾掩膜数据集fm,由于人工标注的雾区会存在偏差,因此需借用地面观测数据进行校准,剔除标签有雾而其对应的地面站点无雾的区域,保证雾掩膜数据集fm的准确性。
[0069]
步骤b5:建立ahi-dem-fm数据集。为提高模型的训练效率和边缘信息的学习效果,
需要将晨昏时刻数据集ahi-dem和雾掩膜数据集fm进行裁剪,裁剪方式为30%的重叠裁剪(相邻图片含有30%重叠度),原图ahi-dem裁剪成8通道256*256像素的tif格式影像,掩膜数据fm裁剪成256*256像素的单通道tif格式影像,形成ahi-dem-fm数据集。
[0070]
(2)建立ddfdc-net模型,即:基于u-net网络,并在前3个编码层中,在卷积层和池化层之间引入se-net注意力模块,消除dem数据和同幅遥感影像中不同太阳高度角对像元光谱特征的影响,提升网络的泛化性能。参考图5所示,具体地:
[0071]
步骤c1:ddfdc-net网络左侧为编码阶段(称为编码器),由5组卷积层(cl)、4组池化层(mpl)和3组se-net模块(置于前三个卷积层和池化层之间)构成。卷积层通过3*3的卷积核提取含晨昏时刻数据集ahi-dem中晨昏雾的特征信息,在每次卷积后进行批归一化训练(bn)操作,之后利用relu函数进行非线性激活,之后利用se-net模块进行通道注意力学习,学习每个特征通道的权重,将权重与对应的通道相乘获得增加通道注意力权重的特征通道,之后进入池化层学习。
[0072]
步骤c2:池化层通过2*2的池化窗口选取窗口中4个像素的最大值作为池化后的当前像素,以此对特征信息进行降维,完成特征图的下采样。
[0073]
步骤c3:网络右侧为4组卷积层和4组上采样层构成的解码阶段(称为解码器),用于逐步恢复特征图的尺寸。利用跳跃链接将每次解码阶段得到的特征图与对应的编码阶段特征图融合,建立上下文的特征信息连接,补偿下采样池化层中丢失的信息,完成模型空间上下文语。
[0074]
(3)训练ddfdc-net模型,即训练获得晨雾快速检测模型。
[0075]
本实施例引入adam梯度下降算法和批归一化训练(bn)调整训练策略,加快模型训练的收敛速度和避免过拟合,得到最优的网络模型。
[0076]
步骤d1:将ahi-dem-fm数据集按7:3比例随机划分为训练集和验证集(训练集:2184张影像,验证集:936影像)作为输入数据训练和验证ddfdc-net模型。
[0077]
步骤d2:训练平台配置参数为:图形处理器(gpu):nvidia geforce rtx 2080ti、编程语言:python3.6.6、框架:pytorch1.5.1、运算平台(cuda):10.0;在此基础上设计模型参数。
[0078]
步骤d2.1设置模型参数batch size=8,即每一训练批次使用8张影像(其数目与电脑和gpu性能有关);
[0079]
步骤d2.2设置模型参数epoch=1500,即模型迭代的最大轮数(达到该轮数后模型终止迭代);
[0080]
步骤d2.3设置模型参数α
initial
=0.0035,即初始学习率,其中:学习率的大小影响参数更新的速度,学习率过大可能导致模型最终不收敛,学习率过小会使模型收敛速度过慢,训练时间显著增加。模型开始训练时参数更新速度快,模型收敛时参数更新速度慢,因此在训练过程中需要动态更新模型学习率,保证模型开始训练时学习率较大,收敛时学习率较小;
[0081]
步骤d2.4设置模型参数decaying epoch=1440,即学习率开始调整的轮次,模型在该轮数后动态调整的学习率α为(根据以下公式):
[0082][0083]
步骤d3:输出初步预测结果,最后一个卷积层使用sigmoid函数输出模型预测的每个像素的目标概率,设置阈值0.5完成目标像素/非目标像素的分类,低于阈值0.5设置为目标像素,得到模型预测的目标掩膜分类结果图,完成像素的初始分类。
[0084]
步骤d4:将预测结果和真值作比较,计算初始分类和真实雾掩膜的偏差。根据偏差利用误差反向传播算法计算每个参数的梯度,根据梯度动态调整并获取一组新的参数。
[0085]
作为一种优选方案,模型参数更新的优化器选用adam优化器,且在每个池化层(cl)和非线性激活层(relu)之间增加批归一化训练(bn),提高训练速度,缩短训练时间;
[0086]
为了防止模型过拟合,在训练过程中只保留最优轮模型参数:若当前轮的训练精度iou高于上一轮,则采用当前轮的模型参数。同时为了检验模型效果,获取最优模型,训练过程间隔设置为25轮,每隔25轮利用验证集获取1次验证精度,验证精度评价指标定义为:交并比iou、准确率accurary、调和平均f1-score,定义如下:
[0087][0088][0089][0090]
其中:ground truth表示模型预测的图像中为雾的像素总数,ground truth表示图像对应标签中为雾的像素总数;correctly classified pixels为正确分类的像素个数,total pixels为被分类的像素总数;precision表示被预测为雾的像素中占所有雾像素的比例,recall表示所有为雾的像素中被预测为雾的像素的比例,上述检测指标范围均为0-1,iou越大,表示分割精度越高。
[0091]
步骤d5:重复上述步骤d2-d4,不断迭代,直到验证精度不再明显上升,模型训练成功,得到晨昏雾快速检测模型。
[0092]
上述训练得到的晨昏雾快速检测模型,此时即可用于步骤3根据新来的融合的ahi-dem数据对相应的研究区域进行晨昏雾快速检测,得到雾检测结果。
[0093]
下面再对本发明的ddfdc-net模型检测结果精度验证:
[0094]
选取中国气象局2016年11月17日-2017年1月3日晨昏卫星影像对应时刻8:00和17:00的地面观测数据,验证ddfdc-net算法的精度。
[0095]
图6展示出了2016年11月18日7:00-8:30h8/ahi假彩色影像与卫星雾检测结果。图6(e)地面观测数据(8:00)显示该区域中西部出现了大范围轻度雾。8:00检测结果显示,研究区域中西部有较大范围雾,算法检测结果与地面观测数据具有高度的一致性(图6(f))。从检测结果来看,雾面积有增减趋势,表明ddfdc-net可以有效的捕捉雾的生消发展过程。其中,图6(b)表明该时刻雾正处于形成阶段,受低云影响,雾区内部较为零散,检测结果不完整;图6(d)表明该时刻已形成较稳定的雾区,检测结果完整,雾区在日出前范围达到最大;随着晨昏线继续向西移动,图6(f)和图6(h)中雾区东部处于白天一侧受太阳辐射影响,
地表温度迅速增加,部分轻雾开始抬升。算法在晨昏线右侧(图6(f)中圆形框所示)发生漏检,原因可能为处于消散状态的雾顶部表现出低云特征;受被动传感器影像特征影响,中高云遮挡底部雾特征,算法无法实现云下雾检测(图6(f)中矩形框所示)。
[0096]
图7展示出了2016年11月18日15:30-17:00h8/ahi假彩色影像与卫星雾检测结果。图7(g)地面观测数据(17:00)显示该区域中部和东北部出现了大范围轻度雾。17:00的检测结果显示,研究区域中部和东北部有大范围雾,算法检测结果与地面观测数据具有高度的一致性(图7(h))。卫星检测结果表明雾的面积从15:30到17:00在增加,算法可以有效捕捉黄昏雾的演变过程。对比卫星影像图和算法检测结果发现,算法在16:30(图7(f))晨昏线左侧白天区域发生误检,分析地形特征发现,该区域地形起伏较大,低云覆盖率较高,算法将低云误判为雾。算法在17:00时刻(图7(h))晨昏线右侧夜间区域发生漏检。除此之外,15:30到17:00长达90min的雾检测结果检测出研究区域内80%以上的雾区。
[0097]
选择地面观测数据定量验证算法的检测精度,采用常用指标评价体系,包括正确率pod(probability of detection)、误警率far(false alarm ratio)和可靠性因子csi(critical success index)对检测结果进行评价。上述指标定义为:
[0098][0099][0100][0101]
式中:n
x
为检测个数,其下标x为检测指标种类,包括h、m和f(h表示卫星检测结果与地面观测结果一致,即正确检测;m表示卫星检测结果中没雾而地面数据显示有雾,即失误检测;f表示卫星检测结果中有雾而地面数据显示没雾,即错误检测)。上述检测指标范围均为0-1,pod越大表示检测精度越高;csi越大说明方法越有效。
[0102]
表1展示出2016年11月18日-2017年1月3日随机5天的8:00雾检测精度。5天8:00卫星雾检测正确率平均值为84.0%,误警率平均值为16.4%,可靠性因子平均值为72.0%。算法正确率较高,其中2017年1月3日卫星雾检测的误检率最高,可靠性因子最小。进一步分析其原因为:这主要是由于内蒙古自治区和东北地区处于夜间状态,红外波段很难分离该地区的低云。
[0103]
表1早晨8:00雾检测精度
[0104][0105]
表2展示出2016年11月17日-2017年1月3日随机5天17:00雾检测精度。5天17:00的检测结果正确率平均值为83.7%,误检率平均值为15.8%,可靠性因子平均值为72.6%。算法在晨昏时刻均具有较高的精度和可靠性。
[0106]
表2黄昏17:00雾检测精度
[0107][0108]
为了进一步验证ddfdc-net模型的季节适应性,随机选取2017年2-10月8次早晨雾案例和5次黄昏雾案例共计13个雾案例结合近同步的地面观测数据定量验证ddfdc-net模型雾检测精度。其中:4-7月黄昏雾案例较少,且雾区面积较小,导致季节性验证中黄昏雾案例低于早晨。季节变化导致雾形成时间和晨昏线过境时间均发生变化,实验选取晨昏时刻雾面积最大的雾案例结合地面观测数据进行算法精度验证,如2月、3月选择08:00地面验证数据、5月~10月选择05:00的地面观测数据定量验证模型雾检测精度。检测结果精度见表3和表4,可知:
[0109]
(1)8次早晨雾案例检测的pod为66.8%,far为45.1%,csi为43.6%,5次黄昏雾案精度分别为68.0%,far为32.3%,csi为49.8%。算法总体正确率良好。
[0110]
(2)与训练数据接近的季节和月份算法呈现出较高的精度,如早晨雾2月、3月和10月案例检测的pod为76.6%,far为33.7%,csi为55.2%,但与表1冬季时刻雾检测结果精度相比,三个指标分别下降近7%、17%、17%。
[0111]
(3)较远季节和月份算法检测精度逐渐降低,如早晨雾5月~9月案例检测的pod为60.8%,far为52%,csi为36.7%,与表1冬季雾检测结果精度相比,三个指标分别下降近23%、36%、35%。
[0112]
(4)算法检测结果精度随距算法训练数据的时间增大而减小,其主要原因应为ddfdc-net模型受训练数据影响较大,雾光谱特征随季节发生变化,导致训练数据未涉及的季节模型检测效果较差。如对各个季节制作训练数据集训练ddfdc-net季节模型,有望获得更好的雾检测结果。
[0113]
(5)在对比算法检测结果和原始遥感图像中发现,算法夏季和秋季检测精度受研究区域云量的显著影响。在研究区域内仅存在单一天气现象雾时,算法夏季的检测精度极高,其主要原因为夏季地表与雾/云的光谱纹理差异极大。但因夏季低云(液态水云)较多,易被误判为雾,造成检测精度下降。而秋季研究区域内云量较多,误判率亦上升。
[0114]
表3不同季节早晨雾的探测精度
[0115][0116]
表4不同季节黄昏雾的探测精度
[0117][0118]
u-net和ddfdc-net的检测精度对比验证
[0119]
随机选择2016年11月18日和12月12日08:00两次早晨雾案例、11月18日和12月11日17:00两次黄昏雾案例对u-net模型与ddfdc-net模型检测结果进行定性对比分析,u-net模型与ddfdc-net模型检测结果见图8和图9。
[0120]
由图8和图9可知:
[0121]
(1)图8(b)与8(c)中,圆形区域对比分析可知ddfdc-net模型雾区边缘检测结果更加细化,雾区边界更清晰;矩形区域对比分析可知u-net对影像中太阳高度角较高的白天区域的低云造成误判,ddfdc-net模型未误判;
[0122]
(2)图8(e)与8(f)中,左侧矩形区域和地面观测数据对比分析可知,该区域雾正处
于消散阶段,ddfdc-net与u-net均存在误判,但ddfdc-net误判范围较小;右侧矩形区域对比分析可知,ddfdc-net模型将地表与中高云误判为雾的区域较小;
[0123]
(3)图9(b)与9(c)中,地面验证与遥感影像显示研究区东部和中部地区发生大面积轻雾,该区域处于晨昏线右侧夜间区域,ddfdc-net和u-net模型的检测效果均较好,两种模型对大面积夜间轻雾具有较好的检测能力;
[0124]
(4)图9(e)与9(f)中,圆形区域对比分析可知该区域尽管地面验证数据显示有雾,但上方被中低云污染,两种模型在此区域均存在漏检,但u-net对雾区边缘的细化略微粗糙,有小部分低层云被误判为雾,ddfdc-net模型未误判;
[0125]
(5)图9(e)与9(f)中,相比u-net,ddfdc-net对甘肃陇南和天水一带、陕西榆林上空的低云误检具有一定改善作用,但由于甘肃陇南地处中国第二级阶梯和三级阶梯的过渡带,辖区内地形特征异常复杂,仍有较大部分低云被两个模型均误判为雾。
[0126]
以上实施例为本技术的优选实施例,本领域的普通技术人员还可以在此基础上进行各种变换或改进,在不脱离本技术总的构思的前提下,这些变换或改进都应当属于本技术要求保护的范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1