一种基于无人机激光雷达单木与森林地上生物量估算方法
1.本发明属于森林地上生物量监测技术领域,尤其涉及一种基于无人机激 光雷达单木与森林地上生物量估算方法。
背景技术:
2.气候变化已成为全球最为关注的话题,由于受自然以及人类活动的影响, 排放到大气中的二氧化碳浓度过高会引发一系列气候变化问题,如温室气体 效应、全球变暖、热岛效应等,是人类所面临的重大生态环境问题。森林是 世界上面积最大、结构最为复杂的陆地生态系统,具有净化空气、调节气候、 涵养水源等方面的功能,同时也是地球生物圈最主要的组成部分。众所周知, 森林在全球碳循环具有重要的意义,特别是在降低二氧化碳排放量的问题上, 因此,如何有效、准确地测量森林中储存和潜在的碳的能力,以及优化森林 的固碳能力日益受到广泛关注。
3.森林作为地球上最大的陆地生态系统,在全球碳循环中具有重要作用, 单木参数与森参数的获取为进一步研究森林地上生物量等参数反演奠定了基 础。森林地上生物量(above-ground biomass,agb)是评估森林碳储量和碳汇 能力的重要因素,同时也是森林生态系统健康评价的重要评价因子,森林地 上生物量对森林碳汇及生态系统评价等方面具有重大意义,也是估算森林生 物量是实施森林生态评估工作的重中之重。而计算森林地上生物量的数据主 要依赖于森林资源调查中获取的单木参数,包括树种、树木位置、树高、胸 径、冠幅、密度等参数,针对不同地区、不同树种的异速生长方程对其地上 生物量进行估算,其工作量大,估算难度和准确率低。然而如何快速、准确、 高效、低成本地获取单木参数和森林地上生物量估测是林业研究重点关注的 问题,也对森林生态环境监测和陆地生态系统的生产力相关研究中具有重大 的意义。虽然传统的森林测量方法和光学遥感数据采集过程中具有数据获取 便利、覆盖地域广、数据更新快等优点,在森林资源调查中占有重要优势容 易,但容易受到天气、地表覆盖等外界因素的干扰,从而使得遥感信息的损 失,对光照条件的依赖较强,致使同一类型的森林出现“同物异谱”的现象, 使得光学遥感数据的精度已经无法满足高精度的森林参数获取需求,给生物 量等各种森林参数的估算带来较大局限性。由于激光雷达(light detectionand ranging,lidar)技术的问世,可以有效地弥补光学遥感技术的缺陷,无 人机激光雷达具有很强的穿透能力,可以快速、高效、灵活、精细、低成本 的获取森林的空间结构信息和树冠层下的地形信息,进而能够准确提取单木 参数和森林地上生物量估测。
技术实现要素:
4.本发明的目的在于:提供一种基于无人机激光雷达单木与森林地上生物 量估算方法,本发明的估算方法能快速实现整个区域森林地上生物量的估算, 并对数据进行分割,可准确、有效、完整地获取单木参数,能有效地减少在 森林调查中对时间、人力及经济成本的消耗与浪费。为了实现上述目的,本 发明采用以下技术方案:
5.本发明提出一种基于无人机激光雷达单木与森林地上生物量估算方法, 其特征在于:所述估算方法包括以下步骤:
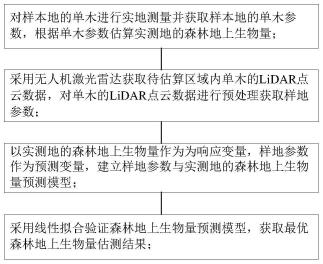
6.步骤1:对待估算区域内所有样本地的单木进行定位,以获取每单木的位 置坐标,对样本地的单木进行实地测量并获取样本地的单木参数,根据单木 参数估算实测地的森林地上生物量;
7.步骤2:以实地测量样本地的单木所在位置作为参考,采用无人机激光雷 达获取待估算区域内单木的lidar点云数据,对单木的lidar点云数据进 行预处理获取样地参数;
8.步骤3:以实测地的森林地上生物量作为为响应变量,样地参数作为预测 变量,建立样地参数与实测地的森林地上生物量预测模型,该森林地上生物 量预测模型满足:
[0009][0010]
式中的agp
p
表示样地森林地上生物量,k为大于等于1的样本数量,w
p,pi
为 距离权重,
[0011]
其中,d
pi,p
为样本地内单木之间的空间距离;
[0012]
步骤4:采用线性拟合验证森林地上生物量预测模型,获取最优森林地上 生物量估测结果。
[0013]
上述方案进一步优选的,采用线性拟合验证森林地上生物量预测模型的 过程包括如下过程:
[0014]
从样地参数中选取出一个数据样本作为测试集,其余的全部数据样本用 于训练集,重复此过程,获得k组训练集和测试集,依次进行训练和测试, 直到把所有数据样本被用于一次测试集,即可完成验证,最后计算k个样本 数据记录的预测误差的平均值;
[0015]
将预测误差的平均值用于线性拟合实测地的森林地上生物量,获得森林 地上生物量线性回归方程,作为森林地上生物量预测模型;
[0016]
筛选预测变量并使用多元线性方程进行拟合优化,直到满足预测变量个 数最少时,得到最优的森林地上生物量预测模型。
[0017]
上述方案进一步优选的,所述森林地上生物量多元线性方程满足:
[0018]
agb=-16.324+4.134*h
p
+27.143*lai;
[0019]
其中,agb为森林地上生物量预测值,h
p
为预测变量(高度百分位数), lai为叶面积指数。
[0020]
上述方案进一步优选的,所述将预测误差的平均值用于线性拟合实测地 的森林地上生物量主要采用自然对数形式对实测地的森林地上生物量进行拟 合。
[0021]
上述方案进一步优选的,对单木的lidar点云数据进行预处理包括如下 步骤:
[0022]
lidar点云数据以las格式存储,获取所存储的lidar点云数据,以估算 区域内样本地的单木最大树高为最大值,以2m为植被点云的分割阈值为最小 值,基于chm的分水岭分割对取样地单木lidar点云数据进行分割,获取取 样地单木的点云分割数据;
[0023]
对取样地单木分割的点云分割数据进行高程归一化处理,再对归一化后 的点云分割数据进行栅格化处理;
[0024]
采用中值滤波对栅格化处理的数据进行无效值填充,然后通过高斯平滑 窗口对
数据进行平滑处理,获取单木的样地参数;
[0025]
根据样地参数分别计算样地单木的算术平均高avgha、冠幅加权平均高 lorcha、胸径加权平均高dbha;其中,
[0026]
avgha为单木的算术平均高;hai为单木树高;n为单 木总株数;
[0027]
lorcha为单木的冠幅加权平均高;
[0028]
ca=(π
×
ce2)/4;ca为单木冠层面积,ce为单木冠幅。
[0029]
上述方案进一步优选的,采用自然对数形式对实测地的森林地上生物量 进行拟合主要分别对单木的算术平均高avgha、冠幅加权平均高lorcha和胸 径加权平均高dbha对应的生物量进行拟合计算;其中,算术平均高avgha、 冠幅加权平均高lorcha、胸径加权平均高dbha对应的生物量进行拟合计算分 别满足:
[0030]
agb1=5.201*avgha-22.213,拟合计算为:ln(agb1)=1.99*lnavgha-1.341; agb2=5.24*lorcha-24.112,拟合计算为:ln(agb2)=2.064*lnlorcha
–
1.581; agb3=4.867*avgha-6.071*ce-35.559,
[0031]
拟合计算为:ln(agb3)=2.115*lnavgha
–
0.8*lnce
–
0.82;
[0032]
其中,agb1为算术平均高avgha对应的生物量,agb2为冠幅加权平均高lorcha 对应的生物量,agb2为胸径加权平均高dbha对应的生物量。
[0033]
上述方案进一步优选的,所述单木参数主要包括单木胸径、树高、枝下 高和冠幅;单木参数估算实测地的森林地上生物量分别满足如下:
[0034]wl
=0.8005
×
(d2h)
0.0697
;
[0035]
wb=0.0460
×
(d2h)
0.5644
;
[0036]ws
=0.0545
×
(d2h)
0.8337
;
[0037]
wr=0.0206
×
(d2h)
0.6730
;
[0038]wagb
=w
l
+wb+ws+wr;
[0039]
其中,w
l
、wb、ws、wr分别为单木的叶、枝、干、根的生物量;w
agb
为单木的地上生物量,d为胸径,单位为cm;h为树高,单位为m。
[0040]
本发明的优点是:本发明应用激光雷达获取单木的lidar点云数据并对 数据进行分割,可准确、有效、完整地获取单木参数,能有效地减少在森林 调查中对时间、人力及经济成本的消耗与浪费;本发明的生物量估算从实地 测量的单木参数尺度和无人机拍摄的林分样地参数尺度上进行建立回归关 系,从而快速实现整个区域森林地上生物量的估算,降低了森林地上生物量 估算成本的同时,也提升了生物量估算精度。
附图说明
[0041]
图1是本发明的一种基于无人机激光雷达单木与森林地上生物量估算方 法的流程图。
[0042]
图2是本发明的多元线性方程进行拟合优化和检验效果图。
具体实施方式
[0043]
为使本发明的目的、技术方案及优点更加清楚明白,以下参照附图并举 出优选实
施例,对本发明进一步详细说明。然而,需要说明的是,说明书中 列出的许多细节仅仅是为了使读者对发明的一个或多个方面有一个透彻的理 解,即便没有这些特定的细节也可以实现本发明的这些方面。
[0044]
本发明提出一种基于无人机激光雷达单木与森林地上生物量估算方法, 以桉树人工林作为研究区,通过野外样地调查数据以及使用低成本、灵活、 精细的无人机激光雷达技术对桉树人工林进行数据采集,通过对无人机激光 雷达数据进行处理、分析以及实现样地野外调查,以单木参数提取为核心进 行估算,最终以实现研究区森林地上生物量估算,所述估算方法包括以下步 骤:
[0045]
步骤1:对待估算区域(研究区)内所有样本地的单木进行定位,以获取每 单木的位置坐标,对实测区内所有样地的立木(单木)进行定位与量测,胸高位 置为1.3m处,以2.5cm的胸径作为起测基准。首先采用罗盘确定样地方向, 然后利用皮尺量测出样地大小,并对各样地的四个角点和中心点进行坐标定 位,最后对所有样地内的每立木进行测量。测量的单木参数主要包括单木胸 径、树高、枝下高、冠幅,其中使用钢围尺测量胸径,使用手持激光测高仪 测量树高和枝下高,采用投影法量测树冠,并借助皮尺测量出树冠投影到地 面的南北、东西方向的长度,并计算它们的平均值,即得到冠幅,利用gps 定位仪进行四个角点及每立木定位,获得样地内每单木的坐标;
[0046]
对样本地的单木进行实地测量并获取样本地的单木参数,根据单木参数 估算实测地的森林地上生物量;所述单木参数主要包括单木胸径、树高、枝 下高和冠幅,单木参数估算实测地的森林地上生物量分别满足如下;
[0047]
叶(w
l
)=0.8005
×
(d2h)
0.0697
;
[0048]
枝(wb)=0.0460
×
(d2h)
0.5644
;
[0049]
干(ws)=0.0545
×
(d2h)
0.8337
;
[0050]
根(wr)=0.0206
×
(d2h)
0.6730
;
[0051]wagb
=w
l
+wb+ws+wr;
[0052]
其中,w
l
、wb、ws、wr分别为单木的叶、枝、干、根的生物量;w
agb
为单木的地上生物量,d为胸径(单位:cm);h为树高(单位:m);
[0053]
步骤2:以实地测量样本地的单木所在位置作为参考,采用无人机激光雷 达获取待估算区域内单木的lidar点云数据,对单木的lidar点云数据进 行预处理获取样地参数;对单木的lidar点云数据进行预处理包括如下步骤:
[0054]
步骤20:lidar点云数据以las格式存储,获取所存储的lidar点云数 据,以估算区域内样本地的单木最大树高为最大值,选取13m树高为最大值, 以2m为植被点云的分割阈值为最小值,故以2m树高为最小值,将高于13m 的像元视为异常值,不参与分割;低于2m的像元不参与分割;基于chm的分 水岭分割对取样地单木lidar点云数据进行分割,获取取样地单木的点云分 割数据;
[0055]
步骤21:对取样地单木分割的点云分割数据进行高程归一化处理,其目 的是消除地形起伏对森林分布的影响,从而确保单木参数提取的准确性,再 对归一化后的点云分割数据进行栅格化处理;
[0056]
步骤22:采用中值滤波对栅格化处理的数据进行无效值填充,然后通过 高斯平滑窗口对数据进行平滑处理,获取单木的样地参数;对数据进行平滑 处理以提高chm的质量,
从而提高单木分割的准确率,采用中值滤波对点云 数据进行了优化,得到分辨率为0.2m的chm的分水岭分割图像;由于高斯 平滑窗口对数据进行平滑处理时,对chm分割结果受高斯平滑因子的影响, 高斯平滑因子越大,平滑程度高,可能出现欠分割现象,反之则出现过分割 情况,高斯平滑因子的值通常取0.5~1.5之间,本实施例的高斯平滑因子默 认为1,当高斯平滑因子越小时,分割的株数越多,反之分割的株树越少,总 体上需要使分割株数与实测株数相近;
[0057]
步骤23:根据样地参数分别计算样地单木的算术平均高avgha、冠幅加 权平均高lorcha、胸径加权平均高dbha;其中,
[0058]
avgha为单木的算术平均高;hai为单木树高;n为单 木总株数;
[0059]
lorcha为单木的冠幅加权平均高;
[0060]
ca=(π
×
ce2)/4;ca为单木冠层面积,
[0061]
ce为单木冠幅;将树冠形状看作一个的圆形,故利用圆的面积公式计算冠 幅,基于激光雷达的单木分割主要是确定树冠顶点(得到树高)和树冠边界(得 到冠幅大小),故将冠幅用于计算林分平均高,对森林地上生物量的估算具有 一定的影响,将冠幅加权平均高、算术平均高、平均冠幅与实测地上生物量 建立回归方程;
[0062]
步骤3:以实测地的森林地上生物量作为为响应变量,样地参数作为预测 变量,建立样地参数与实测地的森林地上生物量预测模型,该森林地上生物 量预测模型满足:
[0063][0064]
式中的agp
p
表示样地森林地上生物量,a
pi
表示已知样地pi的森林地上生物 量(a
pi
等同于单木参数估算实测地的森林地上生物量,由w
agb
=w
l
+wb+w
s +wr进行计算获得),k为大于等于1的样本数量,w
p,pi
为距离权重;
[0065]
其中,d
pi,p
为样本地内单木之间的空间距离;
[0066]
步骤4:采用线性拟合验证森林地上生物量预测模型,获取最优森林地上 生物量估测结果,在本发明中,采用线性拟合验证森林地上生物量预测模型 的过程包括如下过程:
[0067]
步骤40:从样地参数中选取出一个数据样本作为测试集,其余的全部数 据样本用于训练集,重复此过程,获得k组训练集和测试集,采用留一交叉 验证法(leave-one-out cross validation,loocv)依次进行训练和测试,直 到把所有数据样本被用于一次测试集,即可完成验证,最后计算k个样本数 据记录的预测误差的平均值,计算k个样本数据记录的预测误差的平均值包 括证决定系数r2、均方根误差rmse(root mean square error);以小样方(10 m
×
10m)为单位选取样地参数作为预测变量,采用点云分位数法对样地点云按 照小样方大小选取高度变量、高度百分位数、冠层密度分位数、叶面积指数 等k个(例如:选35个)样地参数,并计算其样地内所有小样方的样地参数的 平均值作为预测变量,以便构建森林地上生物量预测模型
[0068]
步骤41:将预测误差的平均值用于线性拟合实测地的森林地上生物量, 获得森林
地上生物量线性回归方程,作为森林地上生物量预测模型;所述将 预测误差的平均值用于线性拟合实测地的森林地上生物量主要采用自然对数 形式对实测地的森林地上生物量进行拟合;采用自然对数形式对实测地的森 林地上生物量进行拟合主要分别对单木的算术平均高avgha、冠幅加权平均高 lorcha和胸径加权平均高dbha对应的生物量进行拟合计算;其中,算术平均 高avgha、冠幅加权平均高lorcha、胸径加权平均高dbha对应的生物量进行 拟合计算分别满足表1
[0069]
表1:实测生物量与lidar单木分割结果的线性回归方程
[0070][0071]
其中,agb1为算术平均高avgha对应的生物量,agb2为冠幅加权平均高 lorcha对应的生物量,agb2为胸径加权平均高dbha对应的生物量;r2愈大, 表示拟合性能愈好,rmse越小,说明回归越准确,精度越高;
[0072]
步骤42:筛选预测变量并使用多元线性方程进行拟合优化,直到满足预 测变量个数最少时,得到最优的森林地上生物量预测模型;所述森林地上生 物量多元线性方程满足:
[0073]
agb=-16.324+4.134*h
p
+27.143*lai;
[0074]
其中,agb为森林地上生物量预测值,h
p
为样地参数中的预测变量的高 度百分位数,lai为叶面积指数。
[0075]
使用样地实测生物量进行多元线性方程进行拟合优化和检验,结果表明, 如图2所示,mlr回归模型r2=0.865,rmse为8.547t/ha,本发明的估算方 法对预测样地生物量具有较高精度。
[0076]
本发明通过样地实测的森林地上生物量与激光雷达数据提取的样地平均 树高、冠幅加权平均高、平均冠幅建立回归线性模型,并对模型的精度进行 验证,从而得到最优的预测模型,用于预测以单木参数为响应变量的整个实 测区的森林地上生物量,由于无法直接从激光雷达的lidar点云数据中获取 单木胸径信息,但胸径与树高、冠幅的关系密切,因此可以通过建立实测地 上生物量与样地参数(无人机获取的lidar点云数据)进行估测算术平均树 高、冠幅加权平均高以及平均冠幅的建立回归关系;基于单木参数的地上生 物量估算=采用线性回归方法估测算术平均高(avgha)自然对数形式的拟合 效果最佳(r2=0.851,rmse=0.312t/ha);基于样地参数的森林地上生物量估 算,使用筛选后的预测变量进行多元线性方程进行拟合优化,直到满足预测 变量个数最少时,得到最优的森林地上生物量预测模型,从而估算出研究区 森林地上生物量agb。
[0077]
以上所述仅是本发明的优选实施方式,并不用于限制本发明。应当指出, 对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,所做 出的若干修改、等同替换和改进等,也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1