一种测量固体颗粒物对竖井结构冲击力的方法及装置
1.本发明涉及市政排水技术领域,尤其涉及一种测量排水系统中随水流运动的固体颗粒物对竖井结构冲击力的方法及装置。
背景技术:
2.随着我国现代化建设不断深入,城市化进程逐步加快,但城市排水管网系统中存在一定比例的排水井盖处于破损、丢失状态。不透水区域面积持续增加导致地表径流不断增大,强降雨期间大流量地表径流推动大体积固体颗粒物进入排水管道系统,加大了固体颗粒对排水管道结构的冲击破坏作用,加大了竖井结构破损的风险,造成较为严重的内部污水外渗、外部地下水入流等水环境问题。污水外渗会导致周边地下水和土壤污染,甚至引发道路坍塌。
3.固体颗粒物进入排水系统后随着管道内的水流一起运动。在管道连接处,固体颗粒随水流一同冲击竖井边壁,随后一同冲击竖井底部结构。在竖井底部湍流的作用下会多次反复冲击竖井底部,直到固体颗粒物离开竖井,进入下游管道。由于固体颗粒物存在多样性,高密度及硬度的颗粒物对竖井结构的冲击将会带来更大的破坏。
4.目前行业缺乏水流携带作用下固体颗粒物对竖井结构冲击力的测量方法。水流对颗粒物的携带机制不同,导致不同体型的颗粒撞击位置及冲击力的大小不同;同时不同体型颗粒进入竖井底部水垫层时方向发生偏转,进而增加了颗粒物冲击力的测量难度。本发明采用了一种图像追踪技术与理论分析相结合的方法,可以测量随水流运动固体颗粒物对竖井结构冲击力的大小。基于颗粒物的运动轨迹识别和理论分析的方法,对非规则颗粒物的冲击过程进行理论计算,可得到固体颗粒物对竖井结构的冲击力的大小,为实际工程中竖井结构安全设计提供理论依据和参考。
5.同时在方法进行应用时,颗粒物运动对管道进行撞击和水流冲击引起振动,而高速相机通常是用螺纹连接进行固定位置,振动会逐渐将螺栓振出,高速相机安装不稳定会导致识别出的颗粒物运动轨迹发生与实际不符合,且由于水流存在会导致管道周围湿气大,会导致高速相机镜头产生雾气,影响高速相机对颗粒物运动轨迹的识别。
技术实现要素:
6.本发明为解决行业缺乏水流携带作用下固体颗粒物对竖井结构冲击力的测量方法,而提出的一种测量排水系统中随水流运动固体颗粒对竖井结构冲击力的方法。
7.为了实现上述目的,本发明采用了如下技术方案:
8.一种测量排水系统中随水流运动固体颗粒物对竖井结构冲击力的方法,包括如下步骤:
9.s1、获取上游管道内随水流运动颗粒物的速度v0;
10.s2、利用自由落体运动原理获得颗粒物进入水垫层的速度v1;
11.s3、获取颗粒物竖井结构撞击过程中的接触时间δt
p
;
12.s4、利用迭代的方式,通过图像追踪对迭代过程中颗粒物受到的阻力系数ψ进行修正,得到颗粒物在水中的速度变化过程以及颗粒物撞击竖井底部前的速度v
t
;
13.s5、获取颗粒物撞击竖井底部后的速度vd;
14.s6、利用动量定理计算颗粒物对竖井结构的冲击力。
15.优选的,所述s4中具体的迭代计算过程为:
16.a、由颗粒物进入竖井时t1的速度v1计算颗粒物受到的水流阻力ψ1大小;
17.b、确定迭代的时间步δt;
18.c、利用动量方程求出t1时刻颗粒物的加速度a1大小;
19.d、结合初始速度v1,计算t2时刻颗粒物的速度v2;
20.e、计算出t
1-t2时间段内颗粒物下降的高度h1;
21.f、重复步骤a-e,直到计算出来的距离h1,h2,
…
,hn之和为水垫层(5)深度hw,即hw=h1+h2+
···
+hn。
22.优选的,基于运动公式进行迭代计算,其中,ρw为水的密度,ρs为颗粒物的密度,g为重力加速度,v为颗粒物的体积,ψ为水流对颗粒物的阻力系数,d为颗粒物的当量直径,v为颗粒物的速度。
23.一种测量固体颗粒物对竖井结构冲击力的装置,包括高速相机组,所述高速相机组安装在竖井结构内,竖井结构包括上游管道、竖井、下游管道和基座,所述上游管道、竖井、下游管道依次连接,所述竖井顶部通过进气口与大气相通,竖井底部设置水垫层;
24.所述上游管道的正前方设有第一高速相机,所述下游管道正前方设有第二高速相机,所述竖井底部水垫层正前方设有第三高速相机,所述第一高速相机、第二高速相机和第三高速相机形成高速相机组;
25.所述第一高速相机用于获取上游管道内随水流运动颗粒物的速度;
26.所述第二高速相机用于获取颗粒物撞击竖井底部后的速度;
27.所述第三高速相机用于获取颗粒物竖井结构撞击过程中的接触时间。
28.优选的,所述基座的顶部放置有第三高速相机,所述第三高速相机的采集频率需达到帧/秒以上,所述第三高速相机的背面抵接有连接盘;
29.所述基座的顶部设置有防振安装组件,所述防振安装组件避免振动对第三高速相机造成影响;
30.所述防振安装组件的顶部设置有引导组件,所述引导组件对第三高速相机工作时所产生的热量进行引导。
31.优选的,所述防振安装组件包括固定板夹,所述固定板夹的侧壁且靠近顶部处开设有穿孔,所述穿孔的内壁插接有圆棍,所述圆棍的左端固定安装有圆盘,所述圆棍的右端固定安装有圆柱,所述圆柱的上下两侧均固定安装有弧形金属板,所述弧形金属板靠近圆柱的一侧开设有滑轨,所述弧形金属板的表面且位于滑轨处滑动连接有滑球,所述滑球的左端固定安装有连接杆,所述连接杆远离滑球的一端固定安装有插杆,所述插杆远离圆柱的一端固定安装有卡板,所述圆柱的右端固定安装有对接块,所述对接块的表面与固定块
插接。
32.优选的,所述引导组件包括牵引管,所述牵引管的内壁固定安装有支撑块,所述牵引管的表面转动连接有棘轮,所述棘轮的轴心处转动连接有支撑板,所述支撑板远离棘轮的一侧且位于棘轮轴心垂直线处转动连接有扇叶,所述棘轮的底部啮合连接有韧性金属片,所述韧性金属片的底部固定安装有振动块,所述振动块的左右两侧均固定安装有长程弹簧。
33.优选的,所述固定板夹的底部与基座铰接,所述固定板夹设有两个,且关于第三高速相机中心轴对称,所述圆柱靠近插杆的一侧开设有圆孔,所述插杆与圆孔滑动连接,所述对接块的横截面为凸字状,所述固定块的底部与固定板夹固定连接。
34.优选的,所述牵引管分为三段,所述牵引管之间的连接处与棘轮转动连接,所述支撑板的直径上设有连接板,所述连接板弧度与扇叶叶面弧度相同,所述振动块的底部与支撑块滑动连接,所述连接盘抵接在第三高速相机的散热口位置,所述支撑块与第三高速相机交错放置。
35.与现有技术相比,本发明提供了一种测量固体颗粒物对竖井结构冲击力的方法及装置,具备以下有益效果:
36.(1)本发明对于形状不规则的颗粒物,基于图像追踪技术获取颗粒物的运动轨迹,进而对颗粒物受到的阻力系数进行修正;获得撞击前后的速度及接触时间,利用动量方程可计算得到颗粒物对竖井结构冲击力的大小。本发明可准确测量排水管道中固体颗粒物对竖井结构的冲击作用,对城市排水管道的安全运营及维护城市水环境具有重大意义。
37.(2)本发明中基座的顶部设有防振安装组件,弧形金属板本身韧性,振动会使得弧形金属板同向移动不会同时贴合圆柱,采用上述结构,解决了振动导致的安装不稳定,导致相机识别颗粒物轨迹不准确的问题。
38.(3)本发明中防振安装组件的顶部设有引导组件,振动块左右振动并利用韧性金属片带动棘轮旋转,以至于扇叶单向旋转,扇叶旋转牵引热量直吹第三高速相机的镜头,采用上述结构,解决了水流流动湿气大导致镜头出现水雾无法清晰拍摄的问题。
附图说明
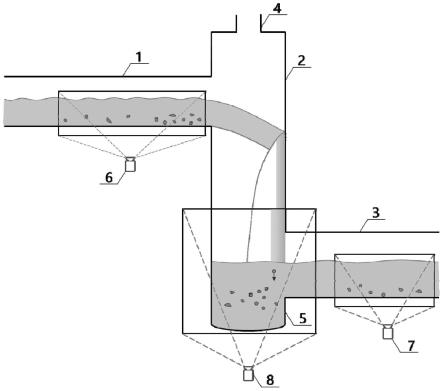
39.图1为本发明提出的常规排水竖井示意图;
40.图2为本发明提出的高速相机观测位置;
41.图3为本发明提出的不规则颗粒物在水中的运动轨迹图;
42.图4为本发明提出的颗粒物高度及速度变化图。
43.图5为本发明提出的校正后迭代颗粒物冲击末速度与实测末速度的对比图。
44.图6为本发明提出的颗粒物冲击力的测量结果图。
45.图7为本发明提出的基座结构的示意图。
46.图8为本发明提出的连接盘结构的示意图。
47.图9为本发明提出的固定板夹结构的示意图。
48.图10为本发明提出的弧形金属板结构的示意图。
49.图11为本发明提出的弧形金属板结构的示意图。
50.图12为本发明提出的振动块结构的示意图。
51.图号说明:
52.1、上游管道;2、竖井;3、下游管道;4、进气口;5、水垫层;6、第一高速相机;7、第二高速相机;8、第三高速相机;9、基座;10、连接盘;11、防振安装组件;1101、固定板夹;1102、穿孔;1103、圆棍;1104、圆盘;1105、圆柱;1106、弧形金属板;1107、滑轨;1108、滑球;1109、连接杆;1110、插杆;1111、卡板;1112、对接块;1113、固定块;12、引导组件;1201、牵引管;1202、支撑块;1203、棘轮;1204、支撑板;1205、扇叶;1206、韧性金属片;1207、振动块;1208、长程弹簧。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
54.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
55.实施例1:
56.请参阅图1-3,一种测量排水系统中随水流运动固体颗粒物对竖井结构冲击力的方法,包括如下步骤:
57.s1、获取上游管道1内随水流运动颗粒物的速度v0;
58.s2、利用自由落体运动原理获得颗粒物进入水垫层5的速度v1;
59.s3、获取颗粒物竖井结构撞击过程中的接触时间δt
p
;
60.s4、利用迭代的方式,通过图像追踪对迭代过程中颗粒物受到的阻力系数ψ进行修正,得到颗粒物在水中的速度变化过程以及颗粒物撞击竖井2底部前的速度v
t
;
61.基于运动公式进行迭代计算,其中,ρw为水的密度,ρs为颗粒物的密度,g为重力加速度,v为颗粒物的体积,ψ为水流对颗粒物的阻力系数,d为颗粒物的当量直径,v为颗粒物的速度;
62.具体的迭代计算过程为:
63.a、由颗粒物进入竖井(2)时t1的速度v1计算颗粒物受到的水流阻力ψ1大小;
64.b、确定迭代的时间步δt;
65.c、利用动量方程求出t1时刻颗粒物的加速度a1大小;
66.d、结合初始速度v1,计算t2时刻颗粒物的速度v2;
67.e、计算出t
1-t2时间段内颗粒物下降的高度h1;
68.f、重复步骤a-e,直到计算出来的距离h1,h2,
…
,hn之和为水垫层(5)深度hw,即hw=h1+h2+
···
+hn。
69.s5、获取颗粒物撞击竖井2底部后的速度vd;
70.s6、利用动量定理计算颗粒物对竖井(2)结构的冲击力。
71.由于不规则颗粒物在冲击竖井2侧壁的过程中会发生脱离水流现象,并且在冲击竖井2底部水垫层5的过程中发生角度偏转现象概率大,使得颗粒物冲击竖井2底部遍布各个地方。因此,采用第三高速相机8追踪拍摄竖井2底部内颗粒物的运动过程,具体的观测位置如图2所示。其中,第一高速相机6观测上游管道1中颗粒物的运动过程,以追踪颗粒物的水平速度v0;第三高速相机8观测颗粒物在竖井2底部水垫层5中的运动过程,获取颗粒物撞击过程中与竖井2底板的接触时间δt
p
。
72.固体颗粒物在撞击竖井2底部的那一时刻,固体颗粒物除自身重力外,还受到浮力、流体阻力以及竖井2底部对它的反冲力。但是重力、浮力和流体阻力相对较小,可以忽略不计。利用高速相机组追踪颗粒物运动轨迹,进行逐一图片分析,记录移动时间并测量移动距离。利用颗粒物在水中的动量方程得到的公式进行迭代,通过图像追踪对迭代过程中颗粒物受到的阻力系数ψ进行修正,可得到颗粒物在水中的速度变化过程以及到到达底部时的最终速度v
t
。测量计算求得颗粒物冲击竖井2底部后速度。根据动量定理即可求出竖井2底部对颗粒物的反冲力。由作用力与反作用力,即可得出颗粒物冲击力。观测计算所得数据,维护竖井2安全稳定运行。
73.实施例2:
74.一种测量固体颗粒物对竖井结构冲击力的装置,包括高速相机组,高速相机组安装在竖井结构内,竖井结构包括上游管道1、竖井2、下游管道3和基座9,上游管道1、竖井2、下游管道3依次连接,竖井2顶部通过进气口4与大气相通,竖井2底部设置水垫层5;
75.上游管道1的正前方设有第一高速相机6,下游管道3正前方设有第二高速相机7,竖井2底部水垫层5正前方设有第三高速相机8,第一高速相机6、第二高速相机7和第三高速相机8形成高速相机组;
76.第一高速相机6用于获取上游管道1内随水流运动颗粒物的速度;
77.第二高速相机7用于获取颗粒物撞击竖井2底部后的速度;
78.第三高速相机8用于获取颗粒物竖井结构撞击过程中的接触时间;第三高速相机8的采集频率需达到10000帧/秒以上。
79.某排水管道颗粒物冲击的物理实验模型主要包括以下部分:上游管道1的长度为3.0m,直径为0.3m;下游管道3为水平管道,长度为3.0m,直径为0.4m;竖井2连接上下游管道,直径为0.4m,高度为2.8m;竖井2顶部设置进气口,直径为0.1m。水流由上游管道1流入竖井2,经竖井2进入下游管道3。基于实施例1中测量方法,利用第三高速相机8追踪到的直径为20mm的玻璃球颗粒物在深度为0.5m的水垫层5中的运动过程以及基于迭代过程得到的高度及速度变化过程。在固体颗粒物进入水垫层5时,由自由落体计算得到颗粒物的速度为6.7m/s。进入水垫层5以后,受到了浮力、重力以及水流阻力的作用。通过图像追中颗粒物的运动轨迹分析,可得到颗粒物受到的阻力系数随着速度的减小而缓慢增大。校正迭代后的颗粒物冲击末速度与实测末速度的对。
80.请参阅图5,颗粒物受到的水流阻力随着颗粒物的速度增大而增加。在颗粒物到达竖井2底部时颗粒物的最终速度约为1.2m/s,反弹后的颗粒物的速度约为0.9m/s,撞击的接
触时间为0.5s。因此可测量得到颗粒物对竖井2底部的冲击力大小为47.1n。
81.请参阅图6,不同直径的颗粒物在深度分别为0.2-0.5m的水垫层5中对竖井2底部的冲击力大小。在竖井2底部各个水垫层5水深下,随着水垫层5深度的增加,同一大小玻璃球颗粒物对竖井2底部的冲击力越小。在0.5m水深下,20mm玻璃球最高冲击力可达42.3n。在同一个竖井2的水垫层5深度下,随着玻璃球颗粒物直径的增大,玻璃球颗粒物对竖井2底部的冲击力越大,直径为20mm的颗粒物在0.2m深的水垫层5中对竖井2结构的冲击力为209.1n。
82.实施例3
83.与实施例2不同之处在于,一种测量固体颗粒物对竖井结构冲击力的装置还包括基座9,基座9的顶部放置有第三高速相机8,第三高速相机8的背面抵接有连接盘10;
84.基座9的顶部设置有防振安装组件11,防振安装组件11避免振动对第三高速相机8造成影响;
85.防振安装组件11的顶部设置有引导组件12,引导组件12对第三高速相机8工作时所产生的热量进行引导。
86.请参阅7-11,防振安装组件11包括固定板夹1101,固定板夹1101的侧壁且靠近顶部处开设有穿孔1102,穿孔1102的内壁插接有圆棍1103,圆棍1103的左端固定安装有圆盘1104,圆棍1103的右端固定安装有圆柱1105,圆柱1105的上下两侧均固定安装有弧形金属板1106,弧形金属板1106靠近圆柱1105的一侧开设有滑轨1107,弧形金属板1106的表面且位于滑轨1107处滑动连接有滑球1108,滑球1108的左端固定安装有连接杆1109,连接杆1109远离滑球1108的一端固定安装有插杆1110,插杆1110远离圆柱1105的一端固定安装有卡板1111,圆柱1105的右端固定安装有对接块1112,对接块1112的表面与固定块1113插接。
87.本发明中基座9的顶部设有防振安装组件11,利用固定板夹1101将第三高速相机8的位置固定,随后将对接块1112从圆棍1103的位置向固定块1113的位置插入弧形金属板1106收到圆棍1103的挤压向圆柱1105的方向移动,弧形金属板1106利用滑轨1107带动滑球1108移动,以至于连接杆1109和插杆1110向圆柱1105的方向移动,插杆1110插入圆柱1105内部使得卡板1111与圆柱1105贴合,此时卡板1111能够穿过圆棍1103,随后弧形金属板1106不再收到挤压,以至于卡板1111复位,此时圆盘1104和卡板1111将固定板夹1101的位置固定,同时对接块1112插入固定块1113进行辅助扶持,即使有颗粒物撞击管道以及水流冲击管道引发振动,由于弧形金属板1106本身韧性,振动会使得弧形金属板1106同向移动不会同时贴合圆柱1105,故安装稳定,将圆柱1105上下两侧的弧形金属板1106同步向圆柱1105的方向压合,即可分离,采用上述结构,解决了振动导致的安装不稳定,导致相机识别颗粒物轨迹不准确的问题。
88.实施例4
89.与实施例3不同之处在于,请参阅图8和12,引导组件12包括牵引管1201,牵引管1201的内壁固定安装有支撑块1202,牵引管1201的表面转动连接有棘轮1203,棘轮1203的轴心处转动连接有支撑板1204,支撑板1204远离棘轮1203的一侧且位于棘轮1203轴心垂直线处转动连接有扇叶1205,棘轮1203的底部啮合连接有韧性金属片1206,韧性金属片1206的底部固定安装有振动块1207,振动块1207的左右两侧均固定安装有长程弹簧1208。
90.牵引管1201分为三段,牵引管1201之间的连接处与棘轮1203转动连接,支撑板
1204的直径上设有连接板,连接板弧度与扇叶1205叶面弧度相同,振动块1207的底部与支撑块1202滑动连接,连接盘10抵接在第三高速相机8的散热口位置,支撑块1202与第三高速相机8交错放置。
91.本发明中防振安装组件11的顶部设有引导组件12,连接盘10与第三高速相机8的散热口对接,第三高速相机8持续工作会产生热量,热量从散热口散发而出,连接盘10将热量聚集,同时由于颗粒物撞击管道以及水流冲击管道引发振动,振动块1207压缩长程弹簧1208进行左右振动,振动块1207左右振动并利用韧性金属片1206带动棘轮1203旋转,振动块1207与棘轮1203配合,振动块1207向右移动时能够带动棘轮1203旋转,振动块1207向左移动时,韧性金属片1206会棘轮1203的齿牙向下压动,故棘轮1203进行单向旋转,使得扇叶1205持续转动,牵引管1201对从连接盘10而来的热量进行引导,扇叶1205旋转牵引热量直吹第三高速相机8的镜头,采用上述结构,解决了水流流动湿气大导致镜头出现水雾无法清晰拍摄的问题。
92.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1