一种人体联动方法、装置、设备及存储介质与流程
本技术涉及人机交互,尤其涉及一种人体联动方法、装置、设备及存储介质。
背景技术:
1、为了提高vr/ar虚实结合的沉浸感,提高用户体验度,人机交互必不可少。目前的人体动作识别大多都停留在一些简单常规的动作操作上面,比如人体动作展示、人体动作控制展示特效等简单操作。但在vr或ar游戏场景下,上述人体动作识别的精度与稳定性已经不能满足用户对沉浸感的需求。因此,如何实时准确的还原真实人体动作,实现真实人体与虚拟人体的高质量联动,成为亟需解决的问题。
技术实现思路
1、有鉴于此,本技术提供了一种人体联动方法、装置、设备及存储介质,根据虚拟人体模型的初始姿态以及真实人体的人体姿态,来调整虚拟人体模型,使得虚拟人体模型与真实人体的姿态以及动作保持一致,同时根据缩放比例来展示虚拟人体模型。以实现真实人体与虚拟人体模型的联动。
2、本技术实施例第一方面提供了一种人体联动方法,该方法包括:
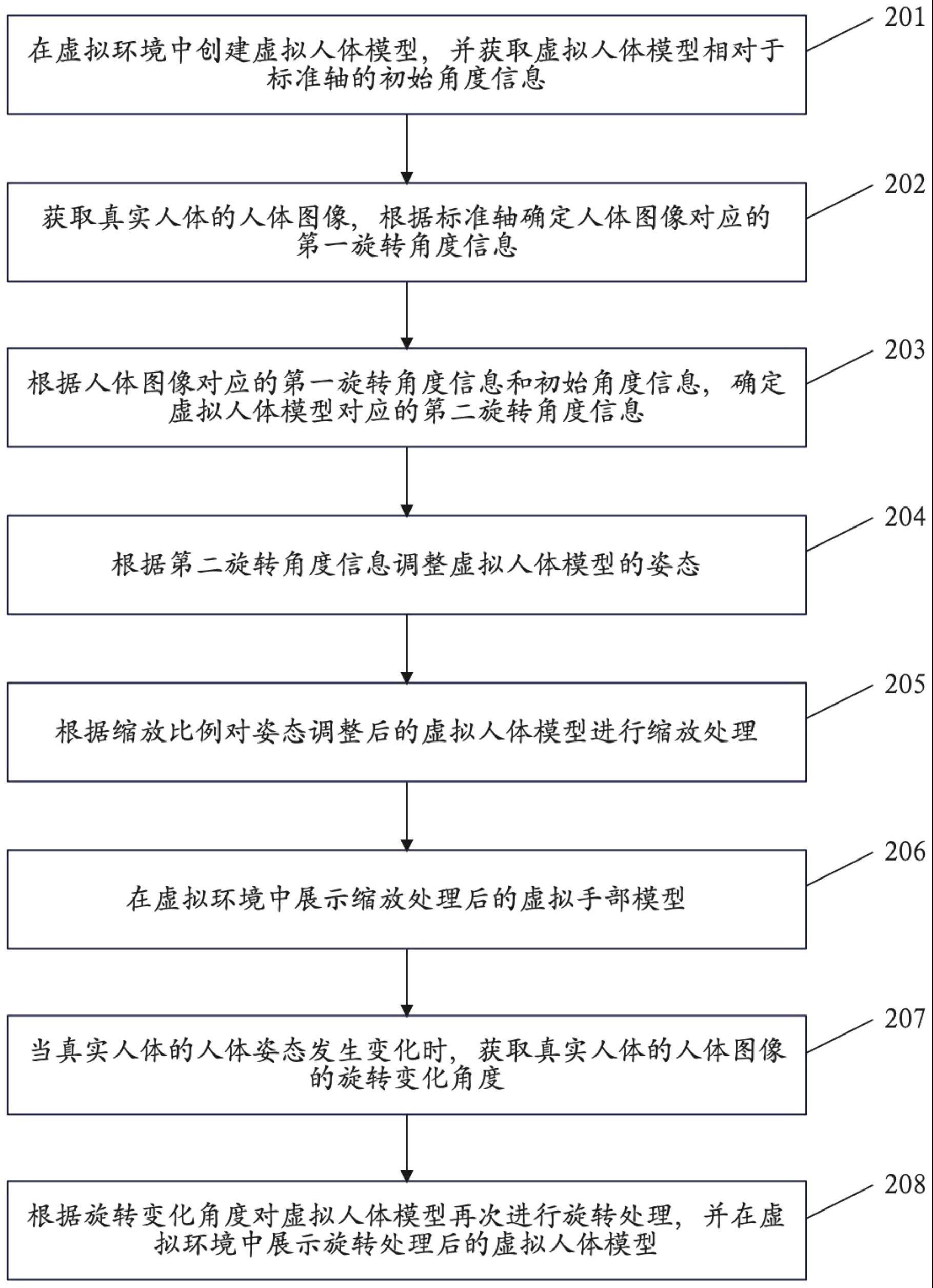
3、在虚拟环境中创建虚拟人体模型,并获取虚拟人体模型相对于标准轴的初始角度信息。其中,虚拟环境对应标准轴。
4、获取真实人体的人体图像,根据标准轴确定人体图像对应的第一旋转角度信息。
5、根据人体图像对应的第一旋转角度信息和初始角度信息,确定虚拟人体模型对应的第二旋转角度信息。
6、根据第二旋转角度信息,调整虚拟人体模型的姿态。
7、根据缩放比例对姿态调整后的虚拟人体模型进行缩放处理,并在虚拟环境中展示缩放处理后的虚拟人体模型。
8、在一个可选的实施方式中,该方法还包括:
9、获取虚拟人体模型中预设区域的初始虚拟长度。
10、根据预设区域的初始虚拟长度,确定预设区域的参考长度。
11、获取人体图像中的预设区域的当前真实长度。
12、根据当前真实长度和参考长度,确定缩放比例。
13、在一个可选的实施方式中,该方法还包括:
14、当真实人体的人体姿态发生变化时,获取真实人体的人体图像的旋转变化角度。
15、根据旋转变化角度对虚拟人体模型再次进行姿态调整。
16、在一个可选的实施方式中,该方法还包括:
17、获取真实人体的人体图像的长度变化量。
18、根据人体图像的长度变化量调整缩放比例。
19、根据调整后的缩放比例对姿态调整后的虚拟人体模型再次进行缩放处理。
20、在虚拟环境中展示缩放处理后的虚拟人体模型。
21、在一个可选的实施方式中,虚拟人体模型包括多个虚拟人体特征点,真实人体包括多个人体特征点。多个虚拟人体特征点和多个人体特征点一一对应。获取虚拟人体模型相对于标准轴的初始角度信息,包括:
22、根据多个虚拟人体特征点确定多个初始虚拟身体向量。
23、针对多个初始虚拟身体向量中每个初始虚拟身体向量,获取每个初始虚拟身体向量与标准轴对应的向量之间的向量夹角。
24、将每个初始虚拟身体向量对应的向量夹角确定每个初始虚拟身体向量对应的初始角度。
25、在一个可选的实施方式中,根据标准轴确定人体图像对应的第一旋转角度信息,包括:
26、根据多个人体特征点确定多个初始身体向量。
27、针对多个初始身体向量中每个初始身体向量,获取每个初始身体向量与标准轴对应的向量之间的向量夹角。
28、根据每个初始身体向量对应的向量夹角确定每个初始身体向量对应的第一旋转角度。
29、在一个可选的实施方式中,根据人体图像对应的第一旋转角度信息和初始角度信息,确定虚拟人体模型对应的第二旋转角度信息,包括:
30、确定每个初始虚拟身体向量对应的初始身体向量。
31、根据每个初始虚拟身体向量对应的初始角度和初始身体向量对应的第一旋转角度,确定初始虚拟身体向量对应的第二旋转角度。
32、在一个可选的实施方式中,多个人体特征点包括头部特征点、左臂特征点、躯干特征点、右臂特征点、左腿特征点及右腿特征点。根据多个人体特征点确定多个初始身体向量,包括:
33、根据多个所述头部特征点确定第一初始身体向量。
34、根据多个所述左臂特征点确定多个第二初始身体向量。
35、根据多个所述躯干特征点确定第三初始身体向量。
36、根据多个所述右臂特征点确定多个第四初始身体向量。
37、根据多个所述左腿特征点确定多个第五初始身体向量。
38、根据多个所述右腿特征点确定多个第六初始身体向量。
39、在一个可选的实施方式中,该方法还包括:
40、获取虚拟环境对应的预设参考位置。
41、确定虚拟人体模型与预设参考位置之间的初始距离,并确定真实人体的人体图像与预设参考位置之间的相对距离。
42、根据初始距离和相对距离,确定虚拟人体模型对应的位移变化量。
43、根据位移变化量更新虚拟人体模型在虚拟环境中的显示位置。
44、在一个可选的实施方式中,确定虚拟人体模型与预设参考位置之间的初始距离,包括:
45、确定虚拟人体模型中的目标虚拟人体特征点的位置。
46、确定目标虚拟人体特征点与预设参考位置之间的初始距离。
47、确定真实人体的人体图像与预设参考位置之间的相对距离,包括:
48、确定真实人体的人体图像中的目标人体特征点的位置,目标虚拟人体特征点与目标人体特征点对应。
49、确定目标人体特征点与预设参考位置之间的相对距离。
50、本技术实施例第二方面提供了一种人体联动装置,该装置包括:
51、建立单元,用于在虚拟环境中创建虚拟人体模型。
52、获取单元,用于获取虚拟人体模型相对于标准轴的初始角度信息,其中,虚拟环境对应标准轴。
53、获取单元,还用于获取真实人体的人体图像。
54、确定单元,用于根据标准轴确定人体图像对应的第一旋转角度信息。
55、确定单元,还用于根据人体图像对应的第一旋转角度信息和初始角度信息,确定虚拟人体模型对应的第二旋转角度信息。
56、处理单元,用于根据第二旋转角度信息,调整虚拟人体模型的姿态,根据缩放比例对姿态调整后的虚拟人体模型进行缩放处理。
57、展示单元,用于在虚拟环境中展示缩放处理后的虚拟人体模型。
58、在一个可选的实施方式中,获取单元,还用于获取虚拟人体模型中预设区域的初始虚拟长度。
59、确定单元,还用于根据预设区域的初始虚拟长度,确定预设区域的参考长度。
60、获取单元,还用于获取人体图像中的预设区域的当前真实长度。
61、确定单元,还用于根据当前真实长度和参考长度,确定缩放比例。
62、在一个可选的实施方式中,获取单元,还用于当真实人体的人体姿态发生变化时,获取真实人体的人体图像的旋转变化角度。
63、处理单元,还用于根据旋转变化角度对虚拟人体模型再次进行姿态调整。
64、在一个可选的实施方式中,获取单元,还用于获取真实人体的人体图像的长度变化量。
65、确定单元,还用于根据人体图像的长度变化量调整缩放比例。
66、处理单元,还用于根据调整后的缩放比例对姿态调整后的虚拟人体模型再次进行缩放处理。
67、展示单元,具体用于在虚拟环境中展示缩放处理后的虚拟人体模型。
68、在一个可选的实施方式中,虚拟人体模型包括多个虚拟人体特征点,真实人体包括多个人体特征点。多个虚拟人体特征点和多个人体特征点一一对应。
69、确定单元,还用于根据多个虚拟人体特征点确定多个初始虚拟身体向量。
70、获取单元,具体用于针对多个初始虚拟身体向量中每个初始虚拟身体向量,获取每个初始虚拟身体向量与标准轴对应的向量之间的向量夹角。将每个初始虚拟身体向量对应的向量夹角确定每个初始虚拟身体向量对应的初始角度。
71、在一个可选的实施方式中,确定单元,具体用于根据多个人体特征点确定多个初始身体向量。针对多个初始身体向量中每个初始身体向量,获取每个初始身体向量与标准轴对应的向量之间的向量夹角。根据每个初始身体向量对应的向量夹角确定每个初始身体向量对应的第一旋转角度。
72、在一个可选的实施方式中,确定单元,具体用于确定每个初始虚拟身体向量对应的初始身体向量。根据每个初始虚拟身体向量对应的初始角度和初始身体向量对应的第一旋转角度,确定初始虚拟身体向量对应的第二旋转角度。
73、在一个可选的实施方式中,多个人体特征点包括头部特征点、左臂特征点、躯干特征点、右臂特征点、左腿特征点及右腿特征点。确定单元,具体用于根据多个所述头部特征点确定第一初始身体向量。根据多个所述左臂特征点确定多个第二初始身体向量。根据多个所述躯干特征点确定第三初始身体向量。根据多个所述右臂特征点确定多个第四初始身体向量。根据多个所述左腿特征点确定多个第五初始身体向量。根据多个所述右腿特征点确定多个第六初始身体向量。
74、在一个可选的实施方式中,获取单元,还用于获取虚拟环境对应的预设参考位置。
75、确定单元,还用于确定虚拟人体模型与预设参考位置之间的初始距离,并确定真实人体的人体图像与预设参考位置之间的相对距离。根据初始距离和相对距离,确定虚拟人体模型对应的位移变化量。
76、展示单元,还用于根据位移变化量更新虚拟人体模型在虚拟环境中的显示位置。
77、在一个可选的实施方式中,确定单元,具体用于确定虚拟人体模型中的目标虚拟人体特征点的位置。确定目标虚拟人体特征点与预设参考位置之间的初始距离。确定真实人体的人体图像中的目标人体特征点的位置,目标虚拟人体特征点与目标人体特征点对应。确定目标人体特征点与预设参考位置之间的相对距离。
78、本技术实施例第三方面还提供了一种服务器,包括:存储器和处理器,存储器和处理器耦合。
79、其中,存储器用于存储一条或多条计算机指令。
80、处理器用于执行一条或多条计算机指令,以实现上述第一方面所述的人体联动方法。
81、本技术实施例第四方面还提供了一种计算机可读存储介质,其上存储有一条或多条计算机指令,其特征在于,该指令被处理器执行以实现上述任意一种技术方案所述的人体联动方法。
82、在本技术实施例所提供的技术方案中,首先在虚拟环境中建立虚拟人体模型,然后基于规定的标准轴,确定虚拟人体模型相对于该标准轴的初始角度。接着获取待还原的真实人体的人体姿态,又基于该规定的标准轴获取真实人体相对于该标准轴的旋转角度。接着根据真实人体对应的旋转角度以及虚拟人体模型对应的初始角度,来调整虚拟人体模型的角度。最后,根据缩放比例来确定要展示的虚拟人体模型的大小,在虚拟环境中展示与真实人体姿态一致的虚拟人体。上述实施例利用标准轴来衡量虚拟人体模型的初始姿态以及真实人体的实时人体姿态,然后根据真实人体的人体姿态与虚拟人体模型的初始姿态之间的姿态差异来调整虚拟人体模型。这样,无需对虚拟人体模型的初始姿态进行强制规定,对任何姿态的真实人体都能进行快速高精度的还原。实现真实人体与虚拟人体的实时联动,提高人体联动的效率。
- 还没有人留言评论。精彩留言会获得点赞!