快件分离方法及装置与流程
本技术主要涉及物流,具体涉及一种快件分离方法及装置。
背景技术:
1、在物流分拣领域,用工短缺、人力成本高昂问题日趋明显,无人化分拣已成为趋势。无人化分拣系统中,形状规则且大小适中的快件经过单件分离、摆轮和供件台,可以轻松通过皮带运送到交叉带小车上完成分拣。但是,在无人化分拣系统中,由于快件形状各异且大小不一,交叉带在分拣异形件和超尺寸件(下面统称为异常件)时容易产生飘件或卡件,造成分拣异常,严重时会损坏分拣设备,给无人化分拣带来难题。现有技术中识别异常件主要是依靠人工观察或者通过快件的点云数据进行异常件识别然后剔除,这些方法的效率都比较低。
2、也即,现有技术中快件分离的效率较低。
技术实现思路
1、本技术提供一种快件分离方法及装置,旨在解决现有技术中快件分离的效率较低的问题。
2、第一方面,本技术提供一种快件分离方法,所述快件分离方法应用于快件分离系统,所述快件分离系统包括摆轮装置和位于所述摆轮装置上方的深度相机,所述摆轮装置的输送面用于输送快件,所述快件分离方法包括:
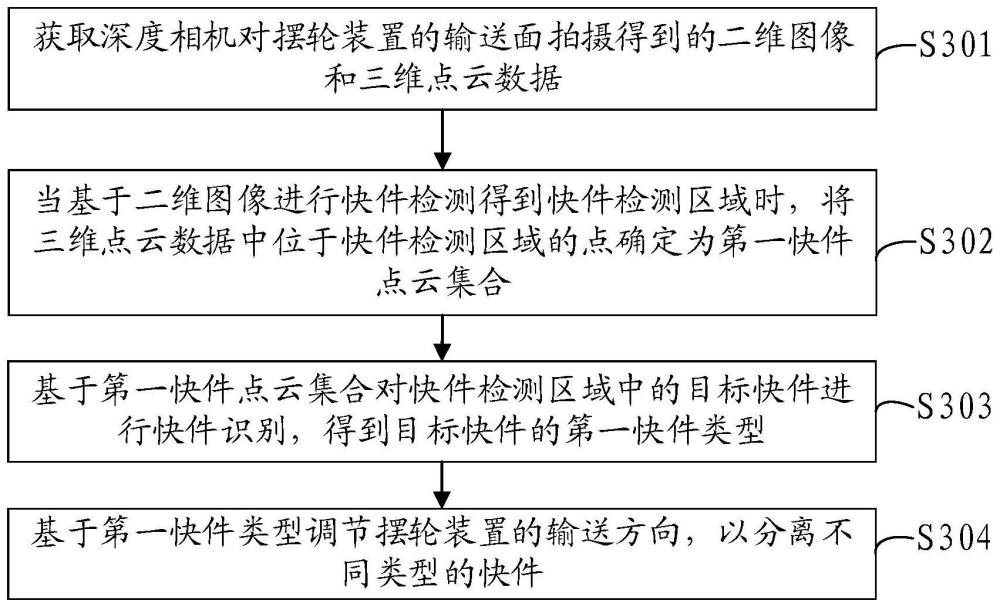
3、获取深度相机对所述摆轮装置的输送面拍摄得到的二维图像和三维点云数据;
4、当基于所述二维图像进行快件检测得到快件检测区域时,将所述三维点云数据中位于所述快件检测区域的点确定为第一快件点云集合;
5、基于所述第一快件点云集合对所述快件检测区域中的目标快件进行快件识别,得到所述目标快件的第一快件类型;
6、基于所述第一快件类型调节摆轮装置的输送方向,以分离不同类型的快件。
7、可选地,所述深度相机的光轴垂直于所述摆轮装置的输送面;所述深度相机的拍摄界面中标注有位于所述摆轮装置的输送面内的背景面区域,所述背景面区域的边缘与摆轮装置的输送面的边缘对齐,所述背景面区域小于所述深度相机的拍摄界面,
8、所述基于所述第一快件点云集合对所述快件检测区域中的目标快件进行快件识别,得到所述目标快件的第一快件类型,包括:
9、将所述三维点云数据位于所述背景面区域内且位于所述快件检测区域之外的点确定为背景面点云集合;
10、将所述第一快件点云集合中在深度相机的相机坐标系下竖轴坐标大于目标竖轴坐标的点剔除,得到第二快件点云集合,其中,所述目标竖轴坐标为背景面点云集合中点的最小竖轴坐标;
11、基于所述第二快件点云集合对所述目标快件进行快件识别,得到所述目标快件的第一快件类型。
12、可选地,所述基于所述第二快件点云集合对所述目标快件进行快件识别,得到所述目标快件的第一快件类型,包括:
13、计算所述第二快件点云集合中各个点在竖轴方向上的特征值;
14、将所述第二快件点云集合中竖轴方向上的特征值小于预设值的点剔除,得到第三快件点云集合;
15、基于所述第三快件点云集合对所述目标快件进行快件识别,得到所述目标快件的第一快件类型。
16、可选地,所述基于所述第一快件点云集合对所述快件检测区域中的目标快件进行快件识别,得到所述目标快件的第一快件类型,包括:
17、基于所述第一快件点云集合确定所述目标快件的尺寸信息和/或形状信息;
18、基于所述目标快件的尺寸信息和/或形状信息确定所述目标快件的第一快件类型。
19、可选地,所述基于所述第一快件点云集合确定所述目标快件的尺寸信息和/或形状信息,包括:
20、对所述第一快件点云集合进行聚类,得到多个点云簇;
21、基于多个点云簇中点数量最多的目标点云簇确定所述目标快件的尺寸信息和/或形状信息。
22、可选地,所述基于所述第一快件类型调节摆轮装置的输送方向,以分离不同类型的快件,包括:
23、按预设频率控制所述深度相机对所述摆轮装置的输送面进行拍照,得到所述目标快件对应的多个二维图像和多个三维点云数据;
24、根据多个二维图像和多个三维点云数据确定所述目标快件对应的多个第一快件类型;
25、将多个第一快件类型中频数最高的第一快件类型确定为所述目标快件的第二快件类型;
26、基于所述第二快件类型调节摆轮装置的输送方向,以分离不同类型的快件。
27、可选地,所述基于所述第一快件点云集合对所述快件检测区域中的目标快件进行快件识别,得到所述目标快件的第一快件类型,包括:
28、对所述第一快件点云集合进行体素滤波,得到滤波后的第一快件点云集合;
29、对滤波后的第一快件点云集合进行离群点剔除,得到离群点剔除后的第一快件点云集合;
30、基于离群点剔除后的第一快件点云集合对所述目标快件进行快件识别,得到所述目标快件的第一快件类型。
31、第二方面,本技术提供一种快件分离装置,所述快件分离装置应用于快件分离系统,所述快件分离系统包括摆轮装置和位于所述摆轮装置上方的深度相机,所述摆轮装置的输送面用于输送快件,所述快件分离装置包括:
32、获取单元,用于获取深度相机对所述摆轮装置的输送面拍摄得到的二维图像和三维点云数据;
33、确定单元,用于当基于所述二维图像进行快件检测得到快件检测区域时,将所述三维点云数据中位于所述快件检测区域的点确定为第一快件点云集合;
34、快件识别单元,用于基于所述第一快件点云集合对所述快件检测区域中的目标快件进行快件识别,得到所述目标快件的第一快件类型;
35、快件分类单元,用于基于所述第一快件类型调节摆轮装置的输送方向,以分离不同类型的快件。
36、可选地,所述深度相机的光轴垂直于所述摆轮装置的输送面;所述深度相机的拍摄界面中标注有位于所述摆轮装置的输送面内的背景面区域,所述背景面区域的边缘与摆轮装置的输送面的边缘对齐,所述背景面区域小于所述深度相机的拍摄界面,
37、所述快件识别单元,用于:
38、将所述三维点云数据位于所述背景面区域内且位于所述快件检测区域之外的点确定为背景面点云集合;
39、将所述第一快件点云集合中在深度相机的相机坐标系下竖轴坐标大于目标竖轴坐标的点剔除,得到第二快件点云集合,其中,所述目标竖轴坐标为背景面点云集合中点的最小竖轴坐标;
40、基于所述第二快件点云集合对所述目标快件进行快件识别,得到所述目标快件的第一快件类型。
41、可选地,所述快件识别单元,用于:
42、计算所述第二快件点云集合中各个点在竖轴方向上的特征值;
43、将所述第二快件点云集合中竖轴方向上的特征值小于预设值的点剔除,得到第三快件点云集合;
44、基于所述第三快件点云集合对所述目标快件进行快件识别,得到所述目标快件的第一快件类型。
45、可选地,所述快件识别单元,用于:
46、基于所述第一快件点云集合确定所述目标快件的尺寸信息和/或形状信息;
47、基于所述目标快件的尺寸信息和/或形状信息确定所述目标快件的第一快件类型。
48、可选地,所述快件识别单元,用于:
49、对所述第一快件点云集合进行聚类,得到多个点云簇;
50、基于多个点云簇中点数量最多的目标点云簇确定所述目标快件的尺寸信息和/或形状信息。
51、可选地,所述快件分类单元,用于:
52、按预设频率控制所述深度相机对所述摆轮装置的输送面进行拍照,得到所述目标快件对应的多个二维图像和多个三维点云数据;
53、根据多个二维图像和多个三维点云数据确定所述目标快件对应的多个第一快件类型;
54、将多个第一快件类型中频数最高的第一快件类型确定为所述目标快件的第二快件类型;
55、基于所述第二快件类型调节摆轮装置的输送方向,以分离不同类型的快件。
56、可选地,所述快件识别单元,用于:
57、对所述第一快件点云集合进行体素滤波,得到滤波后的第一快件点云集合;
58、对滤波后的第一快件点云集合进行离群点剔除,得到离群点剔除后的第一快件点云集合;
59、基于离群点剔除后的第一快件点云集合对所述目标快件进行快件识别,得到所述目标快件的第一快件类型。
60、第三方面,本技术提供一种计算机设备,所述计算机设备包括:
61、一个或多个处理器;
62、存储器;以及
63、一个或多个应用程序,其中所述一个或多个应用程序被存储于所述存储器中,并配置为由所述处理器执行以实现第一方面中任一项所述的快件分离方法。
64、第四方面,本技术提供一种计算机可读存储介质,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行第一方面中任一项所述的快件分离方法中的步骤。
65、本技术提供一种快件分离方法及装置,该快件分离方法包括:获取深度相机对摆轮装置的输送面拍摄得到的二维图像和三维点云数据;当基于二维图像进行快件检测得到快件检测区域时,将三维点云数据中位于快件检测区域的点确定为第一快件点云集合;基于第一快件点云集合对快件检测区域中的目标快件进行快件识别,得到目标快件的第一快件类型;基于第一快件类型调节摆轮装置的输送方向,以分离不同类型的快件。本技术将进行快件识别的点云数据限定在对二维图像进行快件检测得到的快件检测区域中,在初步定位快件位置的基础上利用点云进行快件识别,减少了进行快件识别的点云数据,能够快速对快件分类并分离,从而能够提高快件分离的效率。
- 还没有人留言评论。精彩留言会获得点赞!