输电线张力放线走板状态人机交互监控系统的制作方法
1.本发明属于输电线张力放线技术领域,尤其涉及一种输电线张力放线走板状态人机交互监控系统。
背景技术:
2.张力放线的作为一种新型的放线方法具有能避免导线与地面摩擦致伤,减轻运行中的电晕损失及对无线电系统的干扰;施工作业高度机械化,速度快,工效高等优点,在我国超高压输电线路工程得到了广泛应用。尽管张力放线具有以上优点,但在实际的导线张力展放施工中,对于牵张设备的应用、走板的速度、姿态、导线的张力等主要是通过现场的监督人员使用对讲机进行联系,来控制牵张设备的停止或牵引。这样的联系很容易出现误差和错误,存在着安全隐患,以及对于工作的流畅度造成阻碍。
3.在整个输电线路的架线过程中,处在放线阶段中的导线张力放线是其中最重要的一个环节,也是线路施工中设备投入多,技术含量高,安全风险大的作业过程。而目前传统的张力放线方式无法做到在无监督人员的情况下完成整个放线过程,因此,研究在无监督人员时对张力放线走板状态的实时监控是很有必要的。
技术实现要素:
4.为了填补现有技术的空白,本发明提供一种输电线张力放线走板状态人机交互监控系统,包括系统走板状态监控中心、数据库模块、牵放设置模块、计算数值显示模块等;系统走板状态监控中心包含张力机出口张力与牵引机牵引力计算模块、走板所处杆塔位置模块、导线上扬与双滑车计算模块、走板倾角与速度显示模块、各子导线受力与走板拉力显示模块、放线段选择模块、走板所处杆塔位置模块并与数据库模块和牵放设置模块相连接;系统走板状态监控中心通过传感器与串口通讯来采集走板所处状态的数值,并由数据库中数据联立计算公式得出走板状态的结果,将结果进行判断分析后显示于系统走板状态监控中心。该系统有利于获得走板张力放线实时状态,实时掌握走板系统状态信息,并且操作方便,可大大降低走板跳槽和倾覆等故障率。
5.该系统可以获得走板张力放线实时状态,提供简洁、明了的系统各状态显示,可以缩短施工时间,减小放线误差,降低安全隐患,提高张力放线的精确性。
6.通过建立信息采集、传输、信息融合预警系统,以保证在整个放线过程中,所有的重要信息都能及时准确地传送至控制中心,实现对放线走板状态的实时监控,并且通过分析当前走板的状态给出预警信号和相应的调整策略,不仅减轻现场工作人员负担,也减轻控制中心人员的控制负担,提高放线效率。
7.其具体采用以下技术方案:
8.一种输电线张力放线走板状态人机交互监控系统,基于计算机系统,其特征在于:在走板上设置有gps模块、倾角传感器和拉力传感器;在数据库中存储有各段基准杆塔经纬度、各杆塔塔距,高差和倾角信息,以及是否有重要跨越物的信息;
9.通过重要跨越物距离临近杆塔的水平距离、重要跨越物的安全距离、重要跨越物与临近杆塔导线挂点的高差,计算获得本段何处杆塔的牵引绳需要上扬或挂双滑车;
10.通过接受到的传回的经纬度信息后,调用数据库中基准杆塔经纬度信息,将经纬度的单位全换算为度之后通过俩点间距离公式计算得出实时走板位置信息;
11.通过采集或计算获得张力机的出口张力和牵引机的牵引力;
12.系统对牵引绳需要上扬或挂双滑车的信息、走板位置信息、走板拉力、走板倾角、张力机的出口张力和牵引机的牵引力的数值进行显示,并对超出设定的阈值的情况进行告警。
13.进一步地,当走板倾斜角与转向滑车预倾斜角相等,即λ=η时,求得使走板倾斜角与转向滑车预倾斜角相同时对应的四根子导线的张力机出口张力,四根子导线的张力机出口张力与走板倾斜角度的关系为:
[0014][0015]
其中,t1为张力机一号子导线出口张力;t2为张力机二号子导线出口张力;t3为张力机三号子导线出口张力;t4为张力机四号子导线出口张力;β为控制档的高差角;d为走板的长度;d为平衡锤的长度;λ为走板的倾斜角,λ=η;ki为放线档张力系数,是线档放线水平张力与张力计出口张力的比值。
[0016]
进一步地,通过放线段选择模块进入数据库中选择放线段,系统依据所选的放线段读取数据库中此放线段对应的信息,并对此段各个杆塔号以及走板此时所处杆塔位置进行显示;
[0017]
再由串口通讯模块从所述gps模块接收到当前走板经纬度信息,经与选定的放线段初始基准杆塔经纬度位置信息比较计算后得出走板此时所处的杆塔实时位置,在走板与基准杆塔之间距离即将超过基准杆塔档距时,更新基准杆塔号,并在每次基准杆塔号更新时,系统自动备份此段的基准杆塔值。
[0018]
进一步地,采用mscomm控件进行串口通讯,循环接收走板上设置的gps模块、倾角传感器和拉力传感器所采集的信息。
[0019]
进一步地,系统通过vs和mysql数据库进行链接使所述数据库通过mysql数据库存储数据,在mysql数据库中存储的数据包括:系统参数配置信息、各放线段信息以及用户登入账号和密码信息。
[0020]
本发明及其优选方案的有益效果包括:
[0021]
1、能在施工时,快速得出准确的各子导线受力与走板拉力、走板所处杆塔位置、走板的俯仰与侧翻倾角、走板速度,易于观察;2、在选择完不同放线段后,进入系统状态监控中心能提供此段中哪些杆塔导线会上扬或挂双滑车,并显示此放线段张力机张力与牵引机牵引力,方便施工者做出预处理和判断;3、通过判断走板所处状态做出提示,对状态异常进行告警。
附图说明
[0022]
下面结合附图和具体实施方式对本发明进一步详细的说明:
[0023]
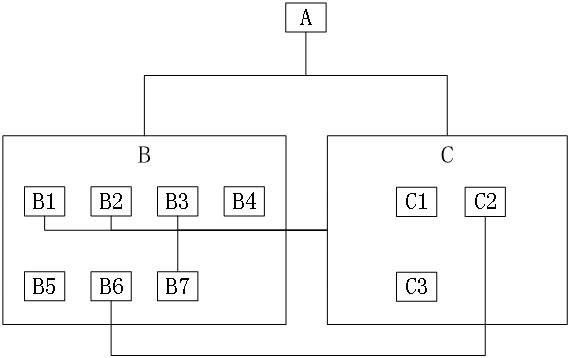
图1为本发明实施例系统结构原理示意图。
具体实施方式
[0024]
为让本专利的特征和优点能更明显易懂,下文特举实施例,作详细说明如下:
[0025]
本实施例提供的输电线张力放线走板状态监控系统的各功能模块组成如图1所示,其主要包括系统登入模块a、系统走板状态监控中心b、数据库模块c;
[0026]
其中,系统登入模块a用于对管理人员和登入密码进行管理,当输入正确密码以及用户名后可选择进入或数据管理进入系统走板状态监控中心b或数据库模块c。
[0027]
系统走板状态监控中心b包含张力机出口张力与牵引机牵引力计算模块b1、串口通讯模块b2、导线上扬与双滑车计算模块b3、走板倾角与速度显示模块b4、各子导线受力与走板拉力显示模块b5、放线段选择模块b6、走板所处杆塔位置模块b7、走板启停控制模块b8并与数据库模块c相连接。
[0028]
具体的,张力机出口张力与牵引机牵引力计算模块b1、导线上扬与双滑车计算模块b3与数据库模块c、放线段选择模块b6相连接;通过放线段选择模块b6选择完放线段后可读取数据库模块c中此段各杆塔塔距、高差、倾角信息以及是否有重要跨越物,若有重要跨越物则根据读取的三项数据(重要跨越物距离临近杆塔的水平距离、重要跨越物的安全距离、重要跨越物与临近杆塔导线挂点的高差)来计算出此段何处杆塔的牵引绳需要上扬或挂双滑车;在得到各杆塔塔距、高差等信息后经计算后可得出此放线段张力机出口张力、牵引机牵引力并显示于张力机出口张力与牵引机牵引力计算模块b1、导线上扬与双滑车计算模块b3(张力机出口张力、牵引机牵引力也可以直接通过传感器进行采集获得);
[0029]
具体的,串口通讯模块b2系统通讯采用mfc中独特的串口通讯控件
‑‑
mscomm控件进行串口通讯,其循环接收走板上gps、倾角传感器、拉力传感器信息;在接收到走板上gps传回的经纬度信息后,调用数据库中基准杆塔经纬度信息,将经纬度的单位全换算为度(
°
)通过俩点间距离公式计算可得出此时走板位置信息并将数据显示于走板所处杆塔位置模块b7、在接收到倾角传感器以及拉力传感器信息后通过十六进制与十进制之间进制转换可将数据显示于走板倾角与速度显示模块b4与各子导线受力与走板拉力显示模块b5;
[0030]
具体的,走板倾角与速度显示模块b4包含走板的实时俯仰角度、侧翻角度与走板速度,其数据通过倾角传感器传输,在获得数据并显示于走板倾角与速度显示模块b4后,若实际值超过理论阈值则会有红色灯光闪烁预警;
[0031]
各子导线受力与走板拉力显示模块b5包含实时显示4个子导线的不同牵引力以及走板拉力,若牵引力或拉力的实际值超过理论阈值则会有红色灯光闪烁预警,当走板倾斜角与转向滑车预倾斜角相等,即λ=η,可求得使走板倾斜角与转向滑车预倾斜角相同时对应的四根子导线的张力机出口张力,四根子导线的张力机出口张力与走板倾斜角度的关系为:
[0032][0033]
其中,t1为张力机一号子导线出口张力;t2为张力机二号子导线出口张力;t3为张力机三号子导线出口张力;t4为张力机四号子导线出口张力;β为控制档的高差角;d为走板的长度;d为平衡锤的长度;λ为走板的倾斜角,λ=η;ki为放线档张力系数,是线档放线水平张力与张力计出口张力的比值。
[0034]
具体的,走板所处杆塔位置模块b7与数据库模块c、放线段选择模块b6相连接,通过放线段选择模块b6进入数据库模块c中选择完放线段后点击退出会进入走板状态监控中心b,系统依据所选放线段来读取数据库模块c中此放线段信息,经软件转换后于走板所处杆塔位置模块b7中展示出此段各个杆塔号以及走板此时所处杆塔位置,走板已经走过的杆塔此时会标为绿色灯光,未走过的杆塔为灰色;走板所处杆塔位置模块b7通过gps定位后由串口通讯模块b2从硬件接收到此时走板经纬度信息,经与放线段选择模块b6所选定的放线段初始基准杆塔经纬度位置信息比较,由俩点间距离公式计算后得出走板此时所处的杆塔实时位置,在走板与基准杆塔之间距离即将超过基准杆塔档距时,依据软件策略改变基准杆塔号,使得走板所处的杆塔位置信息能得到精确计算并显示于系统走板状态监控中心b,并在每次基准杆塔号改变时,系统会自动备份此段的基准杆塔值,以确保系统下次工作时有效判别走板位置信息;
[0035]
走板启停控制模块b8与串口通讯模块b2相连接,通过与走板硬件部分进行对应数据的收发来操控走板运动状态的启停;
[0036]
硬件供电电池电量显示模块b9,系统经与电量检测传感器通讯后得到走板上硬件电路供电电池所剩电量并显示于硬件供电电池电量显示模块b9,在电池电量低于百分之二十时电池灯光为红色,电池电量高于百分之二十但低于百分之四十时电池灯光为橙色,电池电量高于百分之四十且不高于百分之百时电池灯光为绿色;
[0037]
具体的,数据库模块c包含数据显示模块c1、放线段模块c2、牵放设置模块c3、数据管理模块c4并与系统走板状态监控中心b、系统登入模块a相连接;数据库模块c主要用于储存各杆塔杆号、杆塔间档距、高差、倾角、导线部件的参数信息以及用户登入账号和密码,并且可用于对杆塔信息进行添加、修改、删除等操作;数据库模块c中存储的数据会被张力机出口张力与牵引机牵引力计算模块b1、导线上扬与双滑车计算模块b3、走板所处杆塔位置模块b7调用,计算得到结果后进行相应显示;牵放设置模块c3用于输入导线信息c31、牵引绳信息c32、滑车信息c33并可以对其进行修改。
[0038]
数据显示模块c1可以将不同放线段的杆塔号、高差、档距、是否有重要跨越物、经度、纬度信息以表格形式显示于数据显示模块c1。
[0039]
数据数据管理模块c4可选择增加杆塔,此时会提示杆塔的输入方位,并转至杆塔增加页面,于此页面可以输入杆塔号、档距、高差、是否有重要跨越物以及经纬度信息,在输入完成后会保存于数据库中并刷新数据显示模块c1;若需要修改某杆塔数据时,点击此行数据再由数据数据管理模块c4中修改控件可进入修改数据页面,此时修改数据页面会读取所选择行的杆塔的各项信息并将信息装填于修改页面的对应位置,根据需求修改后点击确定会将数据保存于数据库中并刷新数据显示模块c1显示修改后的数据,若需要删除某杆塔
数据时,点击此行数据直接进行删除;
[0040]
具体的,系统通过vs与mysql数据库进行链接使得数据库模块c中数据通过mysql数据库存储数据,在mysql数据库主要存储数据包括牵放设置模块c3中的导线信息c31、牵引绳信息c32、滑车信息c33、各放线段杆号、杆塔档距、高差、是否有重要跨越物、经度、维度以及系统登入模块a中的用户登入账号和密码。
[0041]
下面以一具体实施例对本发明的工作步骤作进一步说明。
[0042]
本实施例的输电线张力放线走板状态监控系统,按如下步骤实施:
[0043]
1.系统登入模块a输入正确的管理员用户名以及密码,选择并进入数据库模块c。
[0044]
2.在数据库模块c中,点击放线段模块c2校对此放线段杆号、档距、高差、经度、纬度等参数信息是否与施工要求一致,如若有误则对参数信息进行添加、修改、删除等操作,再点击牵放设置模块c3,并对牵放设置模块c3中的导线信息c31、牵引绳信息c32、滑车信息c33进行选择设计,完成后退出牵放设置模块c3,再退出数据库模块c,进入系统走板状态监控中心b。
[0045]
3.进入系统走板状态监控中心b后,按照现场施工要求由选择放线段模块b6对放线段进行选择,此时会跳转进入数据库模块c,在选择完放线段后,退出数据库模块c进入系统走板状态监控中心b,此时张力机出口张力与牵引机牵引力计算模块b1、导线上扬与双滑车计算模块b3、走板所处杆塔位置模块b7显示相应的计算结果以及此时放线段的杆塔信息。
[0046]
4.完成如上操作后,需要实时观察走板此时的状态则打开串口通讯模块b2,此时系统会与走板倾角传感器、拉力传感器、gps进行通讯,并将通讯后的计算结果显示在走板倾角与速度显示模块b4、各子导线受力与走板拉力显示模块b5、走板所处杆塔位置模块b7上。
[0047]
5.根据系统提示,当走板倾角、子导线所受牵引力、走板拉力等超出阈值时系统会出现预警提示,并根据调整策略进行相应操作。
[0048]
6.对于走板状态操控可由走板启停控制模块b8进行远程操作,并通过硬件供电电池电量显示模块b9观测此时供电电池电量是否充足。
[0049]
本专利不局限于上述最佳实施方式,任何人在本专利的启示下都可以得出其它各种形式的输电线张力放线走板状态人机交互监控系统,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本专利的涵盖范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1