一种实测轮轨蠕滑曲线模拟方法与流程
1.本发明涉及铁道工程领域,尤其涉及一种实测轮轨蠕滑曲线模拟方法。
背景技术:
2.现有车辆-轨道耦合动力学中黏着-蠕滑曲线的模拟大多采用polach的模型或其扩展形式,但无法获取轮轨局部接触解;科研人员为准确分析低黏着状态下轮轨接触斑内的接触应力以及滑移,应考虑黏着-蠕滑特性、接触力学行为的耦合作用关系。maksym spiryagin等在kalker简化理论的基础上提出了改进的fastsim算法,e.a.h.vollebregt在contact中扩展开发了考虑与滑移相关的摩擦系数和第三介质层的赫兹算法。
3.polach模型、改进fastsim算法和contact的扩展程序均可以模拟实测的蠕滑曲线,但存在着无法获取切向应力分布、切向应力分布误差大、参数选取缺乏科学性等问题。polach在kalker简化理论和线性理论的基础上,通过引入经验参数发展的计算模型可取得与实测蠕滑曲线相吻合的数据,但是polach模型假定切向力在黏着区呈线性分布直接获取蠕滑力解析解,无法获取切向应力分布;虽然polach模型应用较为广泛,但曲线拟合参数的获取并没有一套标准、高效的流程,多为研究人员主观选取,缺乏科学性;maksym spiryagin等在kalker简化理论的基础上提出了改进的fastsim算法,由于算法中采用了不准确的抛物线切向接触边界,虽然可以得到轮轨接触的切向接触应力分布,但误差较大,约为5-25%;e.a.h.vollebregt在contact中扩展开发了考虑与滑移相关的摩擦系数和第三介质层的赫兹算法,计算准确但计算成本高,无法应用于车辆-轨道耦合动力学中。sichani改进的fastrip算法较大地提高了切向解的精度,在存在横向蠕滑和自旋的情况下,切向解的误差较于fastsim从18%降低到2%,同时计算成本较低,但是无法获得与实测蠕滑曲线相吻合的结果,需要进行扩展。
技术实现要素:
4.针对背景技术中存在的问题,提出一种实测轮轨蠕滑曲线模拟方法。
5.本发明引入四个修正参数μs、a、b和f,对fastrip算法进行修正,使其可考虑实测蠕滑曲线;提出拟合参数初值的计算方法,利用遗传算法获得与实测数据相吻合的拟合参数,使拟合蠕滑曲线与实测数据之间的误差降到最小,可输出较为准确的切向接触解,提高了拟合稳定性,减小了参数的误差,且通用性强。另外,此方法与原fastrip算法对比,局部接触解更准确,更能反应出实测线路的黏着-蠕滑特性。
6.本发明提出一种实测轮轨蠕滑曲线模拟方法,该方法基于修正的fastrip算法,步骤如下:
7.s1、处理实测数据,获取待拟合曲线的折减系数控制区间和摩擦参数控制区间;
8.s2、引入四个修正参数μs、a、b和f,确定参数的取值范围:
9.s21、斜率因子f的取值范围:根据实测试验确定kalker系数c
11
,接触椭圆长半轴长度a,轮轨材料剪切模量g,第三介质层的厚度h
(3)
,第三介质层剪切模量g
(3)
的数值;将上述
参数值代入公式得到f的数值;将f的初步拟合数值的
±
10%作为遗传算法寻优的取值范围;
10.s22、变摩擦参数μs、a、b的取值范围:提取摩擦系数控制区间的数据点;依据变摩擦公式μ=μs((1-a)e-bω
+a)对摩擦系数控制区间的数据点进行非线性拟合;对拟合公式进行参数辨识,获得μs、a、b的初步拟合数值;将μs、a、b的初步拟合数值的
±
10%作为遗传算法寻优的取值范围;
11.s3、基于遗传算法进行参数拟合:
12.s31、确定目标函数;
13.s32、参数拟合:按照一定规则将参数即种群的个体转换为计算机可识别的数据串;随后计算目标函数,得到种群每个个体的适应度值,由适应度值选择个体,被选的个体会发生类似于自然界中染色体上的交叉和变异的现象;
14.s33、经过上述步骤完成一次进化,得到一个新的更符合要求的种群,然后再不断重复该过程,直到遗传代数达到设定值,精度达到要求时停止拟合过程。
15.优选的,变摩擦公式中μs为最大摩擦系数,a和b为摩擦调节参数,ω是滑移速度矢量。
16.优选的,忽略自旋,ω可以表示为其中,v为机车速度,m/s;ξ、η分别为纵向和横向蠕滑率。
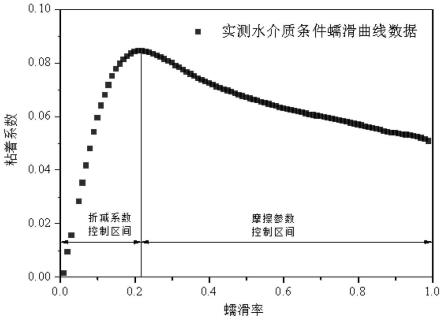
17.优选的,s1中需对实测数据进行分段,取实测蠕滑曲线的峰值作为分界点,对应蠕滑率称为滑行临界蠕滑率,小于滑行临界蠕滑率的部分数据在拟合时主要由折减系数控制,称为折减系数控制区间;大于滑行临界蠕滑率的部分数据在拟合时主要有摩擦参数控制,称为摩擦参数控制区间。
18.优选的,在s31中目标函数为其中μ
real
,μ
fit
分别代表拟合蠕滑曲线上的黏着系数和实测黏着系数,实验数据点的个数为n个。
19.优选的,在拟合蠕滑曲线上取与实测数据的点相同蠕滑率处的对应黏着系数,两者的差值ri即反应在该点上拟合曲线与实测数据的误差大小;此目标函数把每个点的误差平方相加得到整条曲线总的误差值r。
20.优选的,在s32中,交叉是参数之间的部分数据交换,变异是改变个体即参数编码数据串上某一位或某些位的值。
21.与现有技术相比,本发明具有如下有益的技术效果:
22.本发明通过引入四个修正参数μs、a、b和f改进fastrip算法,并基于遗传算法实现实测数据的拟合,得到的拟合曲线能达到很好的拟合效果,使拟合蠕滑曲线与实测数据之间的误差降到最小,可输出较为准确的切向接触解,提高了拟合精度,减小了参数的误差。另外,此方法与原fastrip算法对比,局部接触解更准确,更能反应出实测线路的黏着-蠕滑特性,具有更高的拟合精度和稳定性,且通用性强。
附图说明
23.图1为本发明一种实施例中实测数据示意图;
24.图2为本发明一种实施例中方法流程框图;
25.图3为本发明一种实施例中拟合效果示意图;
26.图4为本发明一种实施例中切向接触结构示意图(纵向蠕滑率为0.02)。
具体实施方式
27.本发明提出的一种实测轮轨蠕滑曲线模拟方法,该方法基于修正的fastrip算法,步骤如下:
28.一、处理实测数据,获取待拟合曲线的折减系数控制区间和摩擦参数控制区间。具体操作为:对实测数据进行分段,如图1所示,取实测蠕滑曲线(160km/h,水介质条件)的峰值作为分界点,对应蠕滑率称为滑行临界蠕滑率,小于滑行临界蠕滑率的部分数据在拟合时主要由折减系数控制,称为折减系数控制区间;大于滑行临界蠕滑率的部分数据在拟合时主要有摩擦参数控制,称为摩擦参数控制区间。
29.二、引入四个修正参数μs、a、b和f,对fastrip算法进行修正:
30.在fastrip算法基础上,考虑变摩擦系数,即摩擦系数μ与滑移速度相关,按下式计算μ=μs((1-a)e-bω
+a);式中μs为最大摩擦系数,a和b为摩擦调节参数,ω是滑移速度矢量。
31.实测中观察到的水、污染物等轮轨间第三介质引起的轮轨接触非线性的影响通过引入一个斜率因子f来定性地表示,用于降低kalker系数c
11
、c
22
、c
23
,f可由下式表示其中,c
11
为kalker系数,a为接触椭圆长半轴长度,g为轮轨材料剪切模量,h
(3)
为第三介质层的厚度,g
(3)
为第三介质层剪切模量。
32.三、确定参数的取值范围:
33.斜率因子f的取值范围:根据实测试验确定kalker系数c
11
,接触椭圆长半轴长度a,轮轨材料剪切模量g,第三介质层的厚度h
(3)
,第三介质层剪切模量g
(3)
的数值,在160km/h水介质的试验条件下可分别取为3.849、10.115、7.477、82000、1.25和8200;将上述参数值代入公式得到f的数值,160km/h水介质条件下的试验条件下,f的数值为3.413;将f的初步拟合数值的
±
10%作为遗传算法寻优的取值范围。
34.变摩擦参数μs、a、b的取值范围:提取摩擦系数控制区间的数据点;依据变摩擦公式μ=μs((1-a)e-bω
+a)对摩擦系数控制区间的数据点进行非线性拟合;对拟合公式进行参数辨识,获得μs、a、b的初步拟合数值,得到的结果为μs=0.106、a=0.389、b=4.108;将μs、a、b的初步拟合数值的
±
10%作为遗传算法寻优的取值范围。
35.变摩擦公式中μs为最大摩擦系数,a和b为摩擦调节参数,ω是滑移速度矢量。忽略自旋,ω可以表示为其中,v为机车速度,m/s;ξ、η分别为纵向和横向蠕滑率。
36.四、基于遗传算法进行参数拟合:
37.确定目标函数:本发明中目标函数为其中μ
real
,μ
fit
分别代表拟合蠕滑曲线上的黏着系数和实测黏着系数,实验数据点的个数为120个。在拟合蠕滑曲线上取与实测数据的点相同蠕滑率处的对应黏着系数,两者的差值ri即反应在该点上拟合曲线与实测数据的误差大小;此目标函数把每个点的误差平方相加得到整条曲线总的误差值r,以防止不同点误差值出现正负相消的情况。
38.参数拟合:按照一定规则将参数即种群的个体转换为计算机可识别的数据串;随后计算目标函数,得到种群每个个体的适应度值,由适应度值选择个体,被选的个体会发生类似于自然界中染色体上的交叉和变异的现象。交叉是参数之间的部分数据交换,变异是改变个体即参数编码数据串上某一位或某些位的值。
39.经过上述步骤完成一次进化,得到一个新的更符合要求的种群,然后再不断重复该过程,直到遗传代数达到设定值,精度达到要求时停止拟合过程。
40.本发明通过对实测数据进行拟合,所得拟合蠕滑曲线如图3所示。从图3可以看出,此方法得到的拟合曲线能达到很好的拟合效果,因此提高了拟合精度,减小了参数的误差。另外,此方法输出的纵向蠕滑率为0.02时的切向接触结果如图4所示,可以看出对比原fastrip算法,改进的fastrip的局部接触解更准确(相对于contact),说明改进的fastrip算法更能准确地反应出实测线路的黏着-蠕滑特性。
41.本发明选取合适的目标函数,利用遗传算法进行拟合,使拟合蠕滑曲线与实测数据之间的误差降到最小,在模拟实测蠕滑曲线的同时,可输出较为准确的切向接触解,提升了计算精度。因此,该方法具有更高的拟合精度和稳定性,且通用性强。
42.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1