一种基于高斯尾流模型的风电机组尾流特性分析方法与流程
1.本发明属于新能源并网与调度运行技术领域,涉及一种基于高斯尾流模型的风电机组尾流特性分析方法,应用于电力部门对多种新能源发电的协调调度。
背景技术:
2.风电机组尾流模型从研究方法上大致分两类:一种是基于状态方程推导出的理论模型,另一种则是基于cfd等各类软件的数值模型。由于计算机技术的发展,各类数值软件的应用越来越深入,取得了较高的精度,但理论模型以其理论性强、适用广泛并且计算快捷等优点,依然是风电场尾流效应研究的最有效方法之一。
3.现有技术中,对于风电机组尾流模型进行了的研究较多,但是,很少有考虑不同气象、地形因素等条件下,根据实测数据进行尾流模型验证。
4.为此,提出了一种基于高斯尾流模型的风电机组尾流特性分析方法。
技术实现要素:
5.本发明的目的是提供一种基于高斯尾流模型的风电机组尾流特性分析方法,根据不同工况(环境湍流强度、温度、来流风速等条件)对高斯模型参数进行调整进而提高模型预测准确度。
6.为了实现上述目的,本发明采用的技术方案如下:
7.一种基于高斯尾流模型的风电机组尾流特性分析方法,包括以下步骤:
8.s1:建立基于高斯尾流模型的高斯风速分布模型;
9.s2:建立基于高斯尾流模型的高斯功率分布模型;
10.s3:基于高斯尾流模型的单列风电机组尾流叠加模型建立。
11.进一步地,所述s1中,建立基于高斯尾流模型的高斯风速分布模型的方法:
12.s1.1.根据质量守恒和动量守恒定律,并将高斯分布应用于速度分布当中,高斯尾流模型假设:尾流初始直径为风轮直径;尾流增长速率呈非线性;尾流径向及横向坡面上的速度是不均匀的,呈高斯分布;
13.s1.2.选取控制体,假设尾流场是均匀场,且分为三个区域:两台风电机组之间的尾流区域、环绕两台风电机组之间尾流区域侧边的区域、两台风电机组之间的尾流区域之后的区域。
14.进一步地,所述步骤s1.2.中,根据质量守恒定律:
15.m2=ρu
waw-ρuaa0ꢀꢀꢀꢀ
(1)
16.其中,m2表示从环绕两台风电机组之间尾流区域侧边的区域流入尾流范围内的流体质量,ρ是空气密度;
17.根据一维动量理论:
18.ua=u
∞
(1-a)
ꢀꢀꢀꢀ
(2)
19.其中,a为轴向诱导因子,定义为
20.由(1)、(2)式,得:
21.m2=ρu
waw-ρu
∞
(1-a)a0ꢀꢀꢀꢀ
(3)
22.由流动方向上的动量守恒定律:
23.m1u
∞
(1-a)+m2u
∞
=m3uwꢀꢀꢀꢀ
(4)
24.由(3)、(4)两式化简,得:
[0025][0026]
变形得到:
[0027][0028]
其中,r0是风电机组半径,引入尾流下降系数k,表示尾流半径r随下游距离x的变化率,其定义如下:
[0029]
k=drw/dx
ꢀꢀꢀꢀ
(7)
[0030]
则尾流半径应满足:
[0031]rw
=r0+kx
ꢀꢀꢀꢀ
(8)
[0032]
定义尾流区域中有速度亏损的流量质量与总流量质量的比为m(x),则对m(x)有:
[0033][0034]
对基于高斯尾流模型的高斯风速分布模型的速度亏损进行高斯分布化,按照三维坐标轴定义,其中x方向为流向方向,y方向为截面处的水平方向,z方向为截面处的垂直方向,按照高斯分布则有:
[0035][0036]
其中,zh为轮毂中心高度,c(x)为关于x和标准差σ的函数;
[0037]
基于传统线性扩张模型,m(x)定义为:
[0038][0039]
基于高斯分布,m(x)定义为:
[0040][0041]
由(11)、(12)式可得:
[0042][0043]
将(6)、(13)式代入(10)式,得:
[0044][0045]
当不考虑风切变的影响时,在尾流界面同一半径处尾流速度应该相同,所以将其简化为二维模型,即:
[0046][0047]
其中,r为对应截面半径rw的截面上任意一点的半径;定义为β,β为一定值,是根据不同的计算环境选取的,式(1)-(15)中,x为风电机组下游距离,u
∞
为环境来流风速,ua为风电机组后方轮毂处的风速,d0为风电机组直径,uw为风电机组下游x处的风速,rw为尾流区域横截面的半径。
[0048]
优选地,所述β一般取1.5-2.5,而k值一般取0.04-0.08。
[0049]
进一步地,步骤s2中,所述基于高斯尾流模型的高斯功率分布模型建立方法:
[0050]
假设来流定常、无粘,且不考虑风切变的影响,那么在尾流截面上同一半径处尾流速度应该相等;
[0051]
在离风轮中心半径距离r处取一个圆环,圆环长度为dr,风轮半径为r0,则此圆环的面积ds为:
[0052]
ds=2πrdr
ꢀꢀꢀꢀ
(16)
[0053]
对流过此圆环的风功率p'有:
[0054][0055]
假设风轮利用率为ε,则对风电机组功率p有:
[0056]
dp=dp'
·
ε
ꢀꢀꢀꢀ
(18)
[0057]
由(15)、(16)、(17)、(19)可得:
[0058][0059]
上游首排风电机组功率为:
[0060][0061]
由(37)、(38)可得无量纲功率比值pw:
[0062][0063]
进一步地,步骤s3中,基于高斯尾流模型的单列风电机组尾流叠加模型建立方法:定义un表示第n台风电机组的来流风速,an表示到达第n台风电机组的尾流截面面积,u
∞
为环
境风速;
[0064]
考虑到高斯分布模型的非线性,提出适用于高斯分布的单列风电机组尾流效应叠加模型;取第一台风电机组和第二台风电机组作为控制体,根据欧拉输运公式有:
[0065][0066]
式中,u1表示第一台风电机组尾流风速,u2表示第二台风电机组尾流风速,u
12
表示第一台风电机组在第二台风电机组处的尾流风速;选取任意一台风电机组与第n台风电机组作为控制体可得:
[0067][0068]
选取第一台风电机组和第n台风电机组之间所有风电机组作为控制体,则有:
[0069][0070]
联立(41)和(42),得:
[0071][0072]
由上式即可求得第n台风电机组尾流截面处的风速;
[0073]
由于高斯速度分布模型的非线性,定义求得的尾流截面风速为“等效截面尾流速度”,即与高斯非线性速度分布等效的线性速度分布,将第n台风电机组的等效截面速度代入(26)式中即可求得第(n+1)台风电机组与第1台风电机组的无量纲功率比:
[0074][0075]
式中,un为第n台风电机组的等效尾流截面功率速度,其定义为:
[0076][0077]
式中,r
x
为等效尾流截面半径。
[0078]
且综上所述,由于采用了上述技术方案,发明的有益技术效果是:
[0079]
(1)对高斯风速、功率及功率叠加模型,当取得合适的β及尾流半径增长系数k时,高斯模型可以较准确的模拟风电机组的尾流特性,计算单台风电机组的功率,模拟单列各台风电机组的功率变化情况;且β及k的取值与推力系数c
t
值的大小有关;
[0080]
(2)可根据不同工况(环境湍流强度、温度、来流风速等条件)对高斯模型参数进行
调整,从而提高模型预测准确度。
附图说明
[0081]
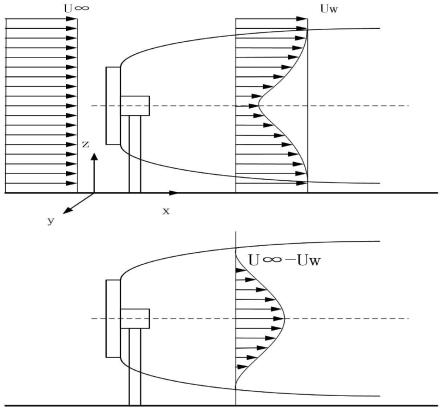
图1高斯分布模型示意图
[0082]
图2高斯分布模型控制体示意图
[0083]
图3高斯功率分布模型
[0084]
图4单列风电机组尾叠加模型流示意图
[0085]
图5轮毂高度风速分布与高斯风速分布模型计算结果对比图
[0086]
图6机组运行数据与高斯功率叠加模型计算结果
具体实施方式
[0087]
为了使发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释发明,并不用于限定发明。
[0088]
步骤1:建立基于高斯尾流模型的高斯风速分布模型
[0089]
高斯分布模型如图1,考虑了质量守恒和动量守恒定律,并将高斯分布应用于速度分布当中。该尾流模型假设:
①
尾流初始直径为风轮直径;
②
尾流增长速率呈非线性;
③
尾流径向及横向坡面上的速度是不均匀的,呈高斯分布,且其中,u
∞
为环境来流风速,uw为尾流横截面处的风速。
[0090]
图2是所选取的控制体。假设尾流场是均匀场,x为风电机组下游距离,u
∞
为环境来流风速,ua为风电机组后方轮毂处的风速,d0为风电机组直径,uw为风电机组下游x处的风速,rw为尾流区域横截面的半径。
①
表示两台风电机组之间的尾流区域,
②
表示环绕
①
区域侧边的区域,
③
表示
①
区域之后的区域。
[0091]
根据质量守恒定律:
[0092]
m2=ρu
waw-ρuaa0ꢀꢀꢀꢀ
(1)
[0093]
其中,m2表示从
②
区域流入尾流范围内的流体质量,ρ是空气密度。
[0094]
根据一维动量理论:
[0095]
ua=u
∞
(1-a)
ꢀꢀꢀꢀ
(2)
[0096]
其中,a为轴向诱导因子,定义为
[0097]
由(1)、(2)式,得:
[0098]
m2=ρu
waw-ρu
∞
(1-a)a0ꢀꢀꢀꢀ
(3)
[0099]
由流动方向上的动量守恒定律:
[0100]
m1u
∞
(1-a)+m2u
∞
=m3uwꢀꢀꢀꢀ
(4)
[0101]
由(3)、(4)两式化简,得:
[0102][0103]
变形得到:
[0104][0105]
其中,r0是风电机组半径。引入尾流下降系数k,表示尾流半径r随下游距离x的变化率,其定义如下:
[0106]
k=drw/dx
ꢀꢀꢀꢀ
(7)
[0107]
则尾流半径应满足:
[0108]rw
=r0+kx
ꢀꢀꢀꢀ
(8)
[0109]
定义尾流区域中有速度亏损的流量质量与总流量质量的比为m(x),则对m(x)有:
[0110][0111]
上式对于尾流区域任意位置均成立。
[0112]
接下来对该模型的速度亏损进行高斯分布化。按照图1中的三维坐标轴定义,其中x方向为流向方向,y方向为截面处的水平方向,z方向为截面处的垂直方向。按照高斯分布则有:
[0113][0114]
其中,zh为轮毂中心高度,c(x)为关于x和标准差σ的函数。
[0115]
基于传统线性扩张模型,m(x)定义为:
[0116][0117]
基于高斯分布,m(x)定义为:
[0118][0119]
由(11)、(12)式可得:
[0120][0121]
将(6)、(13)式代入(10)式,得:
[0122][0123]
当不考虑风切变的影响时,在尾流界面同一半径处尾流速度应该相同,所以将其简化为二维模型,即:
[0124][0125]
其中,r为对应截面半径rw的截面上任意一点的半径;定义为β,β为一定值,是根据不同的计算环境选取的。根据输入特性,β一般取1.5-2.5,而k值一般取0.04-0.08。
[0126]
步骤2:建立基于高斯尾流模型的高斯功率分布模型
[0127]
高斯功率分布模型如图3所示,假设来流定常、无粘,且不考虑风切变的影响,那么在尾流截面上同一半径处尾流速度应该相等。
[0128]
为了计算扫过整个风轮的风功率,在离风轮中心半径距离r处取一个圆环,圆环长度为dr,风轮半径为r0,则此圆环的面积ds为:
[0129]
ds=2πrdr
ꢀꢀꢀꢀ
(16)
[0130]
对流过此圆环的风功率p'有:
[0131][0132]
假设风轮利用率为ε,则对风电机组功率p有:
[0133]
dp=dp'
·
ε
ꢀꢀꢀꢀ
(18)
[0134]
由(15)、(16)、(17)、(19)可得:
[0135][0136]
上游首排风电机组功率为:
[0137][0138]
由(37)、(38)可得无量纲功率比值pw:
[0139][0140]
步骤3:基于高斯尾流模型的单列风电机组尾流叠加模型建立
[0141]
单列风电机组的尾流叠加模型如图4所示:
[0142]
图中un表示第n台风电机组的来流风速,an表示到达第n台风电机组的尾流截面面积,u
∞
为环境风速。
[0143]
考虑到高斯分布模型的非线性,故提出以下适用于高斯分布的单列风电机组尾流效应叠加模型。取第一台风电机组和第二台风电机组作为控制体,根据欧拉输运公式有:
[0144][0145]
式中,u
12
表示第一台风电机组在第二台风电机组处的尾流风速。选取任意一台风电机组与第n台风电机组作为控制体可得:
[0146]
[0147]
选取第一台风电机组和第n台风电机组之间所有风电机组作为控制体,则有:
[0148][0149]
联立(41)和(42),得:
[0150][0151]
由上式即可求得第n台风电机组尾流截面处的风速。由于高斯速度分布模型的非线性,因此我们定义此处求得的尾流截面风速为“等效截面尾流速度”,即与高斯非线性速度分布等效的线性速度分布。将第n台风电机组的等效截面速度代入(26)式中即可求得第(n+1)台风电机组与第1台风电机组的无量纲功率比:
[0152][0153]
式中,un为第n台风电机组的等效尾流截面功率速度,其定义为:
[0154][0155]
式中,r
x
为等效尾流截面半径。由图1可知,高斯速度分布在中间速度亏损大,在边缘速度亏损小,并且由高斯分布定义可知,其在无穷远处也有速度亏损,所以不存在固定的尾流截面面积,因此边界不易取得。对此本发明中作以下设定:由于其在尾流边界处速度亏损极小,小到可以忽略对功率计算的影响,因此我们假设所有的尾流面直径大小均为2.5d0(d0为风轮直径,当尾流截面直径为2.5d0时,在下游距离为7d0处的速度分布如表1所示,下游每台风电机组在第一台风电机组尾流直径2.5d0处的速度分布如表2所示)。
[0156]
表1 7倍直径处速度不同半径处的速度亏损
[0157][0158]
表2下游各台风电机组在首台风电机组尾流截面半径2.5r0处的速度亏损
[0159][0160]
由上表可知,r
x
取为2.5r0时可以近似认为尾流速度已恢复到环境速度,若不考虑
实际工程中风轮效率随风速变化的影响,由(26)式即可直接计算出各台风电机组与首台风电机组的无量纲功率比。
[0161]
高斯风速分布模型验证
[0162]
以某风电场四个月测风数据中选取了代表性时间段单台风电机组尾流区风速测量数据,对高斯风速分布模型进行验证。该时间段来流风速为5.4m/s,机组推力系数为0.56。分别提取轮毂高度(h=70m)水平面上单台风电机组后不同距离位置处(2d、3d、4d、5d、6d、7d,d=d0=82m为风轮直径)的风速分布,并与高斯风速分布模型计算结果进行了对比,如图5。
[0163]
从上图对比中可以看出,高斯模型较准确的预测了尾流区风速分布规律,在远尾流区风速预测稍高于实际值,平均相对误差均小于10%。在尾流区域半径的计算上与实际测量有些误差,这主要是由于高斯速度分布在中间速度亏损大,在边缘速度亏损小,并且由高斯分布定义可知,其在无穷远处也有速度亏损,所以计算得到的尾流区域宽度比实际要大。
[0164]
高斯功率分布模型验证
[0165]
选取同一时间段两组上下游机组(case1:东侧第一排第八台与第二排第七台;case2:东侧第一排第七台与第二排第六台)作为研究对象,根据风向选取了下游机组受到上游机组尾流影响时段的雷达测风数据与机组运行数据,对高斯功率模型进行了验证,该时间段内来流风速为7.85m/s,机组推力系数为0.425。对比结果如表3所示,可知高斯功率模型计算结果误差较小,满足工程需要。
[0166]
表3上下游对比结果
[0167][0168][0169]
高斯叠加模型验证
[0170]
由于该风电场盛行风向为东风和西风,机组错列排布且纵向间距较大,大部分时间彼此尾流影响较小。从激光雷达测量结果中,选取了特定风向下四台机组串列排布的时间段数据,以东侧第一排第八台、第二排第七台、第三排第八台、第四排第八台机组作为研究对象。该时间段内来流风速为7.85m/s,机组推力系数为0.425。
[0171]
对比了该时间段机组运行数据与高斯功率叠加模型计算结果,结果如图6,横坐标row为机组排数,纵坐标pn/p1为对应的第n排机组与第一排机组无量纲功率比。计算结果与运行数据相差较小,最大差值为0.06,高斯功率叠加模型可以用来预测风速尾流叠加造成的功率损失。
[0172]
以上所述为发明的较佳实施例,并不用以限制发明,凡在发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1