一种TLS单站点云数据密度严密计算模型及其校正方法
一种tls单站点云数据密度严密计算模型及其校正方法
技术领域
1.本发明涉及点云密度计算的技术领域,尤其是一种tls单站点云数据密度严密计算模型及其校正方法。
背景技术:
2.地面三维激光扫描系统(terrestrial laser scanning,tls)是一种先进的主动遥感技术,无需与目标接触即可获取目标及其周边场景的高精度、高密度的激光点云数据。相较于传统的测量技术如全站仪、rtk、航空摄影测量、卫星观测等,tls可以获得毫米级分辨率和高精度的目标外轮廓点云数据,同时在测量效率和工作成本方面也具备极大的优势,在地形测量、林业调查、农业调查、灾害监测等领域有着广泛的应用。
3.tls获取的扫描数据包含几何信息和物理信息两部分,其中几何信息是指点云的三维空间坐标,物理信息是指点云的色彩信息和激光强度值。目前的研究应用大多都是基于点云数据的几何信息,即利用获取的点云三维空间坐标计算得到点云的法矢量、曲率、曲率变化率、密度、点线面特征等几何特征,进而利用几何特征进行目标的识别、分类和提取等研究。点云密度是指目标点周围一定空间范围内的点云数量,表明了目标的几何特征和空间分布等特性。密度作为点云最基础和最重要的几何特征之一,可用于点云的精细分类和目标特征提取,目前已被广泛应用于植被茎叶分离、建筑物轮廓提取等研究中,但是,点云密度通常会在不同的场景中变化,并且会随着扫描距离的增加而降低。相对于机载激光雷达和星载激光雷达与扫描目标距离通常较远且变化较小,tls与扫描目标更为接近,且距离变化幅度较大,因而这种变化对于tls扫描数据更为明显。因此,点云密度变化往往是几何特征提取中需要考虑的重要因素。
4.针对点云密度存在变化的问题,许多学者在其研究中采取了不同的应对策略, chen et al根据点云密度与扫描距离的关系设定自适应的密度搜索范围,以确保搜索邻域与点云密度保持相似的尺度,实现森林场景树干点云的提取。在此基础上,chen et al又通过扫描距离和角度分辨率估计点间距,根据点间距确定密度搜索邻域,并使用极坐标格网代替常用的格网去适应密度变化,提高了远距离建筑物的提取精度。che et al根据点云密度和扫描角度分辨率计算参考点密度,用于tls扫描数据的地面点滤波。cheng et al将点云投影至水平格网,统计每个格网中的点云数量并将其作为投影点密度(density of projected points, dopp),然后根据最远建筑物与扫描仪的距离、最小建筑物高度和扫描角度分辨率计算dopp自适应阈值,完成建筑物轮廓提取。以上研究可以在一定程度上利用变化的点云密度进行地物分类,但这些方法只能针对特定的地物,对于完整的场景还缺乏适用性,同时,大多数算法中需要提供较多的先验知识,算法的智能性还有待提升。
5.由于遮挡效应的影响,在利用tls扫描时通常需要架设多个测站去获取整个场景的完整数据,但与此同时也会导致整体数据中存在大量重叠,在重叠区域的点云密度会显著增大,这对于利用点云密度进行特征提取会产生极大地干扰,而对于单站tls扫描数据则不会受此影响,因此,通过研究单站tls点云密度进行特征提取,而后进行多个测站数据的
配准获得整个场景的特征是更优的策略。目前,有研究尝试建立tls单站点云的理论密度计算模型,通过消除模型中的客观要素(如距离、入射角等),得到改正后的点云密度仅与目标的几何特征(如尺寸)相关,最后在此基础上进行地物分类。这种方法不需要进行复杂的参数设置,亦并非针对特定的地物,具有较强的实用性。tan et al建立了点云密度与距离之间的理论模型,随后消除距离对点云密度的影响,利用校正后的点云密度进行森林茎叶分离。该研究建立的点云密度计算模型较为简单,仅适用于简单的场景 (如水平面、竖直面等),并未考虑目标物自身存在各种倾斜的情形,对于完整复杂场景的适用性较差。
技术实现要素:
6.本发明的目的是根据上述现有技术的不足,提供了一种tls单站点云数据密度严密计算模型及其校正方法,考虑了距离、水平和竖直角度分辨率、目标的任意空间分布状态等因素,基于扫描仪扫描原理和扫描点、线、面之间的空间分布及其内在几何关联,再借助扫描线与目标在水平和竖直方向的夹角来表示目标的空间分布状态,从数学上推导了tls单站点云中单点密度的严密计算模型,该模型适用于任意tls获取的任意场景中的任意形状和空间分布点的理论密度计算。同时,通过定义参考距离和角度,消除模型中客观要素的影响,基于密度严密计算模型,提出了一种tls单站点云的密度校正方法,得到校正后的点云密度仅与目标的几何尺寸/特征相关,可用于地物的提取、分类和识别等研究。
7.本发明目的实现由以下技术方案完成:
8.一种tls单站点云数据密度严密计算模型,其特征在于,所述模型包括:通过tls对目标进行逐线扫描;以tls的中心o为原点建立三维空间坐标系,利用目标点p的扫描线所处的竖直扫描平面f、目标点p左右相邻扫描线构成的平面 g分别与目标点p所处的微小平面e相交,求取两相交直线m和l的方向向量s2和s3,结合目标点p的扫描线op方向向量s1,得出目标点p扫描线分别与两所述相交直线m和l的夹角θ1和θ2,通过三角形正弦定理求解出水平和竖直点间距δh和δv,得到目标点外围平行四边形面积s,求取目标点圆形邻域面积与目标点外围平行四边形面积s的比值,得到点云密度。
9.所述逐线扫描为扫描线在竖直方向的垂直扫描角范围内进行由下往上或由上往下的扫描,以竖直角分辨率β为步长进行离散点测量,旋转一个水平角分辨率α后再次进行竖直扫描,直至完成指定的水平扫描角或一个圆周扫描后结束。
10.令p={pi,i=1,2,..,n}为点云集合,在目标点pi周围半径为r的球形邻域范围内的点云集合表示为:
11.r(pi,r)={pj/d(pi,pj)≤r,pj∈p and j≠i}
ꢀꢀ
(1);
12.式中:d(pi,pj)为目标点pi至pj的几何距离;
13.则点云集合r(pi,r)中的总点数为目标点pi的密度d(pi,r):
[0014][0015]
目标点pi的左右相邻点间距分别为pn、pm,前后或上下相邻点间距分别为 pk、pl,得目标点外围平行四边形的两边长δh和δv分别为:
[0016][0017]
令目标点p或pi的坐标为(xi,yi,zi),tls中心o的坐标为(x0,y0,z0),得扫描线op所在直线的方向向量s1为:
[0018]
s1=(x
i-x0,y
i-y0,z
i-z0)
ꢀꢀ
(4);
[0019]
假设平面e、f、g的平面方程为:
[0020][0021]
则平面e与平面f相交直线m的直线方程为:
[0022][0023]
求得直线m的方向向量s2为:
[0024][0025]
式中:i=(1,0,0),j=(0,1,0),k=(0,0,1),得s2为:
[0026]
s2=(b1c
2-b2c1,-a1c2+a2c1,a1b
2-a2b1)
ꢀꢀ
(8);
[0027]
结合式(4)、(8)可得扫描线op与直线m的夹角θ1的余弦值为:
[0028][0029]
则θ1=cos-1
(cosθ1),以∠opl作为θ1;
[0030]
在δopl中,由正弦定理得:
[0031][0032]
式中:为目标点至tls中心的几何距离;
[0033]
在δopk中,由正弦定理得:
[0034][0035]
结合式(3)、式(10)和式(11)得δv为:
[0036][0037]
平面e与平面g相交直线l的直线方程为:
[0038][0039]
求得直线l的方向向量s3为:
[0040][0041]
式中:i=(1,0,0),j=(0,1,0),k=(0,0,1),得s3为:
[0042]
s3=(b1c
3-b3c1,-a1c3+a3c1,a1b
3-a3b1)
ꢀꢀ
(15);
[0043]
结合式(4)和式(15)得扫描线op与直线l的夹角θ2的余弦值为:
[0044][0045]
则θ2=cos-1
(cosθ2),以∠opn作为θ2;
[0046]
在δopn中,由正弦定理得:
[0047][0048]
在δopm中,由正弦定理得:
[0049][0050]
结合式(3)、式(17)和式(18)得δh为:
[0051][0052]
∠opl、∠opn和∠lpn看作是以p为顶点的三棱锥的三个顶角,∠opl和∠opn分别为θ1和θ2,∠lpn为直线m和l的夹角,将其设为θ3,由四面体空间角的基本公式得:
[0053]
cosθ1·
cosθ2+sinθ1·
sinθ2·
cosγ=cosθ3ꢀꢀ
(20);
[0054]
式中:γ为平面f和平面g的二面角;由于平面f与平面g垂直,γ=90
°
,
[0055]
将式(20)简化为:
[0056]
cosθ1·
cosθ2=cosθ3ꢀꢀ
(21);
[0057]
则
[0058]
结合式(12)和式(19)得目标点外围平行四边形面积s的计算公式为:
[0059][0060]
将式(22)计算的目标点外围平行四边形面积s代入式(2)中,得到目标点 pi密度计算公式如下:。
[0061][0062]
平面e为目标点pi所在的平面,利用目标点周围的k个近邻点采用最小二乘法进行拟合,得到平面法向量为(ui,vi,wi),再结合该平面经过目标点pi,得到平面e的平面方程系数为:
[0063][0064]
由于平面f过点o(x0,y0,z0)和p(xi,yi,zi),且与xoy平面垂直,将其平面方程转化为过(x0,y0)和(xi,yi)的直线方程:
[0065][0066]
由式(25)得平面f的平面方程系数为:
[0067][0068]
其中,当xi=0时,平面f与yoz平面重合,此时其平面方程系数应为:a2=1, b2=0,c2=0,d2=0;由于平面g与平面f垂直,且过扫描线op,通过求取平面f的法向量s4=(a2,b2,c2)与扫描线op方向向量的外积,得到平面g的法向量s5:
[0069][0070]
式中,i=(1,0,0),j=(0,1,0),k=(0,0,1),得s5为:
[0071]
s5=((y
i-y0)c
2-(z
i-z0)b2,-(x
i-x0)c2+(z
i-z0)a2,(x
i-x0)b
2-(y
i-y0)a2)
ꢀꢀ
(28) ;
[0072]
结合式(26)将式(28)简化为:
[0073][0074]
由于平面g过tls中心点o,则可得到平面g的平面方程系数为:
[0075][0076]
其中,当xi=0时,平面g与yoz平面垂直,此时其平面方程系数为:a3=0, b3=z
i-z0,c3=-(y
i-y0),d3=yiz
0-ziy0;
[0077]
将式(24)、(26)和(30)代入式(9)和(16)中可求得θ1和θ2。
[0078]
一种tls单站点云数据密度严密计算模型的校正方法,其特征在于,所述校正方法包括:
[0079]
对目标点pi的密度d(pi,r)进行校正:
[0080][0081]
式中:dc(pi,r)为目标点pi校正后的密度,d'、θ1'、θ2'分别为参考距离、参考角度θ1、θ2,设定参考目标点空间坐标为参考目标点所在平面法向量为计算得到d'、θ1'、和θ2';
[0082]
将式(23)简化为:
[0083][0084]
得到简化后的密度校正公式为:
[0085][0086]
对于简化后的密度计算模型,分为以下三种情形:
[0087]
1)θ1和θ2均为90
°
,此时目标点所在微小平面e的法向量与扫描线op重合,扫描线op与平面e垂直,由式(32)得到此时的密度计算公式为:
[0088][0089]
由式(34)可得,此时的点云密度仅与距离的平方成反比,通过下式进行校正:
[0090][0091]
2)θ1=90
°
,θ2∈(0,90
°
],此时目标点所在微小平面e的法向量在平面g 上,扫描线与目标表面在竖直方向上始终保持垂直,90
°‑
θ2为激光入射角,由式(32)得到此时的密度计算公式为:
[0092][0093]
由式(36)可得,此时的点云密度与距离的平方成反比,与入射角的余角的正弦成正比,通过下式进行校正:
[0094][0095]
3)θ2=90
°
,θ1∈(0,90
°
],此时目标点所在微小平面e的法向量在平面f 上,扫描线与目标表面在水平方向上始终保持垂直,90
°‑
θ1为激光入射角,由式(32)得到此时的密度计算公式为:
[0096][0097]
由式(38)可得,此时的点云密度与距离的平方成反比,与入射角的余角的正弦成正比,通过下式进行校正:
[0098][0099]
本发明的优点是:具备较好的可行性、有效性和通用性,在目标的提取、分类和识别等tls点云数据处理中有巨大的应用价值。
附图说明
[0100]
图1为本发明不同几何特征目标的点云密度差异示意图;
[0101]
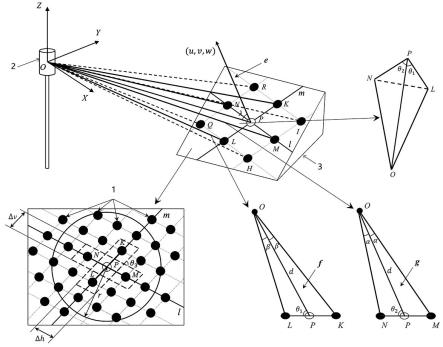
图2为本发明tls扫描原理及点云理论密度计算图;
[0102]
图3为本发明实验装置点云图;
[0103]
图4为本发明第一个室内实验装置布置图;
[0104]
图5为本发明第一个室内实验扫描点云数据图;
[0105]
图6为本发明第一个室内实验不同距离的点云密度分布图;
[0106]
图7为本发明第一个室内实验理论密度与实际密度相关性图;
[0107]
图8为本发明第二个室内实验装置布置图;
[0108]
图9为本发明第二个室内实验不同角度θ1的点云密度分布图;
[0109]
图10为本发明第二个室内实验理论密度与实际密度相关性图;
[0110]
图11为本发明第三个室内实验装置布置图;
[0111]
图12为本发明第三个室内实验不同角度θ2的点云密度分布图;
[0112]
图13为本发明第三个室内实验理论密度与实际密度相关性图。
具体实施方式
[0113]
以下结合附图通过实施例对本发明特征及其它相关特征作进一步详细说明,以便于同行业技术人员的理解:
[0114]
如图1-13所示,图中标记1-4分别表示为:激光光斑1、tls2、目标3、圆木板4。
[0115]
实施例1:如图1-2所示,本实施例涉及一种tls单站点云数据密度严密计算模型,其模型包括:
[0116]
1、令p={pi,i=1,2,..,n}为点云集合,在目标点pi周围半径为r的球形邻域范围内的点云集合可表示为:
[0117]
r(pi,r)={pj/d(pi,pj)≤r,pj∈p and j≠i}
ꢀꢀ
(1);
[0118]
式中:d(pi,pj)为目标点pi至pj的几何距离。则点云集合r(pi,r)中的总点数即为目标点pi的密度,记为d(pi,r)。
[0119]
一般情况下,点云密度定义为半径为r的球形邻域范围内的总点数,其球形邻域体积为但是对于单站tls扫描,被扫描目标只有直接面向tls的部分才能被记录,因此,点云密度的实际计算邻域可近似为半径为r的圆,其面积为πr2。对于具有不同几何特征的目标,当邻域半径r定义为合适的大小时,其点云密度会存在显著的差异。如图1所示,1为激光光斑,图中两物体(圆柱体)的尺寸存在一定差异,半径分别为c1、c2,且c1》c2。若邻域半径r=r1《=c2,即同时小于两物体的尺寸时,两物体的点云密度相同。但是,若c2《r=r2≤c1,即邻域半径大于其中一个物体的寸尺,同时小于另一物体的寸尺时,尺寸较大物体的点云密
度更大,此时可以较好地将二者进行分类。因此,通过定义合适的邻域半径r,点云密度信息可以表征目标的几何尺寸和空间分布形态,用于具有不同几何特征目标的分类、识别等研究。
[0120]
2、tls采用逐线扫描的工作方式,扫描线首先在竖直方向的垂直扫描角范围内进行由下往上(或由上往下)的扫描,以竖直角分辨率β为步长进行离散点测量,然后旋转一个水平角分辨率α后再次进行竖直扫描,直至完成指定的水平扫描角或一个圆周扫描后结束。如图2所示,1为激光光斑,2为tls,3为目标,以tls2的中心o为原点建立三维空间坐标系,由于激光存在固定发散角,在目标表面会形成激光光斑1,但发散角通常远小于α和β,因此可将其影响忽略不计。δohi、δolk和δoqr所在的平面分别为某三个连续竖直扫描平面,这三个平面均与xoy平面垂直,且相邻平面之间的角度间隔(即二面角或者夹角)为α,在单个竖直扫描平面内,由于竖直角分辨率β的存在,使得相邻激光光斑之间存在一定的间距。对于连续相邻的竖直扫描平面,当扫描角相同时,可认为不同竖直扫描平面内的扫描线位于同一平面,且该平面与扫描线所在的竖直扫描平面相互垂直。对于目标表面的微小平面e,点n、p、m具有相同的扫描角,并位于同一直线上,扫描线on、op、om位于同一平面,令δolk所在平面为f,δomn所在平面为g,因此平面f与平面g相互垂直。令平面f与平面e的交线为 m,平面g与平面e的交线为l,扫描线op为两垂直平面f和g的交线,当op 与平面e垂直时,op与平面e内的直线m和l同时垂直,此时直线m和l的夹角为两垂直平面f和g的二面角,故直线m和l的夹角为90
°
。当op仅与直线 m垂直时,由于op为两垂直平面f和g的交线,且直线m位于平面f上,故直线m和平面g垂直,因此直线m与平面g上的直线l亦垂直,其夹角为90
°
。同理,当op仅与直线l垂直时,直线m和l的夹角也为90
°
。当op与直线m 和l均不垂直时,由于op为两垂直平面f和g的交线,此时直线m和l的夹角会大于或者小于平面f和g的二面角,因此其夹角为钝角或锐角。令目标点p所在平面e的法向量为(u,v,w),则扫描线op与该法向量的夹角即为入射角,记为λ,令扫描线op与直线m和l的夹角分别为θ1和θ2,由于目标表面存在各种倾斜的情况,使得一般情况下目标表面的法向量与平面f或g并不共面,即入射角λ与θ1或θ2并非互余的关系,例如将目标绕直线m旋转时,其表面的法向量会发生改变,使得入射角随之变动,但扫描线op、直线m和平面f始终固定不变,即角度θ1固定不变,当且仅当法向量与平面f或g共面,即θ1或θ2其中一个角为 90
°
时,另一个角的余角即为入射角。
[0121]
对于tls而言,点云密度通常会随着距离等因素的变化而改变,表现为近密远疏。该模型的主要思想如下:利用目标点的扫描线所处的竖直扫描平面(平面f)、目标点左右相邻扫描线构成的平面(平面g)分别与目标点所处的微小平面(平面e)相交,求取两相交直线(m和l)的方向向量(s2和s3),再结合目标点的扫描线(直线op)方向向量(s1),可得出目标点扫描线分别与两相交直线的夹角(θ1和θ2),通过三角形正弦定理即可求解出水平和竖直点间距 (δh和δv),进而可得到目标点外围平行四边形的面积(s),最后求取目标点圆形邻域面积与平行四边形面积的比值即可得到点云密度:
[0122][0123]
式中:s为目标点外围平行四边形面积。该模型采用平行四边形来指代激光光斑,可采用如下方式得到:如图2所示,首先将目标点与其周围四邻域点分别通过直线连接,然后分别过四条连接线的中点作垂线,新生成的四条直线所包围的区域为平行四边形,在平
行四边形内包含一个激光光斑。同理,每个激光光斑外围均可形成一个平行四边形,每个平行四边形可代表一个激光点,并且各平行四边形之间紧密相连,无间隙存在。在半径为r的圆形邻域范围内,各平行四边形面积变化十分微小,可近似相等,且等于目标点外围平行四边形的面积。因此,通过式(2)即可计算得到目标点的点云密度。
[0124]
2.1平行四边形面积同目标点与相邻激光光斑的间距有着密切的关系,由图 2可知目标点pi的左右相邻点间距分别为pn、pm,前后(上下)相邻点间距分别为pk、pl。通常pn与pm、pk与pl不相等,相对仪器远端的稍长,仅当扫描线op与目标表面垂直时才相等。由前述分析可得平行四边形的两边长δh 和δv分别为:
[0125][0126]
令目标点p(或pi)的坐标为(xi,yi,zi),仪器(tls)中心o的坐标为(x0,y0,z0),则可得扫描线op所在直线的方向向量s1为:
[0127]
s1=(x
i-x0,y
i-y0,z
i-z0)
ꢀꢀ
(4);
[0128]
假设平面e、f、g的平面方程如下:
[0129][0130]
则平面e与平面f相交直线m的直线方程为:
[0131][0132]
因此可求直线m的方向向量s2为:
[0133][0134]
式中:i=(1,0,0),j=(0,1,0),k=(0,0,1),可得s2为:
[0135]
s2=(b1c
2-b2c1,-a1c2+a2c1,a1b
2-a2b1)
ꢀꢀ
(8);
[0136]
因此,结合式(4)、(8)可得扫描线op与直线m的夹角θ1的余弦值为:
[0137][0138]
则θ1=cos-1
(cosθ1),如图2所示,θ1的计算结果可能为∠opl或∠opk,由于∠opl和∠opk互为补角,任意选取其中一个角作为θ1对于lk的长度计算没有影响,故这里以∠opl作为θ1进行后续计算。在δopl中,由正弦定理可得:
[0139][0140]
式中,为目标点至仪器中心的几何距离。同理,在δopk中,由正弦定理可得:
[0141][0142]
因此,结合式(3)、(10)、(11)可得δv为:
[0143][0144]
平面e与平面g相交直线l的直线方程为:
[0145][0146]
因此可求直线l的方向向量s3为:
[0147][0148]
式中:i=(1,0,0),j=(0,1,0),k=(0,0,1),可得s3为:
[0149]
s3=(b1c
3-b3c1,-a1c3+a3c1,a1b
3-a3b1)
ꢀꢀ
(15);
[0150]
因此,结合式(4)、(15)可得扫描线op与直线l的夹角θ2的余弦值为:
[0151][0152]
则θ2=cos-1
(cosθ2),与θ1的计算方式类似,这里以∠opn作为θ2进行后续计算。在δopn中,由正弦定理可得:
[0153][0154]
在δopm中,由正弦定理可得:
[0155][0156]
因此,结合式(3)、(17)、(18)可得δh为:
[0157][0158]
由图2可知,∠opl、∠opn和∠lpn可看作是以p为顶点的三棱锥的三个顶角,如图2所示,∠opl和∠opn分别为θ1和θ2,∠lpn为直线m和l的夹角,将其设为θ3,由四面体空间角的基本公式可知如下关系式:
[0159]
cosθ1·
cosθ2+sinθ1·
sinθ2·
cosγ=cosθ3ꢀꢀ
(20);
[0160]
式中:γ为平面f和平面g的二面角。由于平面f与平面g垂直,即γ=90
°
,故可将式(20)简化为:
[0161]
cosθ1·
cosθ2=cosθ3ꢀꢀ
(21);
[0162]
则再结合式(12)、(19)可得平行四边形面积s的计算公式为:
[0163][0164]
2.2将式(22)计算的平行四边形面积s代入式(2)中,可得到目标点pi密度计算公式如下:
[0165][0166]
由式(23)可知,点云密度与r、α、β、di、θ1、θ2这6个参数相关。邻域半径r由人为设定,与目标物体尺寸相关,角度分辨率α和β根据实际工作需要进行设定,在单站tls扫描过程中为恒定值。通过观察式(9)、(16)及距离di的计算公式可知,di、θ1、θ2这3个参数主要与平面e、f、g的方程系数、目标点的空间坐标及仪器中心坐标有关,其中,目标点三维空间坐标和仪器中心坐标可直接从tls点云数据中获得,进而可求解出di。
[0167]
2.3平面e为目标点pi所在的平面,通常可利用目标点周围的k个近邻点采用最小二乘法进行拟合,得到平面法向量为(ui,vi,wi),再结合该平面经过目标点pi,可得到平面e的平面方程系数为:
[0168][0169]
由于平面f过点o(x0,y0,z0)和p(xi,yi,zi),且与xoy平面垂直,因此可将其平面方程转化为过(x0,y0)和(xi,yi)的直线方程:
[0170][0171]
由式(25)可得平面f的平面方程系数为:
[0172][0173]
式(26)中值得注意的是:当xi=0时,平面f与yoz平面重合,此时其平面方程系数应为:a2=1,b2=0,c2=0,d2=0。由于平面g与平面f垂直,且过扫描线op,因此通过求取平面f的法向量s4=(a2,b2,c2)与扫描线op方向向量(式(8))的外积,即可得到平面g的法向量s5:
[0174][0175]
式中:i=(1,0,0),j=(0,1,0),k=(0,0,1),可得s5为:
[0176]
s5=((y
i-y0)c
2-(z
i-z0)b2,-(x
i-x0)c2+(z
i-z0)a2,(x
i-x0)b
2-(y
i-y0)a2)
ꢀꢀ
(28) ;
[0177]
结合式(26)可将式(28)简化为:
[0178][0179]
又由于平面g过仪器中心点o,则可得到平面g的平面方程系数为:
[0180][0181]
式(30)中值得注意的是:当xi=0时,平面g与yoz平面垂直,此时其平面方程系数应为:a3=0,b3=z
i-z0,c3=-(y
i-y0),d3=yiz
0-ziy0。通过观察式(24)、(26)和(30)可知平面e、f、g的平面方程系数与目标点的空间坐标、仪器中心坐标和目标点所在平面的法向量有关,这些参数均可在tls 点云数据中得到,因此,将式(24)、(26)和(30)代入式(9)和(16)中可求得θ1和θ2。
[0182]
实施例2:本实施例涉及一种tls单站点云数据密度严密计算模型的校正方法,其校正方法包括:
[0183]
1、由式(23)可知,点云密度与di、θ1和θ2存在一定关系,因此,原始密度数据无法直接用于区分不同几何特征的目标,可通过下式进行校正:
[0184][0185]
式中:dc(pi,r)为目标点pi校正后的密度,d'、θ1'、θ2'分别为参考距离、参考角度θ1、θ2,可任意设定。本实施例设定参考目标点空间坐标为参考目标点所在平面法向量为计算得到d'、θ1'、和θ2'。公式(31)表明dc(pi,r)消除了距离和角度的影响,只与目标的空间几何特征和邻域半径r有关,可用于不同几何特征目标的分类和识别。
[0186]
角度分辨率α和β的数值大小与点云的疏密程度密切相关,在实际工作中,通常将其设置为极小值(如0.05
°
),以获取目标足够密集的点云数据,因此,可将式(23)简化为:
[0187][0188]
进而得到简化后的密度校正公式为:
[0189][0190]
2、对于简化后的密度计算模型(式(32)),当θ1或θ2为90
°
时,可分为以下几种特殊情形:
[0191]
1)θ1和θ2均为90
°
。此时目标点所在微小平面e的法向量与扫描线op重合,即扫描线
repetition rate,prr),分别为30、50、 100和150khz,较小的prr对应更好的测距性能。对于三次室内定量实验,由于圆木板较小,故将水平视场角设置为145
°
—165
°
,竖直视场角设置为80
°
—100
°
即可满足扫描需求,将水平和竖直角度分辨率分别设置为0.02
°
和 0.03
°
,prr固定为30khz。扫描完成后,得到图3所示的点云,需要对圆木板点云进行裁剪并统计其点云数量,这里采用cloudcompare软件进行处理,将圆木板周围的噪声点进行剔除,并严格按照圆木板的几何尺寸进行裁剪。
[0206]
第一个室内实验主要用于验证距离d与点云密度之间关系,将角度θ1和θ2固定不变,不断改变距离d分别进行扫描,可得到不同距离与之对应的点云密度,进而得出距离d与点云密度之间的关系。实验在水平且平坦的地面上进行,如图 4所示,2为tls,4为圆木板,首先将圆木板立于竖直状态并直接面向tls,随后将其分别向上和向左旋转一定角度,以确保角度θ1和θ2为一般情形,最后调整圆木板的中心与tls中心的高度一致(可在实验开始前对地面进行扫描,确定tls中心高度),以确保在每次向前移动圆木板时的θ1和θ2不变。riegl vz-4000 的理论测距范围为5—4000m,距离太近或太远的测量结果均存在较大误差,当距离为50m时,两点之间的间距约为0.03m,本实验中直径为0.2m的圆木板上的点云已十分稀疏,为确保实验结果的准确性,本次实验设置的距离变化范围为8—48.8m,移动间隔为2.4m。每次移动后均进行一次扫描,共得到18次不同距离的扫描数据,扫描点云数据如图5所示。
[0207]
圆木板中心点的角度θ1和θ2可根据式(9)和(16)计算得到,共得到18组互相近似的θ1和θ2,这里分别取其平均值67.49
°
和67.79
°
作为本次实验中的θ1和θ2进行计算。实验结果如图6和图7所示,图6为不同距离的点云密度分布图,横轴表示距离,纵轴表示点云密度,星号代表实验测量的点云密度,曲线为公式 (32)计算的点云密度,圆圈为曲线上相应实验距离的点云密度,图7为模型计算的点云理论密度与实验测量点云实际密度之间的相关性图。可以看出点云理论密度与点云实际密度有着较好的一致性,二者相关系数为0.9997,说明吻合程度较高,计算得到均方根误差rmse为14.37,误差亦较小,说明距离d与点云密度之间的关系同公式(32)相吻合,即点云密度与距离的平方成反比。从图6 可以看出,整体而言,点云密度会随着距离的增大而减小,在前20m时减小的幅度较大,而后减小的较为平缓。由以上实验可看出距离对于点云密度的影响十分显著,若想要得到仅与目标几何相关的校正后的密度,需要对距离效应进行消除。
[0208]
第二个室内实验主要用于验证角度θ1与点云密度之间的关系,将距离d和角度θ2固定不变,不断改变角度θ1分别进行扫描,可得到不同θ1与之对应的点云密度,进而得出角度θ1与点云密度之间的关系。实验在平坦地面上进行,如图8 所示,2为tls,4为圆木板,首先将圆木板放置于距离tls的16m处,并面向tls调整为竖直状态,随后将其向左旋转一定角度,以确保角度θ2为一般情形。圆木板起始为竖直状态,即角度θ1为90
°
,随后绕直线l所在的轴线以5
°
为步长逐步旋转至10
°
,当θ1小于10
°
时,圆木板上仅存在极少数的点,因此在本实验中不做考虑。每次旋转圆木板时均进行一次扫描,该过程中距离d和角度θ2视为常量保持不变,共得到17次不同角度θ1的扫描数据。
[0209]
圆木板中心点的距离可由其三维空间坐标计算得到,角度θ2可根据式(16) 计算得到,共得到17组互相近似的d和θ2,这里分别取其平均值16.03m和 71.96
°
作为本次实验中的d和θ2进行计算。实验结果如图9和图10所示,可以看出通过改变不同的角度θ1所计算的
点云理论密度与实验测量的点云实际密度之间具有较好的一致性,二者的相关系数为0.9990,说明其具有较强的相关性,计算得到均方根误差rmse为11.94,误差亦较小,说明角度θ1与点云密度之间的关系同公式(32)相吻合。从图9可以看出,整体而言,点云密度会随着角度θ1的减小而减小,在90
°
至70
°
时减小的幅度较小,而后以近乎线性的方式持续减小。由以上实验可看出角度θ1对于点云密度的影响十分显著,若想要得到仅与目标几何相关的校正后的密度,需要对角度θ1的影响进行消除。
[0210]
第三个室内实验主要用于验证角度θ2与点云密度之间的关系,将距离d和角度θ1固定不变,不断改变角度θ2分别进行扫描,可得到不同θ2与之对应的点云密度,进而得出角度θ2与点云密度之间的关系。如图11所示,2为tls,4为圆木板,与角度θ1的实验过程相似,不同的是这里将圆木板调整为竖直状态后向上旋转一定角度,以确保角度θ1为一般情形。圆木板初始状态时的θ2为90
°
,然后将圆木板绕直线m所在的轴线以5
°
为步长逐步旋转至10
°
,每次旋转圆木板时均进行一次扫描,该过程中距离d和角度θ1视为常量保持不变,共得到17次不同角度θ2的扫描数据。
[0211]
圆木板中心点的距离可由其三维空间坐标计算得到,角度θ1可根据式(9) 计算得到,共得到17组互相近似的d和θ1,这里分别取其平均值16.01m和 67.32
°
作为本次实验中的d和θ1进行计算。实验结果如图12和图13所示,可以看出改变不同的θ2测量得到的点云实际密度与模型计算的理论密度之间有着较好的一致性,二者相关系数为0.9985,相关性较强,计算得到均方根误差rmse 为10.33,误差亦较小,说明说明角度θ2与点云密度之间的关系同公式(32)相吻合。从图12可以看出,整体而言,点云密度随角度θ2改变的变化趋势与角度θ1几乎一致,说明角度θ2对点云密度的影响也十分显著,若想要得到仅与目标几何相关的校正后的密度,需要对角度θ2的影响进行消除。
[0212]
通过以上三次实验分别验证了点云理论密度计算模型中的三个变量d、θ1和θ2与点云密度之间的关系,根据实验结果可以看出,点云理论密度计算模型的计算结果与真实的点云密度之间具有较好的相关性和一致性,二者之间仅存在较小的误差,说明该模型能够较好的表达真实的点云密度变化。通过以上实验也可看以出点云密度会随着三个变量d、θ1和θ2的改变而产生不同的变化趋势,因此需要同时对这个三个变量的影响进行消除,得到校正后的点云。密度才能更好的用于不同几何特征目标的识别、分类和提取等研究中。
[0213]
综上所述,本实施例从数学上推导了tls单站点云理论密度的严密计算模型,并通过定义参考距离和角度,提出一种tls单站点云密度的校正方法,通过消除距离、角度等客观因素的影响,得到仅与目标的几何尺寸/特征相关的校正后的点云密度。通过室内定量实验分别验证了模型中的距离d、角度θ1和θ2这三个变量与点云密度之间的关系,其相关系数均达到0.99,均方根误差rmse 亦非常小,说明该理论密度模型能够较好的表达真实的点云密度变化。同时,该模型可适用于各种类型的tls扫描系统,并且无需知道角度分辨率,具有较强的适用性和鲁棒性。通过设定合适的邻域半径r,利用点云密度校正模型对原始点云密度进行校正,可将其用于目标的分类、识别和提取等研究。未来可尝试将此方法用于单站tls扫描数据的语义分割研究中,如植被茎叶分离、城市杆状物提取、单木分割等,可用于进一步提高目标分类、识别和提取的准确度。
[0214]
虽然以上实施例已经参照附图对本发明目的的构思和实施例做了详细说明,但本领域普通技术人员可以认识到,在没有脱离权利要求限定范围的前提条件下,仍然可以对
本发明作出各种改进和变换,故在此不一一赘述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1