一种垃圾桶位移监测方法与流程
1.本发明涉及环卫设备管理技术领域,具体涉及一种垃圾桶位移监测方法。
背景技术:
2.随着经济社会发展、城市规模扩大,生活垃圾和工业垃圾也不断增加,当今社会对于垃圾的处理方法越来越重视,一方面是要实现垃圾的无害化处理,避免对环境造成污染,另一方面希望对垃圾尽可能地再生利用,实现资源的可持续利用。要实现前述目标,对于垃圾的集中收集是第一步;而垃圾桶正是实现垃圾集中的最基础也是最重要的设施之一。目前,垃圾桶在使用过程中,特别是在一些公共场所,一些垃圾桶的摆放位置是预先设计好的,只能放置于固定区域,不能随意移动位置,以免影响美观或对行人造成不便;甚至有一些垃圾桶的造型美观,工艺及材料价值较高,还容易出现被人盗走的情况。现有技术中,对于垃圾桶摆放位置及被盗情况的检查主要是通过工作人员进行定期实地巡查或者通过摄像头远程监控,实地巡查的方式耗时耗力,成本较大,而采用摄像头远程监控则需要工作人员实时对摄像头传来的图像进行人工检查,当监控的垃圾箱数量较多时,工作人员长时间工作后易疲劳,容易出现漏判或错判。
3.鉴于此,本技术旨在提供一种可以对垃圾桶的位置进行监测的方法,使用该方法可以快速、自动地判断垃圾桶的位置是否发生位移,减轻工作人员的工作量。
技术实现要素:
4.本发明的目的是克服现有技术的上述不足而提供一种垃圾桶位移监测方法,利用方法可以快速、自动地判断垃圾桶的位置是否发生位移。
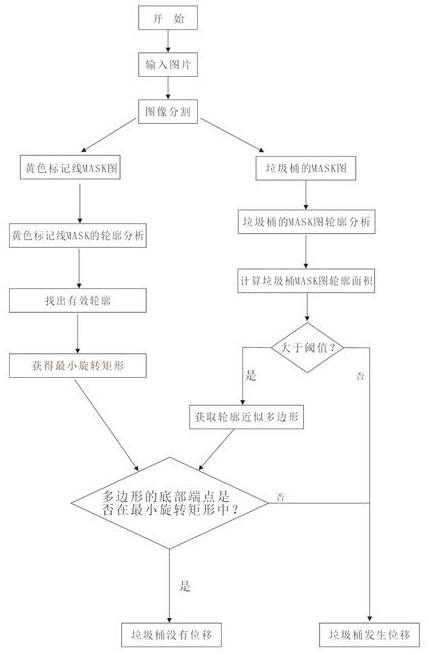
5.本发明的技术方案是:一种垃圾桶位移监测方法,包括如下步骤:s1、输入垃圾桶图片;s2、对s1得到的图片进行分割处理,分别得到垃圾桶的mask图和区域线的mask图,并且分别记作a和b;s3、获取a的轮廓特征,判断a的面积s是否大于阈值z,如果s大于z,则说明图片内有垃圾桶,反之,若s小于z,则表示垃圾桶发生了移位;s4、当s大于z的情况下,再对b进行分析,获取b的轮廓特征,得到b的中心点位置,计算b的中心点位置与a的中心点位置间的距离h,对h的数值进行判断,若h满足预先设定的取值范围,则说明得到的b的轮廓为有效轮廓;s5、对上一步得到的有效轮廓的面积进行排序,找到最大面积轮廓数据,并且在最大面积轮廓中找到最小的旋转矩形c。
6.s6、对a进行多边形近似处理,得到a的近似多边形,并且获取该近似多边形的边界顶点,判断近似多边形的边界顶点中的下端顶点是否均落在c的范围内;若下端顶点均落在c的范围内,则说明垃圾桶在指定范围内,反之,只要有一个下端顶点落在c的范围外,则表明垃圾桶不在指定范围内。
7.进一步的,在步骤s1中,输入的图片为摄像头实时采集的图片,在建模阶段,采集的图片。
8.进一步的,在步骤s2中,利用unet分割算法对图片进行分割处理。
9.进一步的,在步骤s3中,通过opencv获取a的轮廓,在步骤s4中,通过opencv获取b的轮廓,以及获取a和b的中心。
10.进一步的,在步骤s3中,阈值z设定为1000像素。该阈值z根据垃圾桶的和区域的大小综合决定,根据多次实验后确定阈值设为1000像素时监测效果最优。
11.进一步的,在步骤s4中,所述h预先设定的取值范围是:x方向的距离小于300像素,y方向的距离大于0像素。本技术中,将x方向的距离设定为300像素,可以有效排除其它的地标线(不是区域线),从而找出有效的区域线。
12.进一步的,在步骤s6中,采用douglas-peucker算法实现对a的多边形近似处理。
13.进一步的,在步骤s6中,通过opencv获取a的多边形边界顶点。
14.进一步的,在步骤s6中,所述近似多边形的边界顶点有4个,其中上端顶点与下端顶点各有2个。
15.与现有技术相比本发明的有益效果:现有技术中采用的连续对指定区域使用摄像头拍照纪录或使用摄像头录影的监测方式,需要由人工从图像中分辨出异常情况,工作量巨大,效率很低;事后查证难免延误处理的最佳时间,及时性差。而本发明提供的垃圾桶位移监测方法,可以快速、自动地判断垃圾桶的位置是否发生位移,极大的减少了工作人员的工作负担,特别适合应用于地铁站等对垃圾桶的位置有严格要求的公共场所。
附图说明
16.图1是本发明实施例1的流程图;图2是本发明实施例1中垃圾桶没有位移的示意图;图3是本发明实施例1中垃圾桶有位移的示意图;图中,1-垃圾桶,2-区域线。
具体实施方式
17.以下将结合具体实施例对本发明做进一步详细说明,实施例中未具体说明的方法或功能部件均为现有技术。
18.实施例1如图1所示,本发明中的垃圾桶位移监测方法,应用于地铁站,其包括以下流程步骤:s1、输入垃圾桶图片;采用摄像头实时采集的图片。
19.s2、对上一步得到的图片进行分割处理,分别得到垃圾桶1的mask图和区域线2(即地铁中的黄色标记线)的mask图,并且分别记作a和b。
20.本实施例中,利用unet分割算法对图片进行分割处理,unet是最常用、也是最简单的一种分割模型,它简单、高效、易懂、容易构建、可以从小数据集中训练。unet的具体特点包括:1、 网络结构简单,呈现u型对称结构,左侧是卷积层,右侧是上采样层。2、实现了不同scale下feature的融合,提高模型的结果精确度,3、能在少量的数据集中得到很好的效果。
21.s3、获取a的轮廓特征,判断a的面积s是否大于阈值z,如果s大于z,则说明图片内有垃圾桶,反之,若s小于z,则可直接判定垃圾桶发生了位移,即不在指定区域。
22.本实施例中,利用opencv获取a的轮廓特征,本文中的轮廓可以简单地理解为连接所有具有相同的颜色或强度的连续点(沿着边界)的曲线;轮廓特征包括面积、周长、质心和边界框等;面积:是指每个轮廓中所有的像素点围成区域的面积,单位为像素;周长:是指每个轮廓中所有像素点围成区域的周长,单位同样为像素;质心:是指轮廓的中心点位置;本实施例中,阈值z设置为1000像素。
23.s4、当s大于z的情况下,再对b进行分析,获取b的轮廓,得到b的中心点位置,计算b的中心点位置与a的中心点位置间的距离h,对h的数值进行判断,若h满足预先设定的取值范围,则说明得到的b的轮廓为有效轮廓;本实施例中,h预先设定的取值范围是:x方向的距离小于300像素,y方向的距离大于0像素。
24.s5、对上一步得到的有效轮廓的面积进行排序,找到最大面积轮廓数据,并且在最大面积轮廓中找到最小的旋转矩形c,选择最小旋转矩形是因为最小旋转矩形c可以取到最接近垃圾桶边缘的位置点。
25.s6、对a进行多边形近似处理,得到a的近似多边形,并且获取该近似多边形的边界顶点,判断近似多边形的边界顶点中的下端顶点是否均落在c的范围内;若下端顶点均落在c的范围内,则说明垃圾桶在指定范围内,反之,只要有一个下端顶点落在c的范围外,则表明垃圾桶不在指定范围内。
26.在本实施例中,采用douglas-peucker算法实现对a的多边形近似处理,通过opencv获取a的多边形边界顶点。多边形近似处理为现有技术,不作赘述。
27.在本实施例中,该近似多边形为四边形,其边界顶点有4个,分别为a、b、c、d,其中a、b为上端顶点,c、d为下端顶点。即只要c、d两点均在c的范围内,即表明垃圾桶没有发生位移。
28.以上仅为本发明的部分实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有前述各种技术特征的组合和变型,本领域的技术人员在不脱离本发明的精神和范围的前提下,对本发明的改进、变型、等同替换,或者将本发明的结构或方法用于其它领域以取得同样的效果,都属于本发明包括的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1