风浪数值模拟方法与流程
1.本发明涉及自然环境模拟技术领域,具体而言,涉及一种风浪数值模拟方法,适用于透空的码头结构。
背景技术:
2.随着经济全球化,水运事业得到了快速的发展,建港水平显著提高。在进行港口的设计和施工过程中,常需要通过数值模拟的方法得到近岸及码头附近的波浪要素,而建立全球的波浪模型可以方便、快捷的得到工程海域的波浪状况,为港口工程的设计和施工提供波浪参数,并给近岸及港内波浪模型提供波浪边界条件。
3.通常使用近岸波浪模型(mike21_sw模型)。mike21_sw模型是典型的风浪谱模型,适用于近海,无法模拟港池内的折射及浅水变形等物理现象,因此对受风浪影响的码头,港池内部的波浪模拟结果精度较低,且不适用于透空的码头结构的模拟。
技术实现要素:
4.本发明的主要目的在于提供一种风浪数值模拟方法,以解决相关技术中的对受风浪影响的码头,港池内部透空的码头结构的波浪模拟结果精度较低的问题。
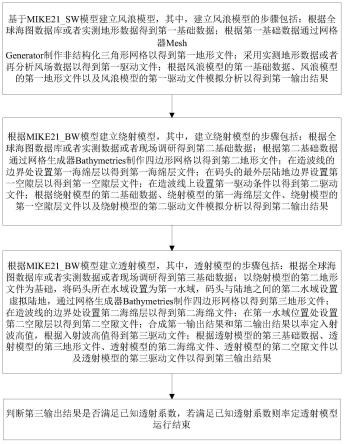
5.为了实现上述目的,本发明提供了一种风浪数值模拟方法,包括以下步骤:基于mike21_sw模型建立风浪模型,其中,建立风浪模型的步骤包括:根据全球海图数据库或者实测地形数据得到第一基础数据;根据第一基础数据通过网格器mesh generator制作非结构化三角形网格以得到第一地形文件;采用实测地形数据或者再分析风场数据以得到第一驱动文件;根据风浪模型的第一基础数据、风浪模型的第一地形文件以及风浪模型的第一驱动文件模拟分析以得到第一输出结果;根据mike21_bw模型建立绕射模型,其中,建立绕射模型的步骤包括:根据全球海图数据库或者实测数据或者现场调研得到第二基础数据;根据第二基础数据通过网格生成器bathymetries制作四边形网格以得到第二地形文件;在造波线的边界处设置第一海绵层以得到第一海绵层文件;在码头的最外层陆地边界设置第一空隙层以得到第一空隙层文件;在造波线上设置第一驱动条件以得到第二驱动文件;根据绕射模型的第二基础数据、绕射模型的第一海绵层文件、绕射模型的第一空隙层文件以及绕射模型的第二驱动文件模拟分析以得到第二输出结果;根据mike21_bw模型建立透射模型,其中,透射模型的步骤包括:根据全球海图数据库或者实测数据或者现场调研得到第三基础数据;以绕射模型的第二地形文件为基础,将码头所在水域设置为第一水域,码头与陆地之间的第二水域设置虚拟陆地,通过网格生成器bathymetries制作四边形网格以得到第三地形文件;在造波线的边界处设置第二海绵层以得到第二海绵文件;在第一水域位置处设置第二空隙层以得到第二空隙文件;合成第一输出结果和第二输出结果以率定入射波高值,根据入射波高值得到第三驱动文件;根据透射模型的第三基础数据、透射模型的第三地形文件、透射模型的第二海绵文件、透射模型的第二空隙文件以及透射模型的第三驱动文件以得到第三输出结果;判断第三输出结果是否满足已知透射系数,若满足已知透射系
数则率定透射模型运行结束。
6.进一步地,在判断第三输出结果是否满足已知透射系数的步骤中,若不满足已知透射系数,调节第二空隙文件中的第二空隙层的数值以得到第n空隙文件,其中,n为大于2的正整数,透射模型根据第三基础数据、第三地形文件、第二海绵文件、第n空隙文件以及第三驱动文件以得到第输出结果,再判断第输出结果是否满足已知透射系数,直到第输出结果满足已知透射系数。
7.进一步地,在调节第二空隙文件中的第二空隙层的数值的步骤中,调节第二空隙文件中的第二空隙层的数值的范围在0.2至1之间。
8.进一步地,在合成第一输出结果和第二输出结果以率定入射波高值的步骤中,风浪数值模拟方法还包括以下步骤:合成第一输出结果和第二输出结果以得到合成波高值,判断入射波高值是否满足合成波高值,若满足合成波高值则率定入射波高值运行结束,若不满足合成波高值,调节入射波高值的数值以得到第m驱动文件,其中,m为大于3的正整数,透射模型根据第三基础数据、第三地形文件、第二海绵文件、第n空隙文件以及第m驱动文件以得到第(m+1)输出结果,再判断第(m+1)输出结果是否满足合成波高值,直到第(m+1)输出结果满足合成波高值。
9.进一步地,在合成第一输出结果和第二输出结果以得到合成波高值的步骤中:第一输出结果、第二输出结果以及合成波高值之间满足:其中,a为港口口门外侧参考点p处的第一输出结果,b为港口口门外侧参考点p处的第二输出结果,c为合成波高值。
10.进一步地,已知透射系数的范围在0至1之间。
11.进一步地,风浪数值模拟方法还包括以下步骤:在第三输出结果满足已知透射系数的步骤之后,合成第一输出结果、第二输出结果以及第三输出结果以得到最终的波浪结果。
12.进一步地,在合成第一输出结果、第二输出结果以及第三输出结果以得到最终的波浪结果的步骤中,第一输出结果、第二输出结果、第三输出结果以及最终的波浪结果之间满足:其中,a为港口口门外侧参考点p处的第一输出结果,b为港口口门外侧参考点p处的第二输出结果,d为第三输出结果,e为最终的波浪结果。
13.进一步地,风场数据包括cfsr/cfsrv2数据。
14.进一步地,在以绕射模型的第二地形文件为基础,将码头所在水域设置为第一水域,码头与陆地之间的第二水域设置虚拟陆地的步骤中,第一水域将虚拟陆地分隔成第一区域和第二区域,以使第二区域的面积大于第一区域的面积。
15.应用本发明的技术方案,风浪数值模拟方法包括以下步骤:基于mike21_sw模型建立风浪模型,其中,建立风浪模型的步骤包括:根据全球海图数据库或者实测地形数据得到第一基础数据;根据第一基础数据通过网格器mesh generator制作非结构化三角形网格以得到第一地形文件;采用实测地形数据或者再分析风场数据以得到第一驱动文件;根据风浪模型的第一基础数据、风浪模型的第一地形文件以及风浪模型的第一驱动文件模拟分析以得到第一输出结果。根据mike21_bw模型建立绕射模型,其中,建立绕射模型的步骤包括:根据全球海图数据库或者实测数据或者现场调研得到第二基础数据;根据第二基础数据通
过网格生成器bathymetries制作四边形网格以得到第二地形文件;在造波线的边界处设置第一海绵层以得到第一海绵层文件;在码头的最外层陆地边界设置第一空隙层以得到第一空隙层文件;在造波线上设置第一驱动条件以得到第二驱动文件;根据绕射模型的第二基础数据、绕射模型的第一海绵层文件、绕射模型的第一空隙层文件以及绕射模型的第二驱动文件模拟分析以得到第二输出结果。根据mike21_bw模型建立透射模型,其中,透射模型的步骤包括:根据全球海图数据库或者实测数据或者现场调研得到第三基础数据;以绕射模型的第二地形文件为基础,将码头所在水域设置为第一水域,码头与陆地之间的第二水域设置虚拟陆地,通过网格生成器bathymetries制作四边形网格以得到第三地形文件;在造波线的边界处设置第二海绵层以得到第二海绵文件;在第一水域位置处设置第二空隙层以得到第二空隙文件;合成第一输出结果和第二输出结果以率定入射波高值,根据入射波高值得到第三驱动文件;根据透射模型的第三基础数据、透射模型的第三地形文件、透射模型的第二海绵文件、透射模型的第二空隙文件以及透射模型的第三驱动文件以得到第三输出结果。判断第三输出结果是否满足已知透射系数,若满足已知透射系数则率定透射模型运行结束。这样,仅适用于透空的码头结构(如桩基结构或墩式结构或异型结构),通过mike21_sw模型建立风浪模型,计算得到mike21_bw模型建立的透射模型中所需要的第一输出结果,再计算得到mike21_bw模型建立的透射模型中所需要的第二输出结果。并根据包括得到第一输出结果和第二输出结果步骤的方法,使通过mike21_bw模型建立的透射模型模拟分析得到第三输出结果与已知透射系数进行比较,进而得到港内波浪条件。由于采用mike21_sw模型和mike21_bw模型相结合的方式使得风浪数值模拟方法获得的数据更加准确,提高了港池内部的波浪模拟结果的精度。因此,本技术的技术方案能够解决相关技术中的对受风浪影响的码头,港池内部透空的码头结构的波浪模拟结果精度较低的问题。
附图说明
16.构成本技术的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
17.图1示出了根据本发明的风浪数值模拟方法的实施例的流程图;
18.图2示出了图1的风浪数值模拟方法的原理图;
19.图3示出了图1的风浪数值模拟方法的码头位于陆地和第二水域之间的示意图;
20.图4示出了图1的风浪数值模拟方法的码头位于第一水域和第二水域的示意图。
21.其中,上述附图包括以下附图标记:
22.1、陆地;2、码头;4、第一海绵层文件;5、造波线;6、第二海绵层;7、第二水域;8、第一水域;p、港口口门外侧参考点。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本发明及其应用或使用的任何限制。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
25.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本发明的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
26.如图1至图4所示,本实施例的风浪数值模拟方法包括以下步骤:基于mike21_sw模型建立风浪模型,其中,建立风浪模型的步骤包括:根据全球海图数据库或者实测地形数据得到第一基础数据;根据第一基础数据通过网格器mesh generator制作非结构化三角形网格以得到第一地形文件;采用实测地形数据或者再分析风场数据以得到第一驱动文件;根据风浪模型的第一基础数据、风浪模型的第一地形文件以及风浪模型的第一驱动文件模拟分析以得到第一输出结果。根据mike21_bw模型建立绕射模型,其中,建立绕射模型的步骤包括:根据全球海图数据库或者实测数据或者现场调研得到第二基础数据;根据第二基础数据通过网格生成器bathymetries制作四边形网格以得到第二地形文件;在造波线5的边界处设置第一海绵层以得到第一海绵层文件4;在码头2的最外层陆地边界设置第一空隙层以得到第一空隙层文件;在造波线5上设置第一驱动条件以得到第二驱动文件;根据绕射模型的第二基础数据、绕射模型的第一海绵层文件4、绕射模型的第一空隙层文件以及绕射模型的第二驱动文件模拟分析以得到第二输出结果。根据mike21_bw模型建立透射模型,其中,透射模型的步骤包括:根据全球海图数据库或者实测数据或者现场调研得到第三基础数据;以绕射模型的第二地形文件为基础,将码头2所在水域设置为第一水域8,码头2与陆地1之间的第二水域7设置虚拟陆地3,通过网格生成器bathymetries制作四边形网格以得到第三地形文件;在造波线5的边界处设置第二海绵层6以得到第二海绵文件;在第一水域8位置处设置第二空隙层以得到第二空隙文件;合成第一输出结果和第二输出结果以率定入射波高值,根据入射波高值得到第三驱动文件;根据透射模型的第三基础数据、透射模型的第三地形文件、透射模型的第二海绵文件、透射模型的第二空隙文件以及透射模型的第三驱动文件以得到第三输出结果。判断第三输出结果是否满足已知透射系数,若满足已知透射系数则率定透射模型运行结束。
27.应用本实施例的技术方案,根据透射模型的第三基础数据、透射模型的第三地形文件、透射模型的第二海绵文件、透射模型的第二空隙文件以及透射模型的第三驱动文件以得到第三输出结果;判断第三输出结果是否满足已知透射系数,若满足已知透射系数则率定透射模型运行结束。这样,仅适用于透空的码头结构(如桩基结构或墩式结构或异型结构),通过mike21_sw模型建立风浪模型,计算得到mike21_bw模型建立的透射模型中所需要的第一输出结果,再计算得到mike21_bw模型建立的透射模型中所需要的第二输出结果。并
根据包括得到第一输出结果和第二输出结果步骤的方法,使通过mike21_bw模型建立的透射模型模拟分析得到第三输出结果与已知透射系数进行比较,进而得到港内波浪条件。由于采用mike21_sw模型和mike21_bw模型相结合的方式使得风浪数值模拟方法获得的数据更加准确,提高了港池内部的波浪模拟结果的精度。因此,本实施例的技术方案能够解决相关技术中的对受风浪影响的码头,港池内部透空的码头结构的波浪模拟结果精度较低的问题。上述的实测数据包括测量地形数据及通过波浪观测站测得的波浪数据,包括波高、波周期和波向。上述的第一海绵文件和第二海绵文件均能够吸收多余波能。第一空隙文件和第二空隙文件均能够反映波浪透射或反射的强弱。
28.上述的第一输出结果包括输出波浪场、点的波浪值或时间序列;第二输出结果包括输出波浪场、点的波浪值;第三输出结果为提取港口口门处波高及港内码头2关键点位的波高值。其中,关键点位是指船舶停靠码头2所在水域或受风浪影响较大的港口结构前的水域。
29.需要说明的是,上述的第一基础数据、第二基础数据、第三基础数据的获取及本技术中的其他相关数据可以参考中国发明专利申请的申请公开号为cn108920877a的一种基于mike21-sw模型的全球波浪数值模拟方法中公开的相关的内容。
30.如图1至图4所示,在判断第三输出结果是否满足已知透射系数的步骤中,若不满足已知透射系数,调节第二空隙文件中的第二空隙层的数值以得到第n空隙文件,其中,n为大于2的正整数,透射模型根据第三基础数据、第三地形文件、第二海绵文件、第n空隙文件以及第三驱动文件以得到第(n+1)输出结果,再判断第(n+1)输出结果是否满足已知透射系数,直到第(n+1)输出结果满足已知透射系数。这样,能够较快地使第(n+1)输出结果满足已知透射系数。需要说明的是,第(n+1)输出结果是否满足已知透射系数是指第(n+1)输出结果与已知透射系数的比值是否等于1。
31.如图1至图4所示,为了便于选取第二空隙文件中的第二空隙层的数值,在调节第二空隙文件中的第二空隙层的数值的步骤中,调节第二空隙文件中的第二空隙层的数值的范围在0.2至1之间。
32.如图1至图4所示,为了准确地率定入射波高值,在合成第一输出结果和第二输出结果以率定入射波高值的步骤中,风浪数值模拟方法还包括以下步骤:合成第一输出结果和第二输出结果以得到合成波高值,判断入射波高值是否满足合成波高值,若满足合成波高值则率定入射波高值运行结束,若不满足合成波高值,调节入射波高值的数值以得到第m驱动文件,其中,m为大于3的正整数,透射模型根据第三基础数据、第三地形文件、第二海绵文件、第n空隙文件以及第m驱动文件以得到第(m+1)输出结果,再判断第(m+1)输出结果是否满足合成波高值,直到第(m+1)输出结果满足合成波高值。需要说明的是,入射波高值是否满足合成波高值是指入射波高值与合成波高值的比值是否等于1。第(m+1)输出结果是否满足合成波高值是指第(m+1)输出结果与合成波高值的比值是否等于1。
33.如图1至图4所示,为了准确地率定入射波高值,在合成第一输出结果和第二输出结果以得到合成波高值的步骤中:第一输出结果、第二输出结果以及合成波高值之间满足:其中,a为港口口门外侧参考点p处的第一输出结果,b为港口口门外侧参考点p处的第二输出结果,c为合成波高值。
34.如图1至图4所示,为了较快地选取已知透射系数,已知透射系数的范围在0至1之
间。
35.如图1至图4所示,为了有利于得到最终的波浪结果,风浪数值模拟方法还包括以下步骤:在第三输出结果满足已知透射系数的步骤之后,合成第一输出结果、第二输出结果以及第三输出结果以得到最终的波浪结果。
36.如图1至图4所示,在合成第一输出结果、第二输出结果以及第三输出结果以得到最终的波浪结果的步骤中,第一输出结果、第二输出结果、第三输出结果以及最终的波浪结果之间满足:其中,a为港口口门外侧参考点p处的第一输出结果,b为港口口门外侧参考点p处的第二输出结果,d为第三输出结果,e为最终的波浪结果。这样,综合考虑了波浪的绕射、风浪及透射的影响,得到较高精度港内的波浪条件。
37.如图1至图4所示,为了风浪数值模拟方法能够收集到更加准确的数据,风场数据包括cfsr/cfsrv2数据。上述的cfsr/cfsrv2数据(the ncep climate forecast system reanalysis(version 2)),由ncep的全球气候预报系统cfs生成,从2011年4月开始cfs升级到cfsv2,相应的cfsr也升级为cfsrv2。目前已实现业务化预报。cfsr/cfsrv2数据的时间范围从1979.01开始至今。对不同的变量空间和时间分辨率不同,全球大气分辨率约为38km(0.3
°
),垂直方向分64层,至0.26hpa;全球海洋在赤道分辨率为0.25
°
,超出热带区域后扩大为0.5
°
,垂直方向有40层,至4737m深。时间分辨率上,有6小时再分析场和1小时预报场。cfsr/cfsrv2数据提供的空间分辨率有0.3
°
、0.5
°
、1
°
、2.5
°
,时间分辨率有1h、6h。
38.如图1至图4所示,为了风浪数值模拟方法进行模拟分析的更加准确,在以绕射模型的第二地形文件为基础,将码头2所在水域设置为第一水域8,码头2与陆地1之间的第二水域7设置虚拟陆地3的步骤中,第一水域8将虚拟陆地3分隔成第一区域和第二区域,以使第二区域的面积大于第一区域的面积。
39.在本发明的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
40.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
41.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
42.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修
改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1