一种基于隐马尔科夫模型的群目标动态行为识别方法
1.本发明属于群目标识别领域,涉及群目标队形识别、群目标行为定量描述、群目标行为分析技术,具体涉及一种基于隐马尔科夫模型的群目标动态行为识别方法。
背景技术:
2.舰船在完成其使命时,为达到一定的效果,往往组成编队,如战斗编队、运输船编队,以集中兵力达到预期的目的。舰艇编队有适于各种战斗的队形,例如纵队、横队、人字队等,是各种任务编队的基础。舰艇编队是集中兵力的具体体现,效果明显。根据战场作战态势,对敌方编队进行正确识别以及预测,抓住敌方变换队形之机发起攻击,对我方舰艇进行合理编组、合适的队形、灵活的指挥、熟练的机动来达到最佳作战效果。
3.在未来的战争中,随着武器装备越来越精良,舰艇编队规模将呈现缩小的趋势,舰艇进行战斗时,队形将更为疏散,机动将更加灵活。为提高舰船快速反应能力,航行队形与战斗队形逐渐趋向一致。海战的阵型使用得当能发挥整体优势,对敌方阵型进行分析,抓住敌方阵型变换之机,找到攻击点,实现战局突破。
4.编队用于集中兵力,队形则是解决发挥火力的必要形式。群目标行为对群目标的队形具有一定的依赖性,对群目标的标准队形进行定量描述和分析,并以此为基础,对群目标的行为进行分析识别。
技术实现要素:
5.发明目的:为了解决现有的群目标行为识别多采用模板匹配、贝叶斯网络、基于专家知识的行为识别等,群目标行为识别存在过于依赖专家知识,不具有动态分析的实时性的问题,提供一种基于隐马尔科夫模型的群目标动态行为识别方法,实现群目标行为的连续动态分析识别、获取战场态势;基于阿基米德螺旋线系数,建立标准群目标队形和群目标行为之间的关系概率矩阵和群目标行为状态集的状态转移矩阵,构建隐马尔科夫模型实现对群目标行为进行定量识别分析的目的。
6.技术方案:为实现上述目的,本发明提供一种基于隐马尔科夫模型的群目标动态行为识别方法,包括如下步骤:
7.s1:根据群目标实时动态位置坐标信息数据,计算群目标所有标准队形的阿基米德螺旋线系数;
8.s2:确定群目标的行为状态集;
9.s3:根据群目标的行为状态集,构建群目标行为状态转移概率矩阵和群目标队形变换观测概率矩阵;
10.s4:根据群目标行为状态转移概率矩阵和群目标队形变换观测概率矩阵,构建用于连续时间序列的群目标行为分析的隐马尔科夫模型;
11.s5:获取一个群目标连续帧的位置坐标,计算群目标每一帧的阿基米德螺旋线系数,得到阿基米德螺旋线系数序列;
12.s6:将获取的阿基米德螺旋线系数序列,作为观测序列带入隐马尔科夫模型,推断群目标的行为,对群目标行为进行定量分析识别。
13.进一步地,所述步骤s1具体包括如下步骤:
14.a1:确定群目标的经典标准队形,例如,横队、纵队、楔形队,梯形队等;
15.a2:获取各个队形的横纵坐标信息;
16.a3:计算各个经典标准群目标队形的阿基米德螺旋线系数。
17.进一步地,所述步骤a3中阿基米德螺旋线系数的计算方法为:
18.b1:将(x,y)坐标转换为极坐标(ρ,θ);
19.b2:计算群目标内每个对象的阿基米德螺旋线系数,计算公式为:
20.a=(ρ
1-ρ2)/(θ
1-θ2+2*pi)
21.其中pi的取值为π,其中(ρ1,θ1)为一个群目标内某一对象的极坐标,(ρ2,θ2)为一个群目标内某另一对象的极坐标;
22.b3:对群目标内两两对象之间的阿基米德螺旋线系数取平均值,作为群目标该时刻最终的阿基米德螺旋线系数。
23.进一步地,所述步骤s2中群目标的行为状态集包括攻击行为、护航行为、防御行为、掩护行为和撤退行为。
24.进一步地,所述步骤s3中群目标行为状态转移概率矩阵的构建方法为:
25.c1:为群目标构建一个m*m大小的状态转移矩阵a,其中,m为要研究的群目标的行为的个数;
26.c2:利用历史经验数据确定群目标从行为e到行为f的概率值,确定群目标从行为e到行为f的概率值,并存入状态转移矩阵对应的位置中,例如,p
12
为从行为一到行为二的状态转移概率值。
27.进一步地,所述步骤s3中群目标队形变换观测概率矩阵的构建方法为:
28.d1:为群目标构建一个m*n大小的观测概率矩阵b,其中,m为要研究的群目标的行为的个数,n为要研究的群目标的经典标准队形的个数;
29.d2:利用历史经验数据确定群目标要实现行为e的目的,群目标可能处于的各个经典标准队形的概率值,并存入观测概率矩阵对应的位置,例如,p
12
代表群目标完成行为一时所处的队形为队形二的概率值。
30.进一步地,所述步骤s4中构建的隐马尔科夫模型隐马尔科夫模型由隐含状态链、观测链、状态转移矩阵a、观测概率矩阵b和初始状态链构成;
31.隐马尔科夫模型隐含状态链为群目标的行为状态集;隐马尔科夫模型的观测链为群目标队形阿基米德螺旋线系数序列。
32.进一步地,所述步骤s6具体为:
33.e1:群目标行为状态转移矩阵a和群目标队形变换观测概率矩阵b构成了由标准队形阿基米德螺旋线系数到群目标行为的映射概率关系,具体矩阵公式形式如下:
34.映射关系:a
·
b;
35.e2:基于映射关系,从观测链中的阿基米德螺旋线系数信息推断出群目标行为,完成群目标的行为识别结果。
36.有益效果:本发明与现有技术相比,实现了群目标行为的连续动态分析识别、获取
战场态势,解决了现有的群目标行为识别存在过于依赖专家知识,不具有动态分析的实时性的问题;基于阿基米德螺旋线系数,建立标准群目标队形和群目标行为之间的关系概率矩阵和群目标行为状态集的状态转移矩阵,构建隐马尔科夫模型实现对群目标行为进行定量识别分析的目的。
附图说明
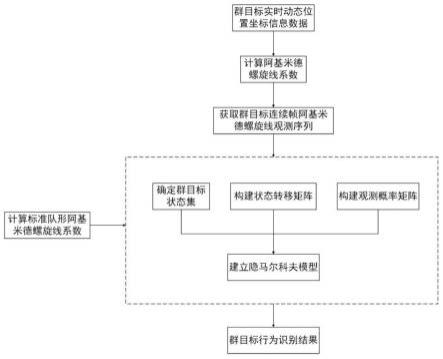
37.图1是本发明的整体流程图;
38.图2是某舰船群目标连续55帧的阿基米德螺旋线动态变化图;
39.图3是某舰船群55帧时间段内某几个时刻的舰船群行为识别结果图。
具体实施方式
40.下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
41.本发明提供一种基于隐马尔科夫模型的群目标动态行为识别方法,如图1所示,包括如下步骤:
42.s1:根据群目标实时动态位置坐标信息数据,计算群目标所有标准队形的阿基米德螺旋线系数,具体包括如下步骤:
43.a1:确定群目标的经典标准队形,例如,横队、纵队、楔形队,梯形队等;
44.a2:获取各个队形的横纵坐标信息;
45.a3:计算各个经典标准群目标队形的阿基米德螺旋线系数,计算方法为:
46.b1:将(x,y)坐标转换为极坐标(ρ,θ);
47.b2:计算群目标内每个对象的阿基米德螺旋线系数,计算公式为:
48.a=(ρ
1-ρ2)/(θ
1-θ2+2*pi)
49.其中pi的取值为π,其中(ρ1,θ1)为一个群目标内某一对象的极坐标,(ρ2,θ2)为一个群目标内某另一对象的极坐标;
50.b3:对群目标内两两对象之间的阿基米德螺旋线系数取平均值,作为群目标该时刻最终的阿基米德螺旋线系数。
51.s2:确定群目标的行为状态集:
52.群目标的行为状态集包括攻击行为、护航行为、防御行为、掩护行为和撤退行为。
53.s3:根据群目标的行为状态集,构建群目标行为状态转移概率矩阵和群目标队形变换观测概率矩阵:
54.群目标行为状态转移概率矩阵的构建方法为:
55.c1:为群目标构建一个m*m大小的状态转移矩阵a,其中,m为要研究的群目标的行为的个数;
56.c2:利用历史经验数据确定群目标从行为e到行为f的概率值,确定群目标从行为e到行为f的概率值,并存入状态转移矩阵对应的位置中,例如,p
12
为从行为一到行为二的状态转移概率值。
57.群目标队形变换观测概率矩阵的构建方法为:
58.d1:为群目标构建一个m*n大小的观测概率矩阵b,其中,m为要研究的群目标的行为的个数,n为要研究的群目标的经典标准队形的个数;
59.d2:利用历史经验数据确定群目标要实现行为e的目的,群目标可能处于的各个经典标准队形的概率值,并存入观测概率矩阵对应的位置,例如,p
12
代表群目标完成行为一时所处的队形为队形二的概率值。
60.s4:根据群目标行为状态转移概率矩阵和群目标队形变换观测概率矩阵,构建用于连续时间序列的群目标行为分析的隐马尔科夫模型:
61.构建的隐马尔科夫模型隐马尔科夫模型由隐含状态链、观测链、状态转移矩阵a、观测概率矩阵b和初始状态链构成;
62.隐马尔科夫模型隐含状态链为群目标的行为状态集;隐马尔科夫模型的观测链为群目标队形阿基米德螺旋线系数序列。
63.s5:获取一个群目标连续帧的位置坐标,计算群目标每一帧的阿基米德螺旋线系数,得到阿基米德螺旋线系数序列;
64.s6:将获取的阿基米德螺旋线系数序列,作为观测序列带入隐马尔科夫模型,推断群目标的行为,对群目标行为进行定量分析识别,具体为:
65.e1:群目标行为状态转移矩阵a和群目标队形变换观测概率矩阵b构成了由标准队形阿基米德螺旋线系数到群目标行为的映射概率关系,具体矩阵公式形式如下:
66.映射关系:a
·
b;
67.e2:基于映射关系,从观测链中的阿基米德螺旋线系数信息推断出群目标行为,完成群目标的行为识别结果。
68.本实施例中将上述方法应用于舰船群的动态行为识别,具体过程如下:
69.步骤一:计算所研究的舰船群的标准队形的阿基米德螺旋线系数,具体如下:
70.(1a)确定海战中舰船群常用到的经典标准队形,即横队、纵队、楔形队、梯形队、环形队;
71.(1b)获取各个标准队形的坐标位置信息(x,y);
72.(1c)计算各个舰船群标准队形的阿基米德螺旋线系数a1,a2,a3,a4,a5,其中,a1,a2,a3,a4,a5分别为横队、纵队、楔形队、梯形队、环形队的阿基米德螺旋线系数值;其中,计算阿基米德螺旋线系数步骤如下:
73.(1c1)首先将(x,y)坐标转换为极坐标(ρ,θ);
74.(1c2)阿基米德螺旋线系数计算公式如下:
75.a=(ρ
1-ρ2)/(θ
1-θ2+2*pi)
76.其中pi的取值为π,其中(ρ1,θ1)为该舰船群内某一舰船的极坐标,(ρ2,θ2)为该舰船群内另一舰船的极坐标。
77.(1c3)对舰船群内计算出的两两舰船之间的阿基米德螺旋线系数取平均值,作为群目标该时刻最终的阿基米德螺旋线系数。
78.步骤二:确定针对舰船群的隐马尔科夫模型中的状态集,状态集内包括攻击行为、护航行为、防御行为、掩护行为、撤退行为。抽象为符号将状态集表示为s={s1,s2,s3,s4,s5},其中,s1,s2,s3,s4,s5分别对应舰船群的护航行为、攻击行为、防御行为、掩护行为、撤退行为;
79.步骤三:构建舰船群行为状态转移概率矩阵,即从进攻行为到防御行为的状态转移概率,从掩护行为到撤退行为的状态转移概率,从进攻行为到撤退行为的状态转移概率,具体如下:
80.(3a)为群目标构建一个mxm大小的状态转移矩阵a,其中,m为研究的舰船群的行为的个数;
81.(3b)利用历史经验数据确定群目标从行为一到行为二的概率值,确定群目标从行为一到行为二的概率值,并存入状态转移矩阵对应的位置中,例如,p
12
为从护航行为到攻击行为的状态转移概率值,存入状态转移矩阵的第一行第二列的位置;
82.步骤四:构建舰船群队形变换观测概率矩阵,例如,进攻行为下,是纵行队的概率,是楔形队的概率;防御行为下,是横队的概率是纵队的概率;具体如下:
83.(4a)为群目标构建一个mxn大小的观测概率矩阵b,其中,m为要研究的舰船群的行为的个数,n为要研究的舰船群的标准队形的个数;
84.(4b)利用历史经验数据确定舰船群要达到各个行为的目的,舰船群可能处于的各个标准队形的概率值,并存入观测概率矩阵对应的位置,例如,p
12
代表舰船群完成护航行为时是纵队队形的概率值,并存入观测概率矩阵的第一行第二列的位置;
85.步骤五:基于步骤二到步骤四,构建用于舰船群行为分析的隐马尔科夫模型。其中,隐马尔科夫的隐含链为各个舰船群的行为,包括护航、攻击、防御、掩护、撤退行为;观测链为各个标准队形的阿基米德螺旋线系数,横队、纵队、楔形队、梯形队、环形队;具体如下:
86.(5a)利用步骤三和步骤四建立的群目标的行为状态转移矩阵a和队形变换观测概率矩阵b,建立舰船群标准队形阿基米德螺旋线系数和舰船群行为之间的映射概率关系,构建针对舰船群行为识别分析的隐马尔科夫模型;
87.(5b)隐马尔科夫模型的观测链为舰船群连续每一时刻的阿基米德螺旋线系数,隐含状态链为舰船群连续每一时刻的行为。
88.步骤六:获取某一舰船群连续帧的位置坐标,计算舰船群连续55帧的阿基米德螺旋线系数a1,
…a55
,计算方式如步骤(1c1)-(1c3),获取到如图2所示的舰船群目标连续55帧的阿基米德螺旋线动态变化;
89.步骤七:将获取的阿基米德螺旋线系数序列,作为观测序列带入构建的针对舰船群的隐马尔科夫模型中,对舰船群行为进行定量分析,推断舰船群的行为,输出为55帧时间段内识别出的某几个时刻的舰船群行为序列集{s1,s2,s3,s2,s5,s1},本实施例中获取的舰船群行为识别结果具体如图3所示。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1