运输车辆安全管控系统及方法与流程
1.本发明涉及运输车辆领域,尤其涉及一种运输车辆安全管控系统及方法。
背景技术:
2.运输车辆按承载吨位分为微型运输车辆、轻型运输车辆、中型运输车辆、重型运输车辆、超重型运输车辆。微型运输车辆:总质量小于1.8吨。轻型运输车辆:总质量为1.8-6吨。中型运输车辆:总质量是6-14吨。重型运输车辆:总质量为14-100吨。超重型运输车辆:总质量100吨以上。运输车辆的车型包括平车、自卸车、牵引车、箱车、半挂等。
3.目前,在运输车辆进行卸货时,往往不考虑其车斗内部的黏土分布情况,这种情况下执行盲目倾倒卸货,会因为黏土积累过厚导致车头举升时引起翻车事故,同时,在车斗的实时运载重量很小即不存在运输货物时进行卸货操作,容易造成功耗和资源的浪费。
技术实现要素:
4.为了解决相关领域的技术问题,本发明提供了一种运输车辆安全管控系统及方法,能够在运输车辆执行车斗卸货操作之前,对车斗内部的黏土分布情况执行智能化的针对性分析,以在分析到的车斗内部的黏土过多时,触发黏土清除请求以避免黏土积累过厚导致车头举升时引起翻车事故,同时,在检测到车斗内不存在运输货物时禁用倾斜卸货功能,从而减少无谓的操作。
5.根据本发明的一方面,提供了一种运输车辆安全管控系统,所述系统包括:
6.运输车辆主架构,包括车斗、驾驶室、门框、把手、复合灯体、防雾灯、前档玻璃、卸货机构、重量测量机构和主控制器,所述车头用于运输货物,所述卸货机构包括液压缸和齿轮泵,所述门框、所述把手、所述复合灯体、所述防雾灯以及所述前档玻璃均设置在所述驾驶室上,所述卸货机构设置在所述车斗的下方,所述重量测量机构用于测量所述车头的实时运载重量,所述主控制器分别与所述卸货机构和所述重量测量机构连接,用于在接收到的所述实时运载重量大于等于设定重量阈值时,向所述卸货机构发送允许卸货命令;
7.数据采集器件,设置在所述车斗的正上方,用于在所述卸货机构被所述主控制器触发卸货动作的同时,对所述车斗内部环境执行图像数据采集动作,以获得触发内部图像;
8.区域捕获器件,设置在所述驾驶室内且与所述数据采集器件无线连接,用于基于黏土对应的灰度数值范围在所述触发内部图像内识别每一个黏土像素点,并将所述触发内部图像内的各个黏土像素点执行去除孤立黏土像素点后的剩余多个黏土像素点组合成一个以上黏土占据区域;
9.面积鉴定器件,与所述区域捕获器件连接,用于针对每一个黏土占据区域执行以下处理:获取构成所述黏土占据区域的各个像素点的各个景深值的中间值以作为所述黏土占据区域的代表景深数据,基于所述黏土占据区域的代表景深数据以及占据像素点总数评估所述黏土占据区域对应黏土实体的截面面积;
10.请求解析设备,与所述面积鉴定器件连接,用于将所述触发内部图像内的一个以
上黏土占据区域分别对应的一个以上的截面面积累加以获得参考黏土面积,并在所述参考黏土面积大于设定面积限量时,发出黏土清除请求。
11.根据本发明的另一方面,还提供了一种运输车辆安全管控方法,所述方法包括:
12.使用运输车辆主架构,包括车斗、驾驶室、门框、把手、复合灯体、防雾灯、前档玻璃、卸货机构、重量测量机构和主控制器,所述车头用于运输货物,所述卸货机构包括液压缸和齿轮泵,所述门框、所述把手、所述复合灯体、所述防雾灯以及所述前档玻璃均设置在所述驾驶室上,所述卸货机构设置在所述车斗的下方,所述重量测量机构用于测量所述车头的实时运载重量,所述主控制器分别与所述卸货机构和所述重量测量机构连接,用于在接收到的所述实时运载重量大于等于设定重量阈值时,向所述卸货机构发送允许卸货命令;
13.使用数据采集器件,设置在所述车斗的正上方,用于在所述卸货机构被所述主控制器触发卸货动作的同时,对所述车斗内部环境执行图像数据采集动作,以获得触发内部图像;
14.使用区域捕获器件,设置在所述驾驶室内且与所述数据采集器件无线连接,用于基于黏土对应的灰度数值范围在所述触发内部图像内识别每一个黏土像素点,并将所述触发内部图像内的各个黏土像素点执行去除孤立黏土像素点后的剩余多个黏土像素点组合成一个以上黏土占据区域;
15.使用面积鉴定器件,与所述区域捕获器件连接,用于针对每一个黏土占据区域执行以下处理:获取构成所述黏土占据区域的各个像素点的各个景深值的中间值以作为所述黏土占据区域的代表景深数据,基于所述黏土占据区域的代表景深数据以及占据像素点总数评估所述黏土占据区域对应黏土实体的截面面积;
16.使用请求解析设备,与所述面积鉴定器件连接,用于将所述触发内部图像内的一个以上黏土占据区域分别对应的一个以上的截面面积累加以获得参考黏土面积,并在所述参考黏土面积大于设定面积限量时,发出黏土清除请求。
17.本发明具备以下几处显著的技术效果:第一处:采用针对性的检测机制对运输车辆的车斗内部各块黏土实体截面积之和进行统计,并在统计结果超限时,在倾倒车斗之前发出黏土请求信号以触发对车斗内的过量的黏土的清除,从而避免黏土积累过厚导致车头举升时引起翻车事故;第二处:对运输车辆的车斗内部的实时运载重量进行检测,以在实时运载重量大于等于设定重量阈值时,向车头的卸货机构发送允许卸货命令,否则,发送禁止卸货命令,以避免空置状态下的车斗被倾倒。
附图说明
18.以下将结合附图对本发明的实施方案进行描述,其中:
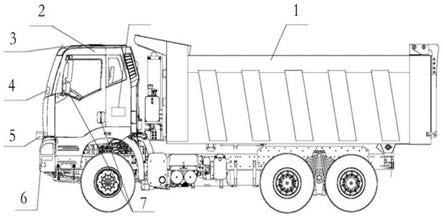
19.图1为根据本发明实施方案示出的运输车辆安全管控系统及方法所使用的运输车辆主架构的结构示意图。
20.图2为根据本发明实施方案示出的运输车辆安全管控方法的步骤流程图。
具体实施方式
21.下面将参照附图对本发明的运输车辆安全管控方法的实施方案进行详细说明。
22.车斗,即车厢,是载人汽车、运输车辆等载人或装东西的部分。车斗是载人汽车、运输车辆的一项重要参数,例如,对于运输车辆来说,车斗的容积直接决定了其单次载货能力以及其平均耗油量。目前,在运输车辆进行卸货时,往往不考虑其车斗内部的黏土分布情况,这种情况下执行盲目倾倒卸货,会因为黏土积累过厚导致车头举升时引起翻车事故,同时,在车斗的实时运载重量很小即不存在运输货物时进行卸货操作,容易造成功耗和资源的浪费。
23.为了克服上述不足,本发明搭建了一种运输车辆安全管控系统及方法,能够有效解决相应的技术问题。
24.为此,本发明需要具备以下几处显著的技术效果:第一处:采用针对性的检测机制对运输车辆的车斗内部各块黏土实体截面积之和进行统计,并在统计结果超限时,在倾倒车斗之前发出黏土请求信号以触发对车斗内的过量的黏土的清除,从而避免黏土积累过厚导致车头举升时引起翻车事故;第二处:对运输车辆的车斗内部的实时运载重量进行检测,以在实时运载重量大于等于设定重量阈值时,向车头的卸货机构发送允许卸货命令,否则,发送禁止卸货命令,以避免空置状态下的车斗被倾倒。
25.图1为根据本发明实施方案示出的运输车辆安全管控系统及方法所使用的运输车辆主架构的结构示意图。
26.如图1所示,所述运输车辆主架构包括车斗1、驾驶室2、门框3、把手7、复合灯体5、防雾灯6、前档玻璃4、卸货机构、重量测量机构和主控制器。
27.根据本发明实施方案示出的运输车辆安全管控系统包括:
28.运输车辆主架构,包括车斗、驾驶室、门框、把手、复合灯体、防雾灯、前档玻璃、卸货机构、重量测量机构和主控制器,所述车头用于运输货物,所述卸货机构包括液压缸和齿轮泵,所述门框、所述把手、所述复合灯体、所述防雾灯以及所述前档玻璃均设置在所述驾驶室上,所述卸货机构设置在所述车斗的下方,所述重量测量机构用于测量所述车头的实时运载重量,所述主控制器分别与所述卸货机构和所述重量测量机构连接,用于在接收到的所述实时运载重量大于等于设定重量阈值时,向所述卸货机构发送允许卸货命令;
29.数据采集器件,设置在所述车斗的正上方,用于在所述卸货机构被所述主控制器触发卸货动作的同时,对所述车斗内部环境执行图像数据采集动作,以获得触发内部图像;
30.区域捕获器件,设置在所述驾驶室内且与所述数据采集器件无线连接,用于基于黏土对应的灰度数值范围在所述触发内部图像内识别每一个黏土像素点,并将所述触发内部图像内的各个黏土像素点执行去除孤立黏土像素点后的剩余多个黏土像素点组合成一个以上黏土占据区域;
31.面积鉴定器件,与所述区域捕获器件连接,用于针对每一个黏土占据区域执行以下处理:获取构成所述黏土占据区域的各个像素点的各个景深值的中间值以作为所述黏土占据区域的代表景深数据,基于所述黏土占据区域的代表景深数据以及占据像素点总数评估所述黏土占据区域对应黏土实体的截面面积;
32.请求解析设备,与所述面积鉴定器件连接,用于将所述触发内部图像内的一个以上黏土占据区域分别对应的一个以上的截面面积累加以获得参考黏土面积,并在所述参考黏土面积大于设定面积限量时,发出黏土清除请求。
33.接着,继续对本发明的运输车辆安全管控系统的具体结构进行进一步的说明。
34.所述运输车辆安全管控系统中还可以包括:
35.特征存储机构,采用大数据服务器来实现,用于预先存储黏土对应的灰度数值范围;
36.其中,所述请求解析设备还用于在所述参考黏土面积小于等于所述设定面积限量时,发出直接卸货请求;
37.其中,所述主控制器还用于在接收到的所述实时运载重量小于所述设定重量阈值时,向所述卸货机构发送禁止卸货命令;
38.其中,所述把手设置在所述门框上,所述复合灯体包括远光灯具和近光灯具,所述防雾灯设置在所述复合灯体的下方。
39.在所述运输车辆安全管控系统中:
40.获取构成所述黏土占据区域的各个像素点的各个景深值的中间值以作为所述黏土占据区域的代表景深数据,基于所述黏土占据区域的代表景深数据以及占据像素点总数评估所述黏土占据区域对应黏土实体的截面面积包括:在所述黏土占据区域的代表景深数据不变时,评估的所述黏土占据区域对应黏土实体的截面面积与占据像素点总数成正比。
41.在所述运输车辆安全管控系统中:
42.获取构成所述黏土占据区域的各个像素点的各个景深值的中间值以作为所述黏土占据区域的代表景深数据,基于所述黏土占据区域的代表景深数据以及占据像素点总数评估所述黏土占据区域对应黏土实体的截面面积包括:在所述黏土占据区域的占据像素点总数不变时,评估的所述黏土占据区域对应黏土实体的截面面积与代表景深数据成单调正关联。
43.在所述运输车辆安全管控系统中:
44.基于黏土对应的灰度数值范围在所述触发内部图像内识别每一个黏土像素点,并将所述触发内部图像内的各个黏土像素点执行去除孤立黏土像素点后的剩余多个黏土像素点组合成一个以上黏土占据区域包括:当所述触发内部图像内某一个像素点的灰度值在黏土对应的灰度数值范围内时,确定所述某一个像素点为一个黏土像素点。
45.图2为根据本发明实施方案示出的运输车辆安全管控方法的步骤流程图,所述方法包括:
46.步骤s201:使用运输车辆主架构,包括车斗、驾驶室、门框、把手、复合灯体、防雾灯、前档玻璃、卸货机构、重量测量机构和主控制器,所述车头用于运输货物,所述卸货机构包括液压缸和齿轮泵,所述门框、所述把手、所述复合灯体、所述防雾灯以及所述前档玻璃均设置在所述驾驶室上,所述卸货机构设置在所述车斗的下方,所述重量测量机构用于测量所述车头的实时运载重量,所述主控制器分别与所述卸货机构和所述重量测量机构连接,用于在接收到的所述实时运载重量大于等于设定重量阈值时,向所述卸货机构发送允许卸货命令;
47.步骤s202:使用数据采集器件,设置在所述车斗的正上方,用于在所述卸货机构被所述主控制器触发卸货动作的同时,对所述车斗内部环境执行图像数据采集动作,以获得触发内部图像;
48.步骤s203:使用区域捕获器件,设置在所述驾驶室内且与所述数据采集器件无线连接,用于基于黏土对应的灰度数值范围在所述触发内部图像内识别每一个黏土像素点,
并将所述触发内部图像内的各个黏土像素点执行去除孤立黏土像素点后的剩余多个黏土像素点组合成一个以上黏土占据区域;
49.步骤s204:使用面积鉴定器件,与所述区域捕获器件连接,用于针对每一个黏土占据区域执行以下处理:获取构成所述黏土占据区域的各个像素点的各个景深值的中间值以作为所述黏土占据区域的代表景深数据,基于所述黏土占据区域的代表景深数据以及占据像素点总数评估所述黏土占据区域对应黏土实体的截面面积;
50.步骤s205:使用请求解析设备,与所述面积鉴定器件连接,用于将所述触发内部图像内的一个以上黏土占据区域分别对应的一个以上的截面面积累加以获得参考黏土面积,并在所述参考黏土面积大于设定面积限量时,发出黏土清除请求。
51.接着,继续对本发明的运输车辆安全管控方法的具体步骤进行进一步的说明。
52.所述运输车辆安全管控方法还可以包括:
53.使用特征存储机构,采用大数据服务器来实现,用于预先存储黏土对应的灰度数值范围;
54.其中,所述请求解析设备还用于在所述参考黏土面积小于等于所述设定面积限量时,发出直接卸货请求;
55.其中,所述主控制器还用于在接收到的所述实时运载重量小于所述设定重量阈值时,向所述卸货机构发送禁止卸货命令;
56.其中,所述把手设置在所述门框上,所述复合灯体包括远光灯具和近光灯具,所述防雾灯设置在所述复合灯体的下方。
57.所述运输车辆安全管控方法中:
58.获取构成所述黏土占据区域的各个像素点的各个景深值的中间值以作为所述黏土占据区域的代表景深数据,基于所述黏土占据区域的代表景深数据以及占据像素点总数评估所述黏土占据区域对应黏土实体的截面面积包括:在所述黏土占据区域的代表景深数据不变时,评估的所述黏土占据区域对应黏土实体的截面面积与占据像素点总数成正比。
59.所述运输车辆安全管控方法中:
60.获取构成所述黏土占据区域的各个像素点的各个景深值的中间值以作为所述黏土占据区域的代表景深数据,基于所述黏土占据区域的代表景深数据以及占据像素点总数评估所述黏土占据区域对应黏土实体的截面面积包括:在所述黏土占据区域的占据像素点总数不变时,评估的所述黏土占据区域对应黏土实体的截面面积与代表景深数据成单调正关联。
61.所述运输车辆安全管控方法中:
62.基于黏土对应的灰度数值范围在所述触发内部图像内识别每一个黏土像素点,并将所述触发内部图像内的各个黏土像素点执行去除孤立黏土像素点后的剩余多个黏土像素点组合成一个以上黏土占据区域包括:当所述触发内部图像内某一个像素点的灰度值在黏土对应的灰度数值范围内时,确定所述某一个像素点为一个黏土像素点。
63.另外,在所述运输车辆安全管控系统及方法中,基于黏土对应的灰度数值范围在所述触发内部图像内识别每一个黏土像素点,并将所述触发内部图像内的各个黏土像素点执行去除孤立黏土像素点后的剩余多个黏土像素点组合成一个以上黏土占据区域还包括:当所述触发内部图像内某一个像素点的灰度值在黏土对应的灰度数值范围外时,确定所述
某一个像素点为一个非黏土像素点。
64.采用本发明的运输车辆安全管控系统及方法,针对现有技术中运输车辆执行车斗卸货操作时管控能力低下的技术问题,能够在运输车辆执行车斗卸货操作之前,对车斗内部的黏土分布情况执行智能化的针对性分析,以在分析到的车斗内部的黏土过多时,触发黏土清除请求以避免相关翻车事故,同时,在检测到车斗内不存在运输货物时禁用倾斜卸货功能,从而全方位提升运输车辆的管控水平。
65.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
66.本说明书中的各个实施例均采用相关的方式描述,各个实施例之间相同相似的部分互相参见即可,每个实施例重点说明的都是与其他实施例的不同之处。尤其,对于装置实施例而言,由于其基本相似于方法实施例,所以描述的比较简单,相关之处参见方法实施例的部分说明即可。
67.以上所述仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1