多图融合的城市区域表示学习方法及预测方法
1.本发明涉及图表示学习技术领域,特别涉及一种多图融合的城市区域表示学习方法和一种多图融合的城市区域预测方法。
背景技术:
2.相关技术中,城市区域表示学习指的是利用城市时空数据学习到城市区域的向量表示,在实际场景中城市时空数据往往由于隐私性、安全性等问题,不易获得;并且城市时空数据容易存在冗余信息,而该存在阻碍了城市区域表示的泛化能力提升,因此无法支撑跨领域的下游任务。
技术实现要素:
3.本发明旨在至少在一定程度上解决上述技术中的技术问题之一。为此,本发明的一个目的在于提出一种多图融合的城市区域表示学习方法,只需通过人群移动数据进行城市区域表示学习,且能够有效消除冗余信息,提升了城市区域表示的泛化能力。
4.本发明的第二个目的在于提出一种多图融合的城市区域预测方法。
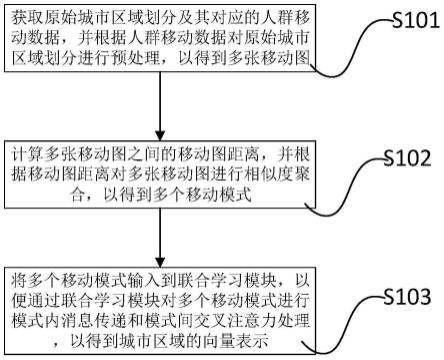
5.为达到上述目的,本发明第一方面实施例提出了一种多图融合的城市区域表示学习方法,包括以下步骤:获取原始城市区域划分及其对应的人群移动数据,并根据人群移动数据对原始城市区域划分进行预处理,以得到多张移动图;计算多张移动图之间的移动图距离,并根据移动图距离对多张移动图进行相似度聚合,以得到多个移动模式;将多个移动模式输入到联合学习模块,以便通过联合学习模块对多个移动模式进行模式内消息传递和模式间交叉注意力处理,以得到城市区域的向量表示。
6.根据本发明实施例的多图融合的城市区域表示学习方法,首先,获取原始城市区域划分及其对应的人群移动数据,并根据人群移动数据对原始城市区域划分进行预处理,以得到多张移动图;然后,计算多张移动图之间的移动图距离,并根据移动图距离对多张移动图进行相似度聚合,以得到多个移动模式;最后,将多个移动模式输入到联合学习模块,以便通过联合学习模块对多个移动模式进行模式内消息传递和模式间交叉注意力处理,以得到城市区域的向量表示;由此,只需通过人群移动数据进行城市区域表示学习,且能够有效消除冗余信息,提升了城市区域表示的泛化能力。
7.另外,根据本发明上述实施例提出的多图融合的城市区域表示学习方法还可以具有如下附加的技术特征:
8.可选地,根据所述人群移动数据对所述原始城市区域划分进行预处理,以得到多张移动图,包括:将所述原始城市区域划分划分为多个不相交的城市区域,将所述每个城市区域作为节点特征,将所述每个城市区域间的人群移动数据作为节点上的边特征;在不同时间步上获取节点特征和边特征,以得到对应的多张移动图。
9.可选地,计算所述多张移动图之间的移动图距离,包括:计算所述多张移动图两两之间在均值和方差上的距离;计算所述多张移动图两两之间在单向流量指数上的距离;计
算所述多张移动图两两之间的空间结构标记距离;根据所述多张移动图两两之间在均值和方差上的距离、所述多张移动图两两之间在单向流量指数上的距离和所述多张移动图两两之间的空间结构标记距离获得所述多张移动图之间的移动图距离。
10.可选地,根据所述移动图距离对所述多张移动图进行相似度聚合,以得到多个移动模式,包括:根据所述移动图距离采用层次聚类法将相似的移动图聚合为一个移动模式,从而得到多个移动模式。
11.可选地,通过以下公式计算多张移动图两两之间在均值和方差上的距离:
[0012][0013]dmean
(g
ar
gb)=||μg
a-μgb||
[0014][0015]
其中,μg表示移动图g中流量的均值,e表示移动图g中的边的集合,ω表示e中的边的权重,表示移动图g中边的权重分布方差,ga表示第a张移动图,gb表示第b张移动图,d
mean
(ga,gb)表示第a张移动图和第b张移动图在均值上的距离,d
var
(ga,gb)表示第a张移动图和第b张移动图在方差上的距离,μga表示第a张移动图的均值,μgb表示第b张移动图的均值,表示第a张移动图的方差,表示第b张移动图的方差。
[0016]
可选地,通过以下公式计算多张移动图两两之间在单向流量指数上的距离:
[0017][0018]dunif
(ga,gb)=||unif(ga)-unif(gb)||
[0019]
其中,g
t
表示在时间步t的移动图,unif(g
t
)表示在时间步t的移动图的单向流量指数,v表示城市区域构成的集合,vi表示集合v内的第i个城市区域,vj表示集合内的第j个城市区域,表示在时间步t,从区域vi到区域vj的人群移动流量强度,表示在时间步t,从区域vj到区域vi的人群移动流量强度,d
unif
(ga,gb)表示第a张移动图和第b张移动图在单向流量指数上的距离,unif(ga)表示第a张移动图的单向流量指数,unif(gb)表示第b张移动图的单向流量指数。
[0020]
可选地,通过以下公式计算所述多张移动图两两之间的空间结构标记距离:
[0021][0022][0023][0024]
其中,将移动图g
t
标记为空间结构标记矩阵ε
t
,在空间结构标记矩阵ε
t
中,每个元素都代表移动图g
t
中的边的权重是否大于均值,μ
ij
表示从节点vi到节点vj的流量在时域上的均值,t表示时间步的总数量,表示从节点vi到节点vj在时间步t的流量,d
ss
(ga,
gb)表示第a张移动图和第b张移动图的空间结构标记距离,表示异或运算,εa和εb分别表示移动图ga和gb的空间结构标记矩阵。
[0025]
可选地,根据所述多张移动图两两之间在均值和方差上的距离、所述多张移动图两两之间在单向流量指数上的距离和所述多张移动图两两之间的空间结构标记距离获得所述多张移动图之间的移动图距离,包括:
[0026]
mgd(ga,gb)=z(δt)∑cim(di)
[0027]
其中,mgd(ga,gb)表示第a张移动图和第b张移动图的移动图距离,ci表示各个空间结构距离的权重,di表示一种空间结构距离,可以是d
mean
,d
var
,d
unif
,d
ss
,m(
·
)表示对空间结构距离进行标准化,z(
·
)表示激活函数,δt表示移动图ga和gb之间的时间间隔。
[0028]
可选地,所述联合学习模块包括模式内消息传递层、模式间交叉注意力层、和全连接层。
[0029]
为达到上述目的,本发明第二方面实施例提出了一种多图融合的城市区域预测方法,包括:获取上述多图融合的城市区域表示学习方法得到的城市区域的向量表示;将所述城市区域的向量表示作为预测模型的输入,以便对城市区域的相应任务进行预测。
[0030]
根据本发明实施例的多图融合的城市区域预测方法,通过获取上述多图融合的城市区域表示学习方法得到的城市区域的向量表示;将城市区域的向量表示作为预测模型的输入,以便对城市区域的相应任务进行预测;由此,只需通过人群移动数据进行城市区域表示学习,且能够有效消除冗余信息,提升了城市区域表示的泛化能力,以实现多种跨领域的预测任务。
附图说明
[0031]
图1为根据本发明实施例的多图融合的城市区域表示学习的流程示意图;
[0032]
图2为根据本发明实施例的多图融合的城市区域表示学习的总框架图;
[0033]
图3为根据本发明实施例的联合学习模块的结构示意图;
[0034]
图4为根据本发明实施例的多图融合的城市区域预测方法的流程示意图。
具体实施方式
[0035]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
[0036]
相关技术中,城市区域表示学习指的是利用城市时空数据学习到城市区域的向量表示,并使得学习到的向量表示可以支撑跨领域的多样化下游任务,如签到数量预测、犯罪数量预测、土地利用类型预测等。从丰富多样且相互关联的城市时空数据中学习一个通用的城市区域表示面临以下挑战:
[0037]
(1)现有的多视角方法所基于的多源城市时空数据,在实际场景中往往由于隐私性、安全性等问题,不易获得;现有的方法基于兴趣点、人群移动、社交网络打卡签到等多源数据,在实际场景下,涉及隐私问题和多个数据来源部分的协调问题,不易同时获得;因此,本发明仅使用人群移动数据,进行城市区域的表示学习,在实际场景中更易实现,且取得了比现有方法更好的效果。
[0038]
(2)城市时空数据的冗余信息阻碍了城市区域表示的泛化能力提升;如,人群移动会呈现周期性的特点,在每个工作日的早上7-9点的三个小时均是早高峰;如,现有方法对此类冗余信息不加分析融合等处理,而直接将其输入到模型中,模型学到的仅仅是人群移动的周期性变化,而不是更为重要的城市区域的通用嵌入表示;模型最终学到的区域表示仅仅在预测人群移动时有良好的效果,但无法支撑跨领域的下游任务;因此,学习具备泛化性的城市区域表示是城市区域表示学习中的研究难点之一。
[0039]
为此,本发明提出了一种多图融合的城市区域表示学习方法,首先,获取原始城市区域划分及其对应的人群移动数据,并根据人群移动数据对原始城市区域划分进行预处理,以得到多张移动图;然后,计算多张移动图之间的移动图距离,并根据移动图距离对多张移动图进行相似度聚合,以得到多个移动模式;最后,将多个移动模式输入到联合学习模块,以便通过联合学习模块对多个移动模式进行模式内消息传递和模式间交叉注意力处理,以得到城市区域的向量表示;由此,只需通过人群移动数据进行城市区域表示学习,且能够有效消除冗余信息,提升了城市区域表示的泛化能力。
[0040]
为了更好的理解上述技术方案,下面将参照附图更详细地描述本发明的示例性实施例。虽然附图中显示了本发明的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
[0041]
为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案进行详细的说明。
[0042]
图1为根据本发明实施例的多图融合的城市区域表示学习的流程示意图,如图1所示,该城市区域表示学习包括以下步骤:
[0043]
s101,获取原始城市区域划分及其对应的人群移动数据,并根据人群移动数据对原始城市区域划分进行预处理,以得到多张移动图。
[0044]
作为一个实施例,根据人群移动数据对原始城市区域划分进行预处理,以得到多张移动图,包括:将原始城市区域划分划分为多个不相交的城市区域,将每个城市区域作为节点特征,将每个城市区域间的人群移动数据作为节点上的边特征;在不同时间步上获取节点特征和边特征,以得到对应的多张移动图。
[0045]
需要说明的是,可将出租车数据作为人群移动数据,也就是说,采集的出租车移动数据作为人群移动数据,当然也可以以别的设备的移动数据作为人群移动数据;另外,原始城市区域划分可以为拍摄的城市照片或者是包含城市区域位置索引的空间地理数据;本发明对此不作具体限定。
[0046]
也就是说,将一个城市的辖域按照经纬度或者行政区块划分为多个不相交的城市区域,将城市区域视为节点,将各个城市区域之间的人群移动数据视为节点上的边,设置时间步的间隔为1小时或者2个小时,时间步可根据在先经验预先设置;在时间步t,城市中各个区域之间的人群移动被定义为一个有向带权完全图g
t
=(v,e
t
);在集合v中的一个节点vi∈v代表一个城市区域vi;对同一个城市区域集合在多个时间步上构成的移动图的集合称为多重移动图,即多张移动图,它是一个有向带权的多图其中,g
t
是在时间步t的移动图。
[0047]
s102,计算多张移动图之间的移动图距离,并根据移动图距离对多张移动图进行
相似度聚合,以得到多个移动模式。
[0048]
也就是说,通过衡量人群移动在时间和空间上的相似度,进而融合相似的人群移动,首先通过移动图距离计算不同的移动图之间的距离(或相似度),然后将相似度高的移动图融合为一个移动模式,最终移动模式的数量小于等于移动图的数量。
[0049]
作为一个实施例,计算多张移动图之间的移动图距离,包括:计算多张移动图两两之间在均值和方差上的距离;计算多张移动图两两之间在单向流量指数上的距离;计算多张移动图两两之间的空间结构标记距离;根据多张移动图两两之间在均值和方差上的距离、多张移动图两两之间在单向流量指数上的距离和多张移动图两两之间的空间结构标记距离获得多张移动图之间的移动图距离。
[0050]
需要说明的是,上述各项距离可根据实际需要进行相应增减,以达到对应的效果,本发明对此不作具体限定。
[0051]
作为一个具体实施例,通过以下公式计算多张移动图两两之间在均值和方差上的距离:
[0052][0053]dmean
(ga,gb)=||μg
a-μgb||
[0054][0055]
其中,μg表示移动图g中流量的均值,e表示移动图g中的边的集合,ω表示e中的边的权重,表示移动图g中边的权重分布方差,ga表示第a张移动图,gb表示第b张移动图,d
mean
(ga,gb)表示第a张移动图和第b张移动图在均值上的距离,d
var
(ga,gb)表示第a张移动图和第b张移动图在方差上的距离,μga表示第a张移动图的均值,μgb表示第b张移动图的均值,表示第a张移动图的方差,表示第b张移动图的方差。
[0056]
需要说明的是,为了衡量移动图的相似程度,首先从空间结构上考虑;衡量两张移动图数据在均值和方差上的差异,以作为衡量两张移动图相似度的一种手段,因此对于移动图,首先假设边上的权重服从正态分布,然后,分别采用上述公式计算移动图边上的均值和方差,再得到两张移动图在均值和方差上的距离。
[0057]
作为一个具体实施例,通过以下公式计算多张移动图两两之间在单向流量指数上的距离:
[0058][0059]dunif
(ga,gb)=||unif(ga)-unif(gb)||
[0060]
其中,g
t
表示在时间步t的移动图,unif(g
t
)表示在时间步t的移动图的单向流量指数,v表示城市区域构成的集合,vi表示集合内的第i个城市区域,vj表示集合内的第j个城市区域,表示在时间步t,从区域vi到区域vj的人群移动流量强度,表示在时间步t,从区域vj到区域vi的人群移动流量强度,d
unif
(ga,gb)表示第a张移动图和第b张移动图在单向流量指数上的距离,unif(ga)表示第a张移动图的单向流量指数,unif(b)表示第b张移动图的单向流量指数。
[0061]
需要说明的是,对于具有复杂城市时空属性的移动图来说,仅通过均值和方差衡
量相似度是不充分的;比如,早高峰和晚高峰时段的移动图,人群移动的流量大,且分布不均匀,都是在通勤路段上的人流量大,即均值和方差很相似,但是它们的目的地是不同的,早高峰的目的地是工作区域,而晚高峰的目的地就更复杂,可能是居住区,也可能是娱乐休闲区域等,而这些不平衡的交通流量,以及人群移动的方向,是表达区域特征的关键所在,因此,本发明提出单向流量指数衡量移动图中区域间流量不平衡的程度,通过上述公式得到单向流量指数以及两张移动图在单向流量指数上的距离。
[0062]
作为一个具体实施例,通过以下公式计算所述多张移动图两两之间的空间结构标记距离:
[0063][0064][0065][0066]
其中,将移动图g
t
标记为空间结构标记矩阵ε
t
,在空间结构标记矩阵ε
t
中,每个元素都代表移动图g
t
中的边的权重是否大于均值,μ
ij
表示从节点vi到节点vj的流量在时域上的均值,t表示时间步的总数量,表示从节点vi到节点vj在时间步t的流量,d
ss
(ga,gb)表示第a张移动图和第b张移动图的空间结构标记距离,表示异或运算,εa和εb分别表示移动图ga和gb的空间结构标记矩阵。
[0067]
需要说明的是,除了单向流量上的差距,还需要关注移动图中高流量的边,因此,将移动图中权重大的边进行标记。即,将移动图g
t
标记为空间结构标记矩阵ε
t
,在空间结构标记矩阵ε
t
中,每个元素都代表移动图g
t
中的边的权重是否足够大,如果是,则令为1,如果否则令为0,然后通过上述公式得到两张移动图之间的空间结构标记距离。
[0068]
作为一个具体实施例,根据多张移动图两两之间在均值和方差上的距离、多张移动图两两之间在单向流量指数上的距离和多张移动图两两之间的空间结构标记距离获得多张移动图之间的移动图距离,包括:
[0069]
mgd(ga,gb)=z(δt)∑cim(di)
[0070]
其中,mgd(ga,gb)表示第a张移动图和第b张移动图的移动图距离,ci表示各个空间结构距离的权重,di表示一种空间结构距离,可以是d
mean
,d
var
,d
unif
,d
ss
,m(
·
)表示对空间结构距离进行标准化,z(
·
)表示激活函数,δt表示移动图ga和gb之间的时间间隔。
[0071]
需要说明的是,上述实施例中定义了移动图的空间结构距离的计算方式,本实施例融合时域相似度,最终定义的移动图距离为带权重的空间结构距离与时域系数的积;由于不同的空间结构距离的量级可能不同,因此需要使用m(
·
)对空间结构距离进行标准化,如m(
·
)可以取最小最大标准化(minmaxscaler);z(
·
)代表激活函数,如sigmoid;时间间隔近的移动图会更加相似,因此引入δt,代表移动图ga和gb之间的时间间隔。
[0072]
作为一个实施例,根据移动图距离对多张移动图进行相似度聚合,以得到多个移动模式,包括:根据移动图距离采用层次聚类法将相似的移动图聚合为一个移动模式,从而得到多个移动模式。
[0073]
需要说明的是,在计算出移动图距离之后,使用聚类方法,例如层次聚类将相似的移动图聚合为移动模式由于原始的时序的移动图中有大量周期性的冗余信息,表现为相似的移动图,因此本发明将这些周期性出现的、具有相似性的移动图根据移动图距离进行聚合,聚合后的移动模式有效消除了冗余,有利于下一步对城市区域的表示学习。
[0074]
s103,将多个移动模式输入到联合学习模块,以便通过联合学习模块对多个移动模式进行模式内消息传递和模式间交叉注意力处理,以得到城市区域的向量表示。
[0075]
作为一个实施例,联合学习模块包括模式内消息传递层、模式间交叉注意力层、和全连接层。
[0076]
也就是说,在将相似度高的移动图聚合成移动模式后,通过联合学习模块从多个移动模式中学习城市区域的表示,在移动图和移动模式中,一个城市区域被表示为图中的节点;首先,通过模式内消息传递(intra-pattern message passing,简称ipmp),实现一个移动模式内各个节点的信息交互,最终为每个节点学习到一个融合了移动模式中图结构信息的表示;然后,通过模式间交叉注意力(inter-pattern message cross attention,简称ipmca)整合同一个节点在不同的移动模式中的表示信息;最后,通过残差网络连接这两个部分的输出,并通过一个全连接网络获得最终的区域表示;整个联合学习模块的架构图如图3所示。
[0077]
需要说明的是,由于空间上的相关性,一个城市区域会受到其他相关区域的影响,但是这种影响受限于区域之间不同的交互程度。在移动模式中,区域间的交互表现为区域间的流量,也即边上的权重。对于一个区域来说,它和其他区域有两种交互方式,分别是此区域往别的区域的流量,和别的区域往此区域的流量。在移动模式中,即分别是一个节点的出边和入边;因此,为了捕捉这种空间上的相关性,本发明分别考虑一个节点的出边和入边两种信息,设计了模式内消息传递,它通过对一个移动模式中不同区域间的消息传递实现对单个模式中城市区域表示的学习。
[0078]
模式内消息传递以移动模式作为输入,对于移动模式中的节点vi,将节点特征初始化为模型中节点第0层隐藏层的节点表示,即考虑移动模式中节点间的流量vj→
vi,并结合图注意力机制,定义消息传递函数:
[0079][0080]
其中,《
·
,
·
》表示内积,和是两个可训练的投影矩阵,d表示隐藏层中节点表示的维度,表示城市区域vi在移动模式中的向量表示,n(vi)表示vi的邻居节点的集合,此处,从城市区域vj到vi传递的消息同时也是注意力值。
[0081]
在通过消息传递函数计算出注意力值之后,节点vi会集成由它的邻居集合n(vi)中每个邻居发送的消息,并对每个邻居的消息赋予不同的权重,然后更新自己的隐藏层表示,即:
[0082]
[0083]
其中,表示第l层的可学习投影矩阵;由于在移动模式中,每个城市区域(即每个节点)都和其他的所有区域有交互,因此,每个节点的邻居都是除此节点之外的所有其他节点,即n(vi)=v,vi∈v。
[0084]
考虑到在消息传递的过程中,节点到节点间可能有丰富的多种信息,如在早高峰时段,一个区域去另一个区域的流量也很有可能有多种构成,而不仅仅只是通勤的人流。因此,将自注意力机制拓展为多头注意力机制,以从不同的角度学习节点间消息传递的内容,同时也能起到稳定学习过程的作用。即对f个平行的注意力消息赋予不同的可训练权重,然后对它们进行拼接:
[0085][0086]
其中,||表示拼接操作,表示由消息传递函数计算出的第f个注意力头的注意力值。
[0087]
根据人群移动数据学习城市区域表示学习的过程中,考虑人群移动的方向,即流入和流出两种流量对城市区域的不同影响;可以把移动模式分成两部分,以每个节点为移动起点的移动模式和以每个节点为终点的移动模式因此,可以分别将节点的出边矩阵和入边矩阵分别作为两种移动模式和的节点特征,以分别进行模式内的消息传递;其中,在学习到这两种模式下节点的表示后,对这两种表示进行拼接,然后投影到一个固定的长度作为最终节点表示的输出:
[0088][0089]
其中,f(
·
)表示一个可训练的线性投影函数;输入n个移动模式时,对每个移动模式都经过堆叠l层的模式内消息传递网络,则可得到一个节点vi在n个移动模式上分别的表示
[0090]
需要说明的是,模式内的消息传递提供了在每个移动模式内学习该模式上的空间相关性的方法,但是在多个模式之间没有交互;本发明的模式间交叉注意力将通过多个模式间同一个节点之间的注意力机制,使得模型考虑多个移动模式上的交互,从而为城市区域学习到一个综合性的表示。
[0091]
对于一个城市区域vi,它在两个移动模式和上的节点表示分别是和那么,可以使用自注意力机制,对这两个移动模式和进行相关度计算,表示为:
[0092][0093]
其中,和是两个可训练的投影矩阵,表示移动模式式中的节点对移动模式中的节点的注意力值;然后,再次运用多头注意力,并对模式间的消息赋予不同的权重,可以得到:
[0094][0095]
在经过移动模式间的交叉注意力后,每个移动模式上节点的表示都根据其他模式上这个节点的表示进行相应的更新,最后,将多个移动模式上节点的模式进行融合,作为模式间交叉注意力层的输出:
[0096][0097]
需要说明的是,为了使学到的区域表示尽可能包含丰富的区域信息,可以用学到的区域表示来还原原始的人群移动数据分布,然后计算还原的数据分布与真实的人群移动分布之间的差距,并用优化的方法最小化这个距离值,即将这个距离作为目标函数;首先,估计真实人群移动数据的分布,记从区域vi到区域vj的人群移动流量为ω
ij
,那么,对于给定的起点vi,其人群移动流量是以vj为终点的转移概率为:
[0098][0099]
其中,n(vi)表示成熟区域vi的邻居所构成的集合。
[0100]
然后,要根据城市区域的表示对人群移动的概率分布进行估计;通过模式内消息传递和模式间交叉注意力,可以分别得到关于一个节点的模式内表示与模式间表示将这两种表示融合后,经过一个全连接层,获得最终的节点表示:
[0101][0102]
那么,给定两个节点vi和vj的表示和可以估计从起点vi出发的人群,其目的地为vj的转移概率为:
[0103][0104]
最终的目标函数可以表示为:
[0105][0106]
即可使用反向传播算法对mgfn进行端到端的训练,得到每个城市区域vi∈v分散、低维度的向量表示
[0107]
综上所述,多图融合的城市区域表示学习方法框架如图2所示:首先,输入人群移动数据,将人群移动数据按时序展开,形成多张移动图;然后对多张移动图进行相似度计算,把相似的移动图进行融合,形成多个移动模式,其中每个移动模式都由相似的移动图融合而成;最后,将移动模式输入到移动模式学习模块中,得到每个区域的向量表示;以便后续通过向量表示执行下游任务,由此,仅基于人群移动数据开展城市区域表示学习,根据时空间相关性计算移动图之间的距离,将距离相近的移动图融合为移动模式;通过模式内消
息传递对每个移动模式学习到一个局部的城市区域表示,然后通过模式间交叉注意力使各个移动模式学习到的区域表示互相增强,得到一个综合性的城市区域表示。
[0108]
如图4所示,本发明实施例还提出了一种多图融合的城市区域预测方法,除上述多图融合的城市区域表示学习方法外,还包括:
[0109]
s104,将城市区域的向量表示作为预测模型的输入,以便对城市区域的相应任务进行预测。
[0110]
也就是说,使用训练好的城市区域表示对跨领域下游任务进行预测;对于犯罪数量预测、社交网络签到数量预测等回归类型的任务,首先以每个城市区域一段时间内的累计数量(如一年内的累计犯罪数量)为真值,然后使用拉索回归的方法,采用k-fold策略(如,取k=5),将上述方法中学到的城市区域表示作为输入进行预测;对于如土地利用类型预测的聚类任务,使用k均值(k-means)方法,以上述方法中学到的城市区域表示作为输入进行聚类。
[0111]
需要说明的是,相应任务可为社交网络签到数量预测、犯罪数量预测、土地利用类型预测等,本发明对此不作具体限定;且通过评估观察到本发明在多个下游任务的预测中比当前最先进的基线方法最多提高了12.35%,且具有一定的可解释性和泛化能力。
[0112]
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
[0113]
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
[0114]
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
[0115]
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0116]
应当注意的是,在权利要求中,不应将位于括号之间的任何参考符号构造成对权利要求的限制。单词“包含”不排除存在未列在权利要求中的部件或步骤。位于部件之前的单词“一”或“一个”不排除存在多个这样的部件。本发明可以借助于包括有若干不同部件的硬件以及借助于适当编程的计算机来实现。在列举了若干装置的单元权利要求中,这些装置中的若干个可以是通过同一个硬件项来具体体现。单词第一、第二、以及第三等的使用不
表示任何顺序。可将这些单词解释为名称。
[0117]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0118]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
[0119]
在本发明的描述中,需要理解的是,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
[0120]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0121]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0122]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不应理解为必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0123]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1