对象测量方法、装置、计算机设备、可读存储介质和产品与流程
本技术涉及通信,具体涉及一种对象测量方法、装置、计算机设备、可读存储介质和产品,其中,可读存储介质为计算机可读存储介质,产品为计算机程序产品。
背景技术:
1、随着工业制造技术的发展,工业制造中对产品的生产标准越来越高,相应地,对产品尺寸的测量要求也越高,既要保证测量精度,又要测量速度快。而计算机及图像处理技术的飞速发展,使得对产品的测量可以由手工测量转变为机器测量,通常通过基于边缘检测对产品尺寸进行测量:对目标物的图像进行图像边缘检测(如canny算子)来提取目标物的边缘点(灰度变化较大的像素);然后,对边缘点进行合并等处理得到目标物轮廓;根据目标物轮廓即可计算目标物的尺寸。
2、然而,通过边缘检测测量尺寸依赖于边缘检测精度,而边缘点通过单个像素的局部邻域信息确定,在图像的背景中存在干扰边缘点的情况下,得到的轮廓边缘存在不少的干扰边缘点,影响测量准确性和测量精度。
技术实现思路
1、本技术实施例提供一种对象测量方法、装置、计算机设备、可读存储介质和产品,可以提高测量的准确度和精度。
2、本技术实施例提供的一种对象测量方法,包括:
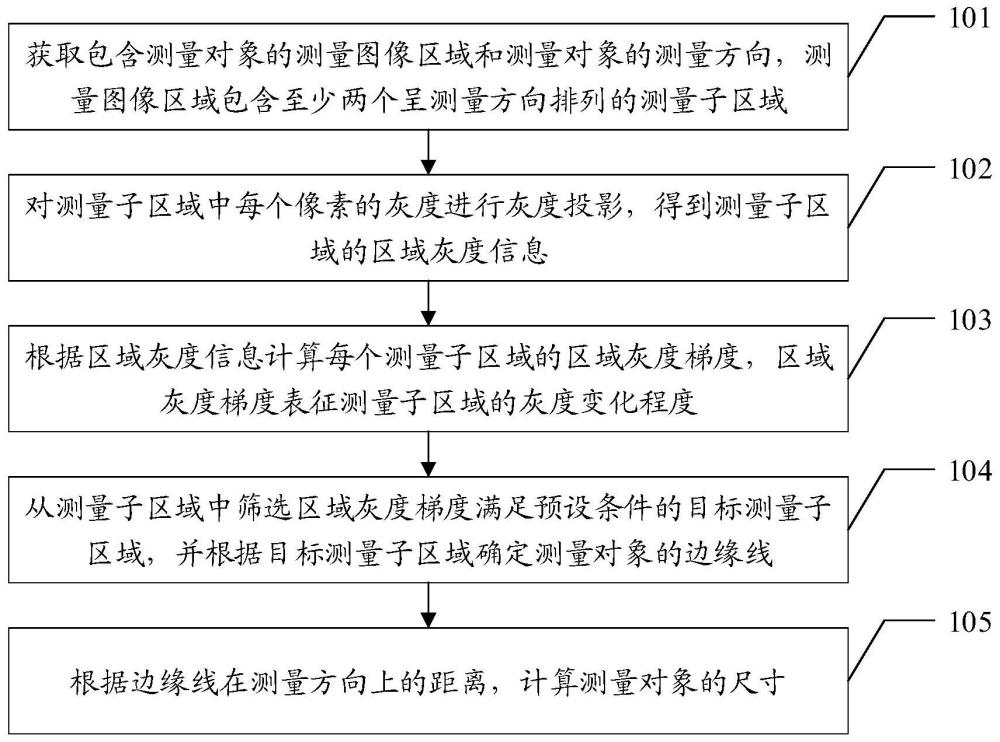
3、获取包含测量对象的测量图像区域和所述测量对象的测量方向,所述测量图像区域包含至少两个呈所述测量方向排列的测量子区域;
4、对所述测量子区域中每个像素的灰度进行灰度投影,得到所述测量子区域的区域灰度信息;
5、根据所述区域灰度信息计算每个所述测量子区域的区域灰度梯度,所述区域灰度梯度表征所述测量子区域的灰度变化程度;
6、从所述测量子区域中筛选所述区域灰度梯度满足预设条件的目标测量子区域,并根据所述目标测量子区域确定所述测量对象的边缘线;
7、根据所述边缘线在所述测量方向上的距离,计算所述测量对象的尺寸。
8、相应的,本技术实施例还提供的一种对象测量装置,包括:
9、获取单元,用于获取包含测量对象的测量图像区域和所述测量对象的测量方向,所述测量图像区域包含至少两个呈所述测量方向排列的测量子区域;
10、投影单元,用于对所述测量子区域中每个像素的灰度进行灰度投影,得到所述测量子区域的区域灰度信息;
11、梯度计算单元,用于根据所述区域灰度信息计算每个所述测量子区域的区域灰度梯度,所述区域灰度梯度表征所述测量子区域的灰度变化程度;
12、筛选单元,用于从所述测量子区域中筛选所述区域灰度梯度满足预设条件的目标测量子区域,并根据所述目标测量子区域确定所述测量对象的边缘线;
13、距离计算单元,用于根据所述边缘线在所述测量方向上的距离,计算所述测量对象的尺寸。
14、在一实施例中,所述获取单元,包括:
15、图像信息获取子单元,用于获取初始待测量图像和模板图像,所述模板图像携带所述测量对象所在图像区域的区域信息和所述测量对象的测量方向;
16、图像校准子单元,用于基于所述模板图像对所述初始待测量图像进行图像校准,得到校准后初始图像;
17、区域映射子单元,用于根据所述区域信息将所述模板图像中图像区域映射至所述校准后初始图像中;
18、校正子单元,用于根据所述测量方向和所述区域信息,对所述校准后初始图像中测量对象所在的图像区域进行区域校正,得到与所述测量对象对应的待测量图像,所述待测量图像包含所述测量图像区域。
19、在一实施例中,所述待测量图像有多张,所述校正子单元,包括:
20、区域校正模块,用于根据所述测量方向和所述区域信息,对所述校准后初始图像中的测量对象所在的图像区域进行区域校正,得到校正后初始图像;
21、图像旋转模块,用于获取在预设角度范围内的多个旋转角度,并基于所述多个旋转角度,分别对所述校准后初始图像进行旋转,得到多个旋转后初始图像;
22、作为模块,用于将不同旋转角度对应的所述旋转后初始图像作为所述待测量图像。
23、在一实施例中,所述筛选单元,包括:
24、选取子单元,用于根据所述区域灰度梯度,分别从每张所述待测量图像对应的多个测量子区域的中选取至少两个目标测量子区域;
25、梯度和计算子单元,用于基于所述至少两个目标测量子区域的灰度梯度,计算每张所述待测量图像的梯度和;
26、图像筛选子单元,用于根据所述梯度和,从所述多张待测量图像中筛选目标待测量图像;
27、区域确定子单元,用于从所述目标待测量图像的目标测量子区域中确定边缘区域,所述边缘区域为所述测量对象的边缘线所在的图像区域。
28、在一实施例中,所述测量图像区域包含多个呈与所述测量方向垂直的方向排列的分段式图像区域,所述分段式图像区域包含所述测量子区域的分段式测量子区域,所述筛选单元,包括:
29、子区域梯度计算子单元,用于分别计算每个分段式图像区域中分段式测量子区域的子区域灰度梯度;
30、子区域筛选子单元,用于从每个所述分段式图像区域包含的分段式测量子区域中,筛选所述子区域灰度梯度满足预设子条件的目标分段式测量子区域;
31、第一边缘线确定子单元,用于根据每个所述目标分段式测量子区域在所述测量图像区域中的位置,确定所述测量对象的边缘线。
32、在一实施例中,所述边缘线确定子单元,包括:
33、位置信息确定模块,用于基于所述目标分段式测量子区域在所述测量图像区域中的位置,确定所述目标分段式测量子区域对应的位置信息;
34、直线拟合模块,用于根据每个所述分段式图像区域中所述目标分段式测量子区域对应的位置信息进行直线拟合,得到所述测量对象的边缘线。
35、在一实施例中,所述测量对象包含至少一个测量单元,所述筛选单元,包括:
36、数量获取子单元,用于获取所述测量图像区域包含的所述测量单元的单元数量;
37、测量子区域筛选子单元,用于根据所述区域灰度梯度,从所述测量子区域中筛选与所述单元数量匹配的目标测量子区域;
38、第二边缘线确定子单元,用于基于所述目标测量子区域在所述测量图像区域中的位置,确定每个所述测量对象中每个所述测量单元的两条边缘线。
39、相应的,本技术实施例还提供的一种计算机设备,包括存储器和处理器;所述存储器存储有计算机程序,所述处理器用于运行所述存储器内的计算机程序,以执行本技术实施例提供的任一种对象测量方法。
40、相应的,本技术实施例还提供一种计算机可读存储介质,所述计算机可读存储介质用于存储计算机程序,所述计算机程序被处理器加载以执行本技术实施例提供的任一种对象测量方法。
41、相应的,本技术实施例还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现本技术实施例提供的任一种对象测量方法。
42、本技术实施例通过获取包含测量对象的测量图像区域和测量对象的测量方向,测量图像区域包含至少两个呈测量方向排列的测量子区域;对测量子区域中每个像素的灰度进行灰度投影,得到测量子区域的区域灰度信息;根据区域灰度信息计算每个测量子区域的区域灰度梯度,区域灰度梯度表征测量子区域的灰度变化程度;从测量子区域中筛选区域灰度梯度满足预设条件的目标测量子区域,并根据目标测量子区域确定测量对象的边缘线;根据边缘线在测量方向上的距离,计算测量对象的尺寸。
43、本方案通过对测量子区域中每个像素的灰度进行灰度投影,能够得到区域灰度梯度,区域灰度梯度可以衡量测量子区域整体灰度变化程度,以整体的灰度变化程度确定边缘线,可以抑制测量图像区域中,灰度变化程度满足条件的像素(即干扰边缘点)的影响,使得基于区域灰度梯度得到的边缘线更加准确,提高测量的准确度和精度。
- 还没有人留言评论。精彩留言会获得点赞!