一种龙门式双轴直线运动平台的刚柔耦合动力学仿真方法与流程
1.本发明涉及动力学仿真分析领域,具体是涉及一种龙门式双轴直线运动平台的刚柔耦合动力学仿真方法。
背景技术:
2.龙门式双轴直线运动平台在设计过程中,为保障台体运行过程中导轨的直线度和定位精度等精度要求,因此设计阶段需校核其动态运动时的刚度,保证台体的应变值在允许范围内,否则后期进行实物测量校对则需要购买完整的应变片等配套的数据设备进行分析,若未满足要求则很难进行实物改造,耗费人力物力。
技术实现要素:
3.为解决上述技术问题,提供一种龙门式双轴直线运动平台的刚柔耦合动力学仿真方法,本技术方案可实现对于龙门式双轴直线运动平台的动力学应变应力仿真模拟计算和振动仿真模拟分析,可减低研发成本、缩短研发周期、提高产品设计的质量、具备很高的经济效益。
4.为达到以上目的,本发明采用的技术方案为:
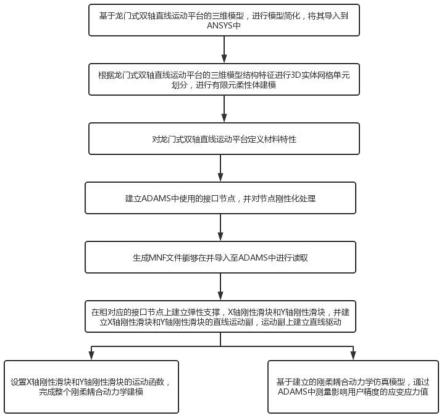
5.一种龙门式双轴直线运动平台的刚柔耦合动力学仿真方法,包括以下步骤:
6.几何处理,基于龙门式双轴直线运动平台的三维模型,进行模型简化,因主要分析滑块运动过程中对导轨和台体的变形,仅保留滑块的主要承载部件以及负载安装的基台,因此在三维模型中删除一些多余部件,仅保留台体、x0导轨和y0导轨,将其导入到ansys中,进行前处理建模;
7.单元网格划分,根据龙门式双轴直线运动平台的三维模型结构特征进行3d实体网格单元划分,进行有限元柔性体建模;
8.材料特性设置,对龙门式双轴直线运动平台定义材料特性;
9.节点设置,建立adams中使用的接口节点,并对建立的接口节点,并对节点进行刚性化处理,为后续在柔性体上建模做好准备;
10.模型文件转化,生成mnf文件能够在并导入至adams中进行读取;
11.建立运动学关系,根据实际台体的工作运行情况,于两导轨上滑块的起始位置点建立滑块质量单元和导轨进行连接,并建立x轴刚性滑块和y轴刚性滑块的直线运动副,运动副上建立直线驱动,整个台体下方建立弹性支撑力元,设置和实物隔振器相同的力学参数,整个弹性力元下方的支架和大地进行固定连接;
12.建立载荷,根据实际滑块的重量,设置滑块单元的质量,为整个台体的主要载荷,其它边界条件根据实际情况进行据实设置;
13.运动学、动力学参数导入,设置x轴刚性滑块和/或y轴刚性滑块的运动函数,完成整个刚柔耦合动力学建模;
14.应变应力仿真模拟计算,基于建立的刚柔耦合动力学仿真模型,通过adams中测量
功能,测量影响用户精度位置处的应变应力值,设置求解步长,及根据行程进行求解时间的设置;
15.预平衡处理,刚柔耦合动力学模型建立完后,由于下方有弹性支撑,因此需进行预平衡位置,将整个台体的仿真初始位置设置为支撑平衡位置处;
16.振动仿真模拟分析,基于建立的刚柔耦合动力学仿真模型,通过adams中的振动模块进行频域振动分析。
17.优选的,所述单元网格划分中进行实体网格单元划分的模型包括台体、x0导轨和y0导轨。
18.优选的,所述材料设置中,对导轨及基台定义大理石材料特性,滑块定义为铝合金材料特性。
19.优选的,所述节点设置中,建立的接口节点包括整个台体的弹性隔振支撑位置,两导轨上和滑块接触的起始位置点,整个基台上需测量的危险位置点。
20.优选的,所述应变应力仿真模拟计算包括如下步骤:
21.设置测量台体应变参数、重力加速度;
22.求解步长设置,选取合适的计算步长校核求解问题;
23.设置运动工况,运行模型,获取计算结果。
24.优选的,所述振动仿真模拟分析包括如下步骤:
25.建立输入通道,设置逼近实际情况的激振器;
26.设置激振器类型及激振方向;
27.建立输出通道,通道类型及方向;
28.设置振动分析工况,设置激振扫频范围及步长,运行振动分析。
29.优选的,所述振动仿真模拟分析的具体方法为:
30.仿真开始时,滑块在两导轨上同时作往复运动,测量点实时显示测量点应变变化,得到仿真结果后,对结果进行处理,获取台体的频率响应曲线等需要的结果。
31.与现有技术相比,本发明的优点在于:
32.本方案可实现对于龙门式双轴直线运动平台的动力学应变应力仿真模拟计算和振动仿真模拟分析,可实现对于龙门式双轴直线运动平台的动力学响应模拟,在设计阶段即可校核龙门式双轴直线运动平台在进行动态运动时的刚度,保证台体的应变值在允许范围内,进而减低研发成本、缩短研发周期、提高产品设计的质量、具备很高的经济效益。
33.本方案可对整个台体进行振动仿真模拟分析,通过分析振动数据结果,从而有针对性地进行隔振系统设计。
附图说明
34.图1为本发明中提出的仿真方法流程示意图;
35.图2为本发明中的龙门式双轴直线运动平台的模型图;
36.图3为本发明中的龙门式双轴直线运动平台的模型简化图;
37.图4为本发明中划分网格后模型示意图;
38.图5为本发明中接口节点及导出到adams示意图;
39.图6为本发明中建立弹性支撑,x轴和y轴刚性滑块后的模型示意图;
40.图7为本发明中进行运动函数设定的示意图;
41.图8本发明中的运动函数设定及预平衡成功示意图;
42.图9为进行仿真计算时示意图;
43.图10为实施例中工况1状态下的大理石平板垂向变形折线图;
44.图11为实施例中工况1状态下的x0导轨垂向变形折线图;
45.图12为实施例中工况1状态下的x0导轨横向变形折线图;
46.图13为实施例中工况2y轴负载运动函数设定界面;
47.图14为实施例中工况2状态下的大理石平板垂向变形折线图;
48.图15为实施例中工况2状态下的x0导轨垂向变形折线图;
49.图16为实施例中工况2状态下的x0导轨横向变形折线图;
50.图17为台体的前七阶固有频率示意图;
51.图18为设置扫频激励界面图;
52.图19为设置输出响应界面图;
53.图20为振动分析设置频率范围界面图;
54.图21为横向扫频下的频率响应曲线;
55.图22为垂向扫频下的频率响应曲线。
具体实施方式
56.以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
57.参照图1所示,一种龙门式双轴直线运动平台的刚柔耦合动力学仿真方法,其特征在于,包括以下步骤:
58.几何处理:基于如图2所示龙门式双轴直线运动平台的三维模型,进行如图3所示的模型简化,因主要分析滑块运动过程中对导轨和台体的变形,仅保留滑块的主要承载部件以及负载安装的基台,因此在三维模型中删除一些多余部件,仅保留台体1、x0导轨2和y0导轨3,将其导入到ansys中,进行前处理建模;
59.单元网格划分:根据龙门式双轴直线运动平台的三维模型结构特征,对台体1、x0导轨2和y0导轨3进行3d实体网格单元划分,进行有限元柔性体建模,结果如图4所示;
60.材料特性设置:对导轨及基台定义大理石材料特性,滑块定义为铝合金材料特性;
61.节点设置:建立adams中使用的接口节点,建立的接口节点包括整个台体的弹性隔振支撑位置,两导轨上和滑块接触的起始位置点,整个基台上需测量的危险位置点,总共10个接口节点,并对节点进行刚性化处理,为后续在柔性体上建模做好准备;
62.模型文件转化:设定单位后通过ansys中输出adams的接口生成mnf文件,并导入至adams中进行读取,结节点设置以及文件导入adams的示意图如图5所示;
63.建立运动学关系,根据实际台体的工作运行情况,于两导轨上滑块的起始位置点建立滑块质量单元和导轨进行连接,并建立x轴刚性滑块和y轴刚性滑块的直线运动副,运动副上建立直线驱动,整个台体下方建立弹性支撑力元,设置和实物隔振器相同的力学参数,整个弹性力元下方的支架和大地进行固定连接;
64.建立载荷,根据实际滑块的重量,设置滑块单元的质量,为整个台体的主要载荷,
其它边界条件根据实际情况进行据实设置,设定后结构如图6所示;
65.运动学、动力学参数导入,设置x轴刚性滑块和/或y轴刚性滑块的运动函数,完成整个刚柔耦合动力学建模,函数设定后模型示意图如图7所示;
66.应变应力仿真模拟计算:基于建立的刚柔耦合动力学仿真模型,通过adams中测量功能,测量影响用户精度位置处的应变应力值,设置求解步长,及根据行程进行求解时间的设置;
67.如图8-9所示,应变应力仿真模拟计算的具体步骤包括:设置测量台体应变参数、重力加速度;预平衡处理,刚柔耦合动力学模型建立完后,由于下方有弹性支撑,因此需进行预平衡位置,将整个台体的仿真初始位置设置为支撑平衡位置处;求解步长设置,选取合适的计算步长校核求解问题;设置运动工况,运行模型,获取计算结果;
68.本实施例中,设定有如下状态进行仿真模拟:
69.工况1,在x0导轨2上设置滑块运动模式,运动函数设置为:
70.v=5000t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
0≤t≤0.2
71.v=1000
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
0.2≤t≤4.2
72.v=1000-5000(t-3.4)
ꢀꢀꢀꢀ
4.2≤t≤4.4
73.v=-1000
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
4.4≤t≤4.6
74.v=-1000+5000(t-6.6)
ꢀꢀꢀ
8.6≤t≤8.8
75.工况1状态下,x0导轨2上负载一个运动周期分为五个阶段,加速到最大速度,匀速运动,减速到0,反向加速到最大速度,匀速运动,减速到0,行程全程4.2m,周期8.8s,覆盖了整个工作区间,与实际的运动工况基本一致,因为速度和加速度越大,其整个台体的动力学行为越恶劣,对台体造成的动态载荷越大,因此加减速过程都为最大加速度,从而计算所需应变大小,记录检测工况1状态下的大理石平板垂向变形折线图如图10所示,工况1状态下的x0导轨2垂向变形折线图如图11所示;工况1状态下的x0导轨2横向变形折线图如图12所示。
76.工况2,在工况1的运动基础上,增加y0导轨3上负载的移动,最大加速度0.25g,最大速度500mm/s。分为最大加速度加速到最大速度,再以最大速度匀速运动,再以最大速度匀速运动,再减速到0,覆盖其350mm行程,周期为x0导轨2上负载从起始点开始来回一个周期,周期8.8s,y0导轨3负载运动函数设定如图13所示,由于双滑块运动解算极为复杂,因此计算步长设置为0.0005s,记录检测工况2状态下的大理石平板垂向变形折线图如图14所示,工况2状态下的x0导轨2垂向变形折线图如图15所示;工况2状态下的x0导轨2横向变形折线图如图16所示
77.振动仿真模拟分析:基于建立的刚柔耦合动力学仿真模型,通过adams中的振动模块进行频域振动分析;
78.振动仿真模拟分析具体步骤包括:建立输入通道,设置逼近实际情况的激振器;设置激振器类型及激振方向;建立输出通道,通道类型及方向;设置振动分析工况,设置激振扫频范围及步长,运行振动分析。
79.振动仿真模拟分析首先需要得到结构的固有频率,一般只需分析前六阶固有频率,下面通过模态分析,得到该台体刚性支撑下的前七阶固有频率,如图17所示,台体结构的一阶固有频率为50hz左右,之后通过对台体进行扫频分析,找到结构的在弹性支撑下的
激振点,通过adams的vibration模块进行adams中的振动分析,如图18-20所示,设置输入扫频激励函数,作用点为x0导轨2上滑块的起始位置,进行振动分析,图21-22分别为横向扫频下的频率响应曲线和垂向扫频下的频率响应曲线,从图21-22可以看出两方向下激振,台体平板和x0导轨2响应的共振点基本保持在2.5hz到3.5hz之间,对整个台体进行振动仿真模拟分析,通过分析振动数据结果,从而可针对性地进行隔振系统设计。
80.综上所述,本发明的优点在于:基于adams和ansys环境建立了刚柔耦合动力学模型,对于龙门式双轴直线运动平台的动力学应变应力仿真模拟计算和振动仿真模拟分析,可减低研发成本、缩短研发周期、提高产品设计的质量、具备很高的经济效益。
81.以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1