基于初值优选的地心引力波测量星座构型半解析优化方法
1.本发明涉及一种基于初值优选的地心引力波测量星座构型半解析优化方法,尤其适用于复杂摄动环境下的地心引力波测量星座的高几何稳定性构型优化,属于航空航天技术领域。
背景技术:
2.几何稳定的星座设计是进行地球重力场测量、空间引力波探测等活动的基础。受到各种摄动力的影响,高精度动力学模型下长期几何稳定的星座设计与优化是一个难题,目前一般是采用数值优化算法直接从稳定性很差的标称初值出发,通过调节各状态分量上下界搜索满足稳定性需求的星座初始参数,计算量很大,效率较低。所以亟需寻找解析或者半解析的优化方法,代替盲目的纯数值优化,进行高效可靠的高稳定性引力波测量星座优化求解。
3.在已发展的关于地心引力波测量星座构型优化先技术[1](参见ye b b,zhang x,zhou m y,et al.optimizing orbits for tianqin[j].international journal of modern physics d,2019,28(09):1950121.)提出天琴空间引力波探测任务的稳定星座组合优化方法,虽然先采取半解析方法进行降维,但是精度不高,与数值优化结果差距较大,所以仍需采用数值优化算法进行大量计算,效率偏低。
技术实现要素:
[0004]
为解决长期稳定引力波测量星座优化效率低的问题。本发明的目的是提供一种基于初值优选的地心引力波测量星座构型半解析优化方法,首先构建考虑偏心率的带补偿平均纬度幅角偏差的地心引力波测量星座构型内迭代优化模型,然后建立基于初值优选更新的地心引力波测量星座构型外迭代优化模型,进行长期强稳定性要求的引力波测量星座构型优化求解,实现考虑多个稳定性指标的具有长期强稳定性的引力波测量星座构型高效优化。本发明具有优化效率高、适用范围广的优点。
[0005]
本发明的目的是通过下述技术方案实现的:
[0006]
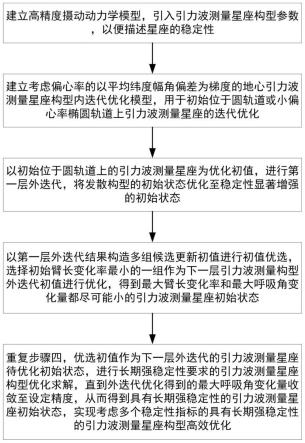
本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法,建立高精度摄动动力学模型,引入引力波测量星座构型参数,以便描述星座的稳定性;建立考虑偏心率的以平均纬度幅角偏差为梯度的地心引力波测量星座构型内迭代优化模型,用于初始位于圆轨道或小偏心率椭圆轨道上引力波测量星座的迭代优化;以初始位于圆轨道上的引力波测量星座为优化初值,进行第一层外迭代,将发散构型的初始状态优化至稳定性显著增强的初始状态;以第一层外迭代结果构造多组候选更新初值进行初值优选,选择初始臂长变化率最小的一组作为下一层引力波测量构型外迭代初值进行优化,得到最大臂长变化率和最大呼吸角变化量都尽可能小的引力波测量星座初始状态;重复外迭代优化,优选初值作为下一层外迭代的引力波测量星座待优化初始状态,进行长期强稳定性要求的引力波测量星座构型优化求解,直到外迭代优化得到的最大呼吸角变化量收敛至设定精度,从而
得到具有长期强稳定性的引力波测量星座初始状态,实现考虑多个稳定性指标的具有长期强稳定性的引力波测量星座构型高效优化。
[0007]
本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法,包括如下步骤:
[0008]
步骤一:建立高精度摄动动力学模型,引入引力波测量星座构型参数,以便描述星座的稳定性。
[0009]
建立中心天体的多摄动动力学模型为
[0010][0011]
其中,rc为航天器在中心天体惯性系中的位置矢量,μc为中心天体引力常数,an为中心天体非球形摄动加速度,a
srp
为太阳光压摄动加速度,rm为太阳系大天体在中心天体惯性系中的位置矢量,μm为除了中心天体之外的太阳系大天体的引力常数,m=1,2,...,11,分别代表水星、金星、地球、火星、木星、土星、天王星、海王星、冥王星、月球、太阳。
[0012]
在引力波测量星座构型中,三个航天器分别为si,i=1,2,3,每两个航天器之间的距离定义为臂长,为l
ij
,i=1,2,3,j=1,2,3,i≠j,后续步骤出现的i,j与此处意义相同,不再赘述,臂长变化率定义为以一个航天器为顶点、与另外两个航天器连线为边形成的角定义为呼吸角θi。对于正三角星座构型,θ1=θ2=θ3=60
°
。
[0013]
步骤二:建立考虑偏心率的以平均纬度幅角偏差为梯度的地心引力波测量星座构型内迭代优化模型,用于初始位于圆轨道或小偏心率椭圆轨道上引力波测量星座的迭代优化。
[0014]
定义一个航天器与另外两个航天器过中心的中垂线的角度距离定义为纬度幅角偏差κi,κi越大表明正三角星座变形越严重。采用平均化方法,任务周期内三个航天器对应的平均纬度幅角偏差为
[0015][0016]
其中,为任务周期内每个航天器带补偿的平均呼吸角,且
[0017][0018]
其中,为任务周期内每个航天器的真实平均呼吸角,η为带方向的补偿系数,σi为任务周期内呼吸角的标准差。
[0019]
对于圆轨道或偏心率很小的近圆轨道,每个航天器角速度为
[0020][0021]
其中,ai为每个航天器的半长轴。
[0022]
通过迭代调整每个航天器的半长轴,幅角偏差逐渐减小,达到减小平均呼吸角偏差的目的。迭代需满足条件
[0023][0024]
其中,γ为幅角偏差调节时长,ni′
为调节后的角速度。进而得
[0025][0026]
然后每个航天器的初始位置矢量和速度矢量根据迭代后的半长轴与保持不变的其他轨道根数能够得到。
[0027]
式(6)为内迭代优化提供必要的梯度信息,用于初始位于圆轨道或小偏心率近圆轨道上星座初值的迭代优化。
[0028]
步骤三:以初始位于圆轨道上的引力波测量星座为优化初值,进行第一层外迭代,将发散构型的初始状态优化至稳定性显著增强的初始状态。
[0029]
引力波测量星座受到关注的几何稳定性能参数有最大呼吸角变化量δθ、最大臂长变化率最大臂长变化比例δl,所以外迭代优化的目的是使得所述三个性能参数尽可能小,从而星座尽可能稳定性。
[0030]
三个航天器的标称轨道为同一个圆轨道,三个航天器初始状态记为
[0031][0032]
其中,为第一层外迭代的星座标称初始状态,分别为第一层外迭代每个航天器的半长轴、偏心率、轨道倾角、升交点赤经、近地点幅角、真近点角的初值,且t为转置符号,上式中的上标表示外迭代次数,后续步骤出现的上标与此处意义相同。对应的优化前星座的性能参数为δθ0,δl0。
[0033]
采用式(6)进行内迭代,记内迭代的次数为m,每次内迭代初始半长轴为a
′i(m),对应的星座性能参数为δθ(m),δl(m)。设置内迭代收敛精度为ρ,若满足
[0034]
|δθ(m)-δθ(m-1)|<ρ
ꢀꢀꢀ
(8)
[0035]
则内迭代停止,否则,继续第m+1次内迭代,直至满足上式。从而,得到第一层外迭代的优化后星座初始状态为
[0036][0037]
对应的第一层外迭代优化后引力波测量星座的性能参数为δθ1,δl1。
[0038]
步骤四:以第一层外迭代结果构造多组候选更新初值进行初值优选,选择初始臂
长变化率最小的一组作为下一层引力波测量构型外迭代初值进行优化,得到最大臂长变化率和最大呼吸角变化量都尽可能小的引力波测量星座初始状态。
[0039]
将第一层外迭代得到的结果中三个航天器的状态分别正向和逆向积分1/3个轨道周期,得到的末端状态分别赋予另外两个航天器,即形成了三组引入偏心率的引力波测量星座构型第二层外迭代候选优化初值,即
[0040][0041]
其中,t0为初始时刻,ts为星座初始轨道周期。
[0042]
从上式中选取初始时刻臂长变化率最小的一组作为第二层外迭代正式优化初值,采用式(6)进行内迭代,直至满足式(8)的内迭代收敛精度约束。从而,得到第二层外迭代的优化后星座初始状态为
[0043][0044]
对应的第二层外迭代优化后引力波测量星座的性能参数为δθ2,δl2。
[0045]
步骤五:重复步骤四,优选初值作为下一层外迭代的引力波测量星座待优化初始状态,进行长期强稳定性要求的引力波测量星座构型优化求解,直到外迭代优化得到的最大呼吸角变化量收敛至设定精度,从而得到具有长期强稳定性的引力波测量星座初始状态,实现考虑多个稳定性指标的具有长期强稳定性的引力波测量星座构型高效优化。
[0046]
记第j次外迭代优化后,引力波测量星座初始状态为
[0047][0048]
对应的第j层外迭代优化后引力波测量星座的性能参数为δθj,δlj。
[0049]
执行式(10)的初值优选过程,进行第j+1次外迭代,直至最大呼吸角变化量收敛至预设精度σ,即
[0050]
|δθ
j+1-δθj|<σ,j≥2
ꢀꢀꢀ
(13)
[0051]
至此,得到具有长期强稳定性的引力波测量构型初始状态,实现考虑多个稳定性指标的具有长期强稳定性的引力波测量星座构型高效优化。相较于传统的数值优化,本发明优化效率显著提高。
[0052]
还包括步骤六:根据步骤五得到的具有长期强稳定性的引力波测量星座初始状态,作为引力波测量任务星座部署的末端约束,进行长期强稳定性的引力波测量,星座的呼吸角和臂长变化率都保持很强的稳定性,有利于空间引力波的稳定干涉测量。
[0053]
有益效果
[0054]
1、本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法,选择初始臂长变化率最小的一组作为下一层引力波测量构型外迭代初值进行优化,得到最大臂长变化率和最大呼吸角变化量都尽可能小的引力波测量星座初始状态,即基于初值优选的地心引力波测量星座构型半解析优化方法,对长期几何稳定性要求很高的地心引力波测量
星座初始状态的优化适用性强。
[0055]
2、本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法,通过构建考虑偏心率的带补偿平均纬度幅角偏差的地心引力波测量星座构型内迭代优化模型,在内迭代模型基础上,建立基于初值优选更新的地心引力波测量星座构型外迭代优化模型,通过内迭代和外迭代循环优化求解,具有高稳定性的引力波测量星座初始状态,创新性地将带补偿纬度幅角作为内迭代梯度信息、外迭代初值优选更新策略能够代替传统的智能算法数值优化,优化效率显著提高、精度高、可靠性强。
[0056]
3、本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法,建立的高精度摄动动力学模型中,中心天体可以选择地球之外的其他大天体,摄动力项可以根据任务约束进行调整,对引力波测量星座的高度和朝向也无限制,因此鲁棒性强、适用范围广。
[0057]
4、本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法,基于纬度幅角偏差为梯度进行优化,对于非正三角形或多星星座优化,只需根据标称纬度幅角计算相应的偏差值作为梯度信息即可,所以可扩展性强。
附图说明
[0058]
图1为本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法流程图。
[0059]
图2为本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法的引力波测量星座构型参数示意图;
[0060]
图3为本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法求解实施例1得到的引力波测量星座构型参数迭代优化过程,图3(a)为整体迭代优化过程图,图3(b)为局部放大迭代优化过程图;
[0061]
图4为本发明公开的基于初值优选的地心引力波测量星座构型半解析优化方法求解实施例1得到的稳定星座在任务周期内的星座构型参数演化曲线。
具体实施方式
[0062]
为了更好地说明本发明的目的和优点,下面结合具体实施示例对本发明做出详细解释。
[0063]
实施例1:
[0064]
以“天琴”引力波探测任务中的正三角星座为例,地心赤道惯性系下引力波测量星座每个航天器的初始状态如表1所示,任务时长为5年,初始时刻为2034/05/22 12:00:00utc。优化前标称初始状态对应的最大呼吸角变化量达到δθ0=24.8
°
,最大臂长变化率达到最大臂长变化比例达到δl0=33.5312%,星座严重变形。
[0065]
表1“天琴”引力波测量星座初始状态(ej2000equ,2034/05/22 12:00:00 utc)
[0066][0067]
本实施例公开的一种基于初值优选的地心引力波测量星座构型半解析优化方法,如图1所示,具体实现步骤如下:
[0068]
步骤一:建立高精度摄动动力学模型,引入引力波测量星座构型参数,以便描述星座的稳定性。
[0069]
建立中心天体的多摄动动力学模型为
[0070][0071]
其中,rc为航天器在中心天体惯性系中的位置矢量,μc为中心天体引力常数,an为中心天体非球形摄动加速度,a
srp
为太阳光压摄动加速度,rm为太阳系大天体在中心天体惯性系中的位置矢量,μm为除了中心天体之外的太阳系大天体的引力常数,m=1,2,...,11,分别代表水星、金星、地球、火星、木星、土星、天王星、海王星、冥王星、月球、太阳。
[0072]
在引力波测量星座构型中(如图2所示),三个航天器分别为si,i=1,2,3,每两个航天器之间的距离定义为臂长,为l
ij
,i=1,2,3,j=1,2,3,i≠j,后续步骤出现的i,j与此处意义相同,不再赘述,臂长变化率定义为以一个航天器为顶点、与另外两个航天器连线为边形成的角定义为呼吸角θi。对于正三角星座构型,θ1=θ2=θ3=60
°
。
[0073]
步骤二:建立考虑偏心率的以平均纬度幅角偏差为梯度的地心引力波测量星座构型内迭代优化模型,用于初始位于圆轨道或小偏心率椭圆轨道上引力波测量星座的迭代优化。
[0074]
定义一个航天器与另外两个航天器过中心的中垂线的角度距离定义为纬度幅角偏差κi,κi越大表明引力波测量星座变形越严重。采用平均化思想,任务周期内三个航天器对应的平均纬度幅角偏差为
[0075][0076]
其中,为任务周期内每个航天器带补偿的平均呼吸角,且
[0077][0078]
其中,为任务周期内每个航天器的真实平均呼吸角,η为带方向的补偿系数,σi为任务周期内呼吸角的标准差。
[0079]
对于圆轨道或偏心率很小的近圆轨道,每个航天器角速度为
[0080][0081]
其中,ai为每个航天器的半长轴。
[0082]
通过迭代调整每个航天器的半长轴,幅角偏差逐渐减小,达到减小平均呼吸角偏差的目的。迭代需满足条件
[0083][0084]
其中,γ为幅角偏差调节时长,ni′
为调节后的角速度。进而可得
[0085][0086]
然后每个航天器的初始位置矢量和速度矢量根据迭代后的半长轴与保持不变的其他轨道根数可以得到。
[0087]
式(19)为内迭代优化提供了必要的梯度信息,用于初始位于圆轨道或小偏心率近圆轨道上星座初值的迭代优化。
[0088]
步骤三:以初始位于圆轨道上的引力波测量星座为优化初值,进行第一层外迭代,将发散构型的初始状态优化至稳定性显著增强的初始状态。
[0089]
引力波测量星座受到关注的几何稳定性能参数有最大呼吸角变化量δθ、最大臂长变化率最大臂长变化比例δl,所以外迭代优化的目的是使得这三个性能参数尽可能小,从而星座尽可能稳定性。
[0090]
三个航天器的标称轨道为同一个圆轨道,三个航天器初始状态记为
[0091][0092]
其中,为第一层外迭代的星座标称初始状态,分别为第一层外迭代每个航天器的半长轴、偏心率、轨道倾角、升交点赤经、近地点幅角、真近点角的初值,且t为转置符号,上式中的上标表示外迭代次数,后续步骤出现的上标与此处意义相同。对应的优化前星座的性能参数为δθ0,δl0。
[0093]
采用式(19)进行内迭代,记内迭代的次数为m,每次内迭代初始半长轴为a
′i(m),对应的星座性能参数为δθ(m),δl(m)。设置内迭代收敛精度为ρ=10-4
度,若满足
[0094]
|δθ(m)-δθ(m-1)|<ρ
ꢀꢀꢀ
(21)
[0095]
则内迭代停止,否则,继续第m+1次内迭代,直至满足上式。从而,得到第一层外迭代的优化后星座初始状态为
[0096][0097]
对应的第一层外迭代优化后引力波测量星座的性能参数为δθ1,δl1。
[0098]
步骤四:以第一层外迭代结果构造多组候选更新初值进行初值优选,选择初始臂长变化率最小的一组作为下一层引力波测量构型外迭代初值进行优化,得到最大臂长变化率和最大呼吸角变化量都尽可能小的引力波测量星座初始状态。
[0099]
将第一层外迭代得到的结果中三个航天器的状态分别正向和逆向积分1/3个轨道周期,得到的末端状态分别赋予另外两个航天器。这样就形成了三组引入了偏心率的星座构型第二层外迭代候选优化初值,即
[0100][0101]
其中,t0为初始时刻,ts为星座初始轨道周期。
[0102]
从上式中选取初始时刻臂长变化率最小的一组作为第二层外迭代正式优化初值,采用式(19)进行内迭代,直至满足式(21)的内迭代收敛精度约束。从而,得到第二层外迭代的优化后星座初始状态为
[0103][0104]
对应的第二层外迭代优化后引力波测量星座的性能参数为δθ2,δl2。
[0105]
步骤五:重复步骤四,优选初值作为下一层外迭代的引力波测量星座待优化初始状态,进行长期强稳定性要求的引力波测量星座构型优化求解,直到外迭代优化得到的最大呼吸角变化量收敛至设定精度,从而得到具有长期强稳定性的引力波测量星座初始状态,实现考虑多个稳定性指标的具有长期强稳定性的引力波测量星座构型高效优化。
[0106]
记第j次外迭代优化后,引力波测量星座初始状态为
[0107][0108]
对应的第j层外迭代优化后引力波测量星座的性能参数为δθj,δlj。
[0109]
执行式(23)的初值优选过程,进行第j+1次外迭代,直至最大呼吸角变化量收敛至预设精度σ=10-4
度,即
[0110]
|δθ
j+1-δθj|<σ,j≥2
ꢀꢀꢀ
(26)
[0111]
经过5层外迭代(共78次内迭代),“天琴”标称三角星座的最大呼吸角变化量收敛至σ=10-4
度,对应的任务周期t=5yr内的最大呼吸角变化量减小至δθ5=0.1178
°
,相较于优化前的δθ0=24.8
°
星座几何稳定性大大增强。图3给出了最大呼吸角变化量的迭代收敛过程以及对应的最大臂长变化率和最大臂长变化比例迭代过程,可以看出星座最大呼吸角变化量在每次内迭代和外迭代中分别逐步减小,最大臂长变化率和最大臂长变化比例也在相应减小,星座稳定性能逐步增强。图4给出了优化后“天琴”星座在任务周期内三个构型参数的演化情况,表2给出了迭代优化后“天琴”星座的初始状态。
[0112]
表2优化后“天琴”引力波测量星座初始状态(ej2000equ,2034/05/22 12:00:00 utc)
[0113][0114]
至此,得到具有长期强稳定性的引力波测量星座初始状态。实施例1采用本发明方法的优化时长约22分钟,而采用传统的智能优化算法直接对标称初始状态进行优化,得到相同最优程度的初始状态需要约96小时,所以本发明方法相较于传统的数值优化效率显著提高。
[0115]
步骤六:根据步骤五得到的具有长期强稳定性的引力波测量星座初始状态,作为引力波测量任务星座部署的末端约束,进行长期强稳定性的引力波测量,星座的呼吸角和臂长变化率都保持很强的稳定性,有利于空间引力波的稳定干涉测量。
[0116]
所述长期指5年以上。
[0117]
以上所述的具体描述,对发明的目的、技术方案和优点进行了进一步详细说明。需要理解的是,以上所述仅为本发明的具体实施示例,用于解释本发明,并不用于限定本发明的保护范围。凡在本发明的精神和原则之内所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1