检测结果的生成方法、装置、电子设备及可读存储介质
1.本发明涉及康复技术领域,尤其是一种检测结果的生成方法、装置、电子设备及计算机可读存储介质。
背景技术:
2.康复评定是检查、判断患者功能障碍的性质、部位、范围、程度;确定尚存的代偿能力情况。
3.由于各种原因,我国每年都会新增大量的运动功能丧失或者障碍的患者。这些患者往往需要进行多次的康复评定。
4.为了实现康复评定,现有技术中,患者往往需要频繁前往康复医院进行运动功能评定,由医生告知患者做出指定的动作,然后医生通过人为检测该患者做出动作的完成情况,并做出评分。
5.但是,现有技术中,人为检测患者动作完成情况不准确。
技术实现要素:
6.本技术的目的是提供了一种检测结果的生成方法、装置、电子设备及计算机可读存储介质,能够更准确的检测患者的动作完成情况。
7.根据本技术的第一方面,提供了检测结果的生成方法,该方法包括:
8.获取终端设备采集的运动视频;其中,运动视频包括肢体运动图像;
9.基于骨架捕捉方法对肢体运动图像中的骨架信息进行捕捉;其中,骨架信息包括多个骨架节点的三维坐标;
10.基于目标检测算法对骨架节点的三维坐标进行检测,生成第一检测结果。
11.可选的,骨架捕捉方法为openpose的骨架捕捉方法,基于骨架捕捉方法对肢体运动图像中的骨架信息进行捕捉,包括:
12.基于第一神经网络模型对肢体运动图像中的骨架信息进行捕捉。
13.可选的,肢体运动图像包括手部运动图像,方法还包括:
14.基于目标检测算法对手部运动图像进行检测,生成第二检测结果;其中,手部运动图像包括手抓物体时的运动状态。
15.基于目标检测算法对手部运动图像进行检测,生成第二检测结果,包括:
16.基于目标检测算法获取物体的重力;
17.基于目标检测算法识别物体的种类;
18.基于目标检测算法对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
19.可选的,基于目标检测算法获取物体的重力,包括:
20.基于目标检测算法识别物体的颜色;
21.获取物体的颜色与物体的重力之间的预设映射关系;
22.基于预设映射关系以及物体的颜色确定物体的重力。
23.可选的,目标检测算法为yolox目标检测算法,基于目标检测算法对骨架节点的三维坐标进行检测,生成第一检测结果,包括:
24.获取第二神经网络模型;
25.基于第二神经网络模型对骨架节点的三维坐标进行检测,生成第一检测结果;
26.基于目标检测算法获取物体的重力,包括
27.基于第二神经网络模型获取物体的重力;
28.基于目标检测算法识别物体的种类,包括:
29.基于第二神经网络模型识别物体的种类;
30.基于目标检测算法对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果,包括:
31.基于第二神经网络模型对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
32.可选的,获取终端设备采集的运动视频,包括:
33.获取终端设备的深度相机采集的运动视频。
34.根据本技术的第二方面,提供了一种检测结果的生成装置,该装置包括:
35.获取模块,用于获取终端设备采集的运动视频;其中,运动视频包括肢体运动图像;捕捉模块,用于基于骨架捕捉方法对肢体运动图像中的骨架信息进行捕捉;其中,骨架信息包括多个骨架节点的三维坐标;第一生成模块,用于基于目标检测算法对骨架节点的三维坐标进行检测,生成第一检测结果。
36.可选的,捕捉模块,用于获取第一神经网络模型;基于第一神经网络模型对肢体运动图像中的骨架信息进行捕捉;其中,骨架捕捉方法为openpose的骨架捕捉方法。
37.可选的,装置还包括:第二生成模块,用于基于目标检测算法对手部运动图像进行检测,生成第二检测结果;其中,手部运动图像包括手抓物体时的运动状态,肢体运动图像包括手部运动图像。
38.可选的,第二生成模块,用于基于目标检测算法获取物体的重力;基于目标检测算法识别物体的种类;基于目标检测算法对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
39.可选的,第二生成模块,用于基于目标检测算法识别物体的颜色;获取物体的颜色与物体的重力之间的预设映射关系;基于预设映射关系以及物体的颜色确定物体的重力。
40.可选的,目标检测算法为yolox目标检测算法,第一生成模块,用于获取第二神经网络模型;基于第二神经网络模型对骨架节点的三维坐标进行检测,生成第一检测结果;第二生成模块,用于基于第二神经网络模型获取物体的重力,基于第二神经网络模型识别物体的种类,基于第二神经网络模型对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
41.可选的,获取模块,用于获取终端设备的深度相机采集的运动视频。
42.根据本技术的第三方面,提供了一种电子设备,该电子设备包括处理器、存储器及存储在存储器上并可在处理器上运行的程序或指令,程序或指令被处理器执行时实现如第一方面所示的检测结果的生成方法的步骤。
43.根据本技术的第四方面,提供了一种可读存储介质,该可读存储介质上存储程序或指令,程序或指令被处理器执行时实现如第一方面所示的检测结果的生成方法的步骤。
44.本技术可以由云端服务器作为本技术的执行主体,其中,云端服务器和终端设备建立通信关系。终端设备采集用户运动视频。其中,运动视频包括肢体运动图像,并发送给云端服务器,云端服务器根据骨架捕捉方法捕捉到肢体运动图像中多个骨架节点的三维坐标,云端服务器根据目标检测算法对骨架节点的三维坐标进行检测,生成检测结果。即通过云端服务器和终端设备之间的数据互通实现更准确地对患者动作完成情况的检测。
附图说明
45.为了更清楚地说明本技术具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本技术的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
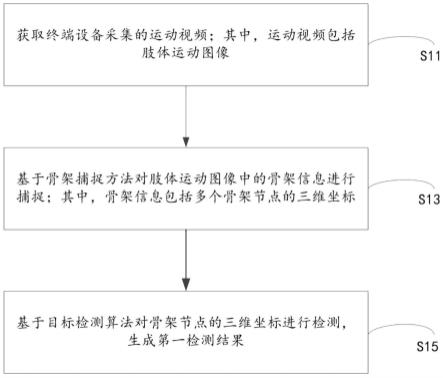
46.图1为本技术实施例提供的检测结果的生成方法的流程图;
47.图2为本技术实施例提供的肢体运动图像中骨架信息的示意图;
48.图3为本技术实施例提供的手部运动图像的检测结果的示意图;
49.图4为本技术实施例提供的手部运动图像中物体重力的示意图;
50.图5为现有技术提供的评估报告的示意图;以及
51.图6为本技术实施例提供的检测结果的生成装置的示意图。
具体实施方式
52.为了使本技术的上述以及其他特征和优点更加清楚,下面结合附图进一步描述本技术。应当理解,本文给出的具体实施例是出于向本领域技术人员解释的目的,仅是示例性的,而非限制性的。
53.在以下描述中,阐述了许多具体细节以提供对本技术的透彻理解。然而,对于本领域普通技术人员来说将明显的是,不需要采用具体细节来实践本技术。在其他情况下,未详细描述众所周知的步骤或服务,以避免模糊本技术。
54.基于背景技术部分的内容可知,现有技术中人为检测患者动作完成情况不准确。
55.为了解决上述技术问题,本技术提供一种检测结果的生成方法、装置、电子设备及计算机可读存储介质。下面结合附图,通过具体的实施例及其应用场景先对本技术提供的检测结果的生成方法进行详细地说明。
56.如图1所示,本技术提供的检测结果的生成方法,可以包括:
57.步骤s11:获取终端设备采集的运动视频;其中,运动视频包括肢体运动图像。
58.具体的,在本技术中,可以由云端服务器作为本技术的执行主体。其中,云端服务器可以和终端设备建立通信关系,终端设备可以通过终端设备自带的摄像头对患者进行摄像,即将患者按照医学检测标准做出相应的动作进行采集,然后可以将实时的rgb图像上传至云端服务器,其中,运动视频包括肢体运动图像。能够使得患者可以随时随地进行完成动作质量的检测。
59.需要说明的是,肢体运动图像可以包括身体的左臂、右臂、左腿以及右腿、手指、足
等。
60.可选的,终端设备可以为电脑,手机等带有录像和/或拍摄设备的移动终端处理器。
61.需要说明的是,医学检测标准可以为按照医师的要求作出的动作,比如:跑步、拿起物体等动作。
62.为了使采集患者的图像更准确,在一个可选的实施例中,步骤s11中获取终端设备采集的运动视频包括:获取终端设备的深度相机采集的运动视频。
63.本技术可以采用深度相机对人体运动视频进行采集,由于深度相机可以具有准确地知道图像中每个点与摄像头的距离,然后再加上对应点在2d图像中的(x,y)的坐标,就可以获取到对应点的三维坐标,使得图像中各个点对应的人体部位更准确,从而可以提高计算的准确度。
64.需要说明的是,深度相机可以为结构光深度相机、双目视觉深度相机以及光飞行时间法深度相机。
65.为了捕捉肢体运动图像中的骨架信息,在一个可选的实施例中,执行步骤s13。
66.步骤s13:基于骨架捕捉方法对肢体运动图像中的骨架信息进行捕捉;其中,骨架信息包括多个骨架节点的三维坐标。
67.具体的,在本技术中,结合图2所示,在云端服务器获取到人体运动rgb图像之后,云端服务器可以根据骨架捕捉方法对人体图像中的骨架捕捉信息进行捕捉,以得到人体骨架的多个关节点信息。其中,骨架捕捉方法可以由集成于云端服务器的骨架检测模块实现。
68.需要说明的是,骨架捕捉方法可以为在得到人体图像之后,将人体图像通过已经训练好的神经网络进行识别,以得到人体骨架的多个关节点信息。
69.为了使关节点信息确定地更精准,在一个可选的实施例中,骨架捕捉方法为openpose的骨架捕捉方法,步骤s13中基于骨架捕捉方法对肢体运动图像中的骨架信息进行捕捉包括:
70.获取第一神经网络模型。
71.基于第一神经网络模型对肢体运动图像中的骨架信息进行捕捉。
72.骨架捕捉方法可以为openpose的骨架捕捉方法。云端服务器可以获取到第一神经网络模型。其中,将采集到的图片放入第一神经网络模型中,对不同分类(比如:左腰、右腰、左肩等)下的人物的姿态信息进行提取,并提取其关节点的三维坐标数据,最终确定肢体运动图像中的骨架信息即多个关节点信息。需要说明的是,openpose的骨架捕捉方法可以为依赖于卷积神经网络和监督学习实现人体姿态评估算法,其主要的优点在于适用于多人三维,且较为精准和迅速的识别开源模型。故,能够准确地确定关节点信息。
73.为了检测患者的运动完成情况,在一个可选的实施例中,故需执行步骤s15。
74.步骤s15:基于目标检测算法对骨架节点的三维坐标进行检测,生成第一检测结果。
75.结合表1所示,表1为各个身体部位做出对应动作的完成情况,以及对应的评分。具体的,在本技术中,在云端服务器识别到骨架节点的三维坐标之后,可以采用目标检测算法检测各个关节点是否能够达到预期的效果(比如:肱二头肌腱反射是否能够引出反射活动),需要说明的是,目标检测算法可以为将上述已经获取到的骨架信息与神经网络进行比
对,以检测患者完成的质量(比如:肱二头肌腱反射是否能够引出反射活动,可以引出反射活动给2分,不能引出反射活动给0分)。
76.需要说明的是,目标检测算法可以为dpm(deformable parts models)的目标检测算法,也可以为yolox的目标检测算法,具体的目标检测算法在此不做限定,可以本领域技术人员实现为准。
77.表1
78.79.80.81.82.[0083][0084]
为了检测手部运动图像,在一个可选的实施例中,肢体运动图像包括手部运动图像,方法还包括:
[0085]
基于目标检测算法对手部运动图像进行检测,生成第二检测结果;其中,手部运动图像包括手抓物体时的运动状态。
[0086]
结合图3所示,图3为手部完成情况对应的评分,对于手部运动检测,量表中分为三级:0分:无法拿起物体;1分:能够拿起物体,无法抵抗阻力;2分:能够拿起物体,并抵抗一定阻力。如果患者能够抵抗该阻力,判定为2分,如果无法抵抗,判定为1分。肢体运动图像还包括手部运动图像。其中,手部运动图像包括手抓物体时的运动状态,比如:手握住铅笔,再比如:两个或两个以上的手指抓住圆桶物体等。云端服务器可以根据目标检测算法对手部运动图像进行检测,生成第二检测结果。即与训练好的神经网络模型进行比对,生成第二检测结果。
[0087]
需要说明的是,手部运动图像还可以包括手的运动图像。比如:手指共同伸展,再比如:手指共同弯曲等手部运动。
[0088]
为了使第二检测结果更准确,在一个可选的实施例中,基于目标检测算法对手部运动图像进行检测,生成第二检测结果,包括:
[0089]
基于目标检测算法获取物体的重力。
[0090]
基于目标检测算法识别物体的种类。
[0091]
基于目标检测算法对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
[0092]
云端服务器可以将手部运动图像通过训练好的神经网络模型,获取物体的重力,需要说明的是,物体的重力可以替代上述图3中的阻力。可以识别物体的种类(比如:苹果、水杯等)。在得到物体的重力、物体的种类以及手抓物体时的运动状态之后,再与已经训练好的神经网络模型进行比对,生成第二检测结果。通过这样的方式,能够更准确地得到第二检测结果。
[0093]
为了更准确地确定物体的重力,在一个可选的实施例中,基于目标检测算法获取物体的重力,包括:
[0094]
基于目标检测算法识别物体的颜色。
[0095]
获取物体的颜色与物体的重力之间的预设映射关系。
[0096]
基于预设映射关系以及物体的颜色确定物体的重力。
[0097]
结合图4所示,左侧和右侧的物体颜色不同,云端服务器可以根据目标检测算法识别物体的颜色,需要说明的是,本技术可以采用至少两种颜色的物体。云端服务器获取到物体的颜色与物体的重力之间的预设映射关系,再根据预设映射关系和已经确定的颜色确定物体的重力。即本技术采用不同颜色以更准确地确定物体的重力。
[0098]
需要说明的是,预设映射关系可以为物体的颜色对应物体的重力数值,比如:黄色可以为7n的重力,蓝色可以为15n的重力。
[0099]
在一个可选的实施例中,在上述重力不满足要求的情况下,可以向物体内加入其它物体(比如:沙子、液体等)以使重力满足要求。比如:当前需要的重力为19n,然而当前物体的重力仅仅达到了15n,那么可以向物体加入5n的沙子,以达到19n重力。
[0100]
为了使检测结果更准确,在一个可选的实施例中,目标检测算法为yolox目标检测算法,步骤s15中基于目标检测算法对骨架节点的三维坐标进行检测,生成第一检测结果包括:获取第二神经网络模型;
[0101]
基于第二神经网络模型对骨架节点的三维坐标进行检测,生成第一检测结果。
[0102]
基于目标检测算法获取物体的重力,包括
[0103]
基于第二神经网络模型获取物体的重力。
[0104]
基于目标检测算法识别物体的种类,包括:
[0105]
基于第二神经网络模型识别物体的种类。
[0106]
基于目标检测算法对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果,包括:
[0107]
基于第二神经网络模型对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
[0108]
具体的,目标检测算法为yolox的目标检测算法,由于其具有简单直接、在图像上运行单个卷积网络以及由模型的置信度对得到的检测结果进行处理的特点,使得流程简单、速度快、错误率低。本技术可以将yolox的目标检测算法集成于云端服务器,即云端服务器可以利用yolox的目标检测算法对肢体运动图像和手部运动图像进行检测。其中,云端服务器可以获取到第二神经网络模型,根据第二神经网络模型对骨架节点的三维坐标进行检
测,生成第一检测结果;根据第二神经网络模型对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
[0109]
在一个可选的实施例中,云端服务器可以将第一检测结果和第二检测结果生成评分报告,然后发送至终端设备。也可以将第一检测结果和第二检测结果分别发送至终端设备。结合图5所示,图5为现有技术提供的展示界面,其中,该界面可以包括:关节活动度、体姿、功能性、平衡、kams、过顶深蹲、墙壁天使、反向弓箭步以及纵跳。
[0110]
需要说明的是,墙壁天使可以为纠正体态的一个动作,kams可以为功能动作筛查。
[0111]
本技术与现有技术相比,通过云端服务器与终端设备之间的数据互通,即将终端设备采集的图像发送至云端服务器,云端服务器根据图像通过骨架捕捉方法对骨架进行捕捉以及通过目标检测算法进行检测,生成检测结果,能够智能地检测患者完成动作的情况,从而使得检测结果更准确。
[0112]
此外,利用物体的颜色以及预设的映射关系得到物体的重力,能够实现非接触式的物体质量的确定。
[0113]
如图6所示,在一个可选的实施例中,本技术还提供了一种检测结果的生成装置,该装置包括:获取模块61,用于获取终端设备采集的运动视频;其中,运动视频包括肢体运动图像;捕捉模块62,用于基于骨架捕捉方法对肢体运动图像中的骨架信息进行捕捉;其中,骨架信息包括多个骨架节点的三维坐标;第一生成模块63,用于基于目标检测算法对骨架节点的三维坐标进行检测,生成第一检测结果。
[0114]
具体的,在本技术中,可以由云端服务器作为本技术的执行主体。其中,云端服务器可以和终端设备建立通信关系,终端设备可以通过终端设备自带的摄像头对患者进行摄像,即将患者按照医学检测标准做出相应的动作进行采集,然后可以将实时的rgb图像上传至云端服务器,其中,运动视频包括肢体运动图像。其中,在云端服务器获取到人体运动rgb图像之后,云端服务器可以根据骨架捕捉方法对人体图像中的骨架捕捉信息进行捕捉,以得到人体骨架的多个关节点信息。其中,骨架捕捉方法可以由集成于云端服务器的骨架检测模块实现。需要说明的是,骨架捕捉方法可以为在得到人体图像之后,将人体图像通过已经训练好的神经网络进行识别,以得到人体骨架的多个关节点信息。其中,在云端服务器识别到骨架节点的三维坐标之后,可以采用目标检测算法检测各个关节点是否能够达到预期的效果(比如:肱二头肌腱反射是否能够引出反射活动),需要说明的是,目标检测算法可以为将上述已经获取到的骨架信息与神经网络进行比对,以检测患者完成的质量(比如:肱二头肌腱反射是否能够引出反射活动,可以引出反射活动给2分,不能引出反射活动给0分)。其中,
[0115]
可选的,捕捉模块62,用于获取第一神经网络模型;基于第一神经网络模型对肢体运动图像中的骨架信息进行捕捉;其中,骨架捕捉方法为openpose的骨架捕捉方法。
[0116]
骨架捕捉方法可以为openpose的骨架捕捉方法。其中,openpose的骨架捕捉方法可以包括第一神经网络模型,即将采集到的图片放入第一神经网络模型中,对不同分类(比如:左腰、右腰、左肩等)下的人物的姿态信息进行提取,并提取其关节点的三维坐标数据,最终确定肢体运动图像中的骨架信息即多个关节点信息。需要说明的是,openpose的骨架捕捉方法可以为依赖于卷积神经网络和监督学习实现人体姿态评估算法,其主要的优点在于适用于多人三维,且较为精准和迅速的识别开源模型。故,能够准确地确定关节点信息。
[0117]
可选的,装置还包括:第二生成模块,用于基于目标检测算法对手部运动图像进行检测,生成第二检测结果;其中,手部运动图像包括手抓物体时的运动状态,肢体运动图像包括手部运动图像。
[0118]
肢体运动图像还包括手部运动图像。其中,手部运动图像包括手抓物体时的运动状态,比如:手握住铅笔,再比如:两个或两个以上的手指抓住圆桶物体等。云端服务器可以根据目标检测算法对手部运动图像进行检测,生成第二检测结果。即与训练好的神经网络模型进行比对,生成第二检测结果。需要说明的是,手部运动图像还可以包括手的运动图像。比如:手指共同伸展,再比如:手指共同弯曲等手部运动。
[0119]
可选的,第二生成模块,用于基于目标检测算法获取物体的重力;基于目标检测算法识别物体的种类;基于目标检测算法对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
[0120]
云端服务器可以将手部运动图像通过训练好的神经网络模型,获取物体的重力,需要说明的是,物体的重力可以替代上述图3中的阻力。可以识别物体的种类(比如:苹果、水杯等)。在得到物体的重力、物体的种类以及手抓物体时的运动状态之后,再与已经训练好的神经网络模型进行比对,生成第二检测结果。通过这样的方式,能够更准确地得到第二检测结果。
[0121]
可选的,第二生成模块,用于基于目标检测算法识别物体的颜色;获取物体的颜色与物体的重力之间的预设映射关系;基于预设映射关系以及物体的颜色确定物体的重力。
[0122]
云端服务器可以根据目标检测算法识别物体的颜色,需要说明的是,本技术可以采用至少两种颜色。云端服务器获取到物体的颜色与物体的重力之间的预设映射关系,再根据预设映射关系和已经确定的颜色确定物体的重力。即本技术采用不同颜色以更准确地确定物体的重力。
[0123]
可选的,目标检测算法为yolox目标检测算法,第一生成模块63,用于获取第二神经网络模型;基于第二神经网络模型对骨架节点的三维坐标进行检测,生成第一检测结果;第二生成模块,用于基于第二神经网络模型获取物体的重力,基于第二神经网络模型识别物体的种类,基于第二神经网络模型对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
[0124]
目标检测算法为yolox的目标检测算法,由于其具有简单直接、在图像上运行单个卷积网络以及由模型的置信度对得到的检测结果进行处理的特点,使得流程简单、速度快、错误率低。本技术可以将yolox的目标检测算法集成于云端服务器,即云端服务器可以利用yolox的目标检测算法对肢体运动图像和手部运动图像进行检测。其中,云端服务器可以获取到第二神经网络模型,根据第二神经网络模型对骨架节点的三维坐标进行检测,生成第一检测结果;根据第二神经网络模型对物体的重力、物体的种类以及手抓物体时的运动状态进行检测,生成第二检测结果。
[0125]
可选的,获取模块,用于获取终端设备的深度相机采集的运动视频。
[0126]
本技术可以采用深度相机对人体运动视频进行采集,由于深度相机可以具有准确地知道图像中每个点与摄像头的距离,然后再加上对应点在2d图像中的(x,y)的坐标,就可以获取到对应点的三维坐标,使得图像中各个点对应的人体部位更准确,从而可以提高计算的准确度。
[0127]
本技术与现有技术相比,通过云端服务器与终端设备之间的数据互通,即将终端设备采集的图像发送至云端服务器,云端服务器根据图像通过骨架捕捉方法对骨架进行捕捉以及通过目标检测算法进行检测,生成检测结果,能够智能地检测患者完成动作的情况,从而使得检测结果更准确。
[0128]
此外,利用物体的颜色以及预设的映射关系得到物体的重力,能够实现非接触式的物体质量的确定。
[0129]
应理解,本文中前述关于本技术的方法所描述的具体特征、服务和细节也可类似地应用于本技术的装置和系统,或者,反之亦然。另外,上文描述的本技术的方法的每个步骤可由本技术的装置或系统的相应部件或单元执行。
[0130]
应理解,本技术的装置的各个模块/单元可全部或部分地通过软件、硬件、固件或其组合来实现。各模块/单元各自可以硬件或固件形式内嵌于计算机设备的处理器中或独立于处理器,也可以软件形式存储于计算机设备的存储器中以供处理器调用来执行各模块/单元的服务。各模块/单元各自可以实现为独立的部件或模块,或者两个或更多个模块/单元可实现为单个部件或模块。
[0131]
在一个实施例中,提供了一种计算机设备,其包括存储器和处理器,存储器上存储有可由处理器执行的计算机指令,计算机指令在由处理器执行时指示处理器执行本技术的方法的各步骤。该计算机设备可以广义地为服务器、终端,或任何其他具有必要的计算和/或处理能力的电子设备。在一个实施例中,该计算机设备可包括通过系统总线连接的处理器、存储器、网络接口、通信接口等。该计算机设备的处理器可用于提供必要的计算、处理和/或控制能力。该计算机设备的存储器可包括非易失性存储介质和内存储器。该非易失性存储介质中或上可存储有服务系统、计算机程序等。该内存储器可为非易失性存储介质中的服务系统和计算机程序的运行提供环境。该计算机设备的网络接口和通信接口可用于与外部的设备通过网络连接和通信。
[0132]
本技术可以实现为一种计算机可读存储介质,其上存储有计算机程序,计算机程序在由处理器执行时导致本技术的方法的步骤被执行。在一个实施例中,计算机程序被分布在网络耦合的多个计算机设备或处理器上,以使得计算机程序由一个或多个计算机设备或处理器以分布式方式存储、访问和执行。单个方法步骤/服务,或者两个或更多个方法步骤/服务,可以由单个计算机设备或处理器或由两个或更多个计算机设备或处理器执行。一个或多个方法步骤/服务可以由一个或多个计算机设备或处理器执行,并且一个或多个其他方法步骤/服务可以由一个或多个其他计算机设备或处理器执行。一个或多个计算机设备或处理器可以执行单个方法步骤/服务,或执行两个或更多个方法步骤/服务。
[0133]
本领域普通技术人员可以理解,本技术方法的步骤可以通过计算机程序来指示相关的硬件如计算机设备或处理器完成,上述的计算机程序可存储于非暂时性计算机可读存储介质中,该计算机程序被执行时导致本技术的方法的步骤被执行。根据情况,本文中对存储器、存储、数据库或其它介质的任何引用可包括非易失性和/或易失性存储器。非易失性存储器的示例包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)、闪存、磁带、软盘、磁光数据存储装置、光学数据存储装置、硬盘、固态盘等。易失性存储器的示例包括随机存取存储器(ram)、外部高速缓冲存储器等。
[0134]
以上描述的各技术特征可以任意地组合。尽管未对这些技术特征的所有可能组合
进行描述,但这些技术特征的任何组合都应当被认为由本说明书涵盖,只要这样的组合不存在矛盾。
[0135]
尽管结合实施例对本技术进行了描述,但本领域技术人员应理解,上文的描述和附图仅是示例性而非限制性的,本技术不限于所公开的实施例。在不偏离本技术的精神的情况下,各种改型和变体是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1