一种目标检测方法及摄像机与流程
本申请涉及图像处理,尤其是涉及一种目标检测方法及摄像机。
背景技术:
1、目标检测也称为目标提取,是一种基于目标对象的几何特征和统计特征的图像分割技术,能够将目标对象的分割和识别合二为一,准确性和实时性是系统的重要能力。随着计算机技术的发展和计算机视觉原理的广泛应用,利用图像处理技术对目标对象进行实时检测的方式越来越多,对目标对象进行实时检测的方式,在智能化交通系统、智能管理系统等方面具有广泛的应用价值。
2、为了实现目标检测,通常需要在目标场景(即需要对目标对象进行检测的应用场景)部署摄像机,需要通过摄像机采集目标场景的图像,利用图像处理技术,可以基于图像分析出目标对象的实时位置,继而对目标对象进行管理。
3、但是,由于摄像机的视野范围有限,当目标对象超出摄像机的视野范围时,摄像机就无法采集目标对象的图像,导致无法分析出目标对象的实时位置。
技术实现思路
1、本申请提供一种目标检测方法,应用于实现目标检测盲区全覆盖的摄像机,所述摄像机包括长焦传感器和鱼眼传感器,所述方法包括:
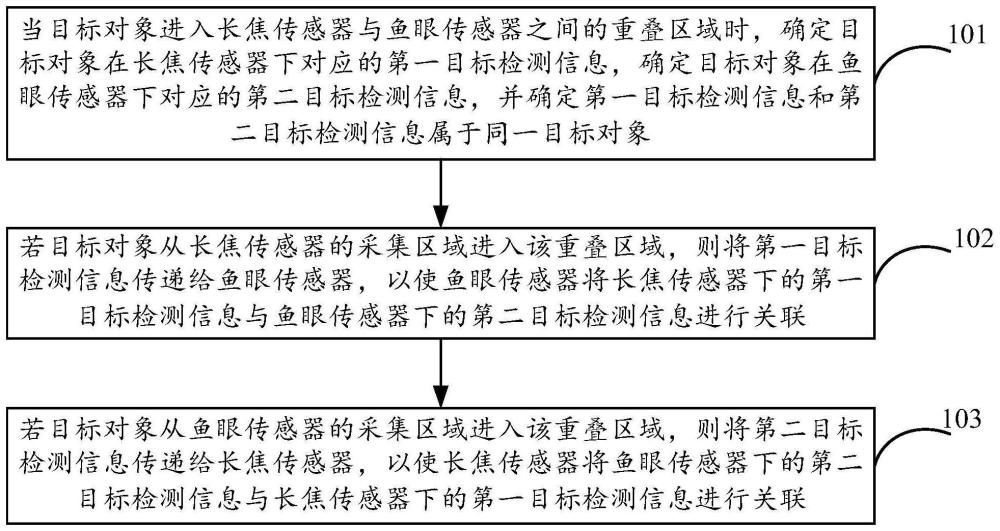
2、当目标对象进入所述长焦传感器与所述鱼眼传感器之间的重叠区域时,确定所述目标对象在所述长焦传感器下对应的第一目标检测信息,确定所述目标对象在所述鱼眼传感器下对应的第二目标检测信息,并确定所述第一目标检测信息和所述第二目标检测信息属于同一所述目标对象;
3、若所述目标对象从所述长焦传感器的采集区域进入所述重叠区域,则将所述第一目标检测信息传递给所述鱼眼传感器,以使所述鱼眼传感器将所述第一目标检测信息与所述鱼眼传感器下的第二目标检测信息进行关联;
4、若所述目标对象从所述鱼眼传感器的采集区域进入所述重叠区域,则将所述第二目标检测信息传递给所述长焦传感器,以使所述长焦传感器将所述第二目标检测信息与所述长焦传感器下的第一目标检测信息进行关联。
5、本申请提供一种摄像机,所述摄像机用于实现目标检测盲区全覆盖,所述摄像机包括长焦传感器、鱼眼传感器和处理器;其中:
6、所述长焦传感器,用于采集长焦图像,将所述长焦图像发送给处理器;
7、所述鱼眼传感器,用于采集鱼眼图像,将所述鱼眼图像发送给处理器;
8、基于所述长焦图像和所述鱼眼图像,所述处理器用于执行:
9、当目标对象进入所述长焦传感器与所述鱼眼传感器之间的重叠区域时,基于所述长焦图像确定所述目标对象在所述长焦传感器下对应的第一目标检测信息,基于所述鱼眼图像确定所述目标对象在所述鱼眼传感器下对应的第二目标检测信息,并确定所述第一目标检测信息和所述第二目标检测信息属于同一所述目标对象;若所述目标对象从所述长焦传感器的采集区域进入所述重叠区域,则将所述第一目标检测信息传递给所述鱼眼传感器,以使所述鱼眼传感器将所述第一目标检测信息与所述鱼眼传感器下的第二目标检测信息进行关联;若所述目标对象从所述鱼眼传感器的采集区域进入所述重叠区域,则将所述第二目标检测信息传递给所述长焦传感器,以使所述长焦传感器将所述第二目标检测信息与所述长焦传感器下的第一目标检测信息进行关联。
10、由以上技术方案可见,本申请实施例中,摄像机可以包括长焦传感器和鱼眼传感器,通过长焦传感器和鱼眼传感器可以增加摄像机的视野范围,使得摄像机能够采集较大视野范围内的图像,实现目标检测盲区的全覆盖,即实现无盲区的全场景目标检测,避免目标对象处于某些位置时无法得到目标对象的实时位置的情况。当目标对象进入长焦传感器与鱼眼传感器之间的重叠区域时,还可以将目标对象在长焦传感器下对应的目标检测信息与目标对象在鱼眼传感器下对应的目标检测信息进行关联,实现目标对象移动情况下的实施检测。
技术特征:
1.一种目标检测方法,其特征在于,应用于实现目标检测盲区全覆盖的摄像机,所述摄像机包括长焦传感器和鱼眼传感器,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述第一目标检测信息包括所述目标对象在所述长焦传感器下对应的第一位置,所述第二目标检测信息包括所述目标对象在所述鱼眼传感器下对应的第二位置,所述确定所述第一目标检测信息和所述第二目标检测信息属于同一所述目标对象,包括:
3.根据权利要求2所述的方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述鱼眼图像确定所述目标对象在所述鱼眼传感器下对应的第二位置,包括:
5.根据权利要求4所述的方法,其特征在于,
6.根据权利要求5所述的方法,其特征在于,
7.根据权利要求1所述的方法,其特征在于,若所述目标对象进入所述鱼眼传感器的采集区域,则通过所述鱼眼传感器采集鱼眼图像,基于所述鱼眼图像确定所述目标对象在所述鱼眼传感器下对应的第三位置;所述基于所述鱼眼图像确定所述目标对象在所述鱼眼传感器下对应的第三位置,包括:
8.根据权利要求7所述的方法,其特征在于,
9.根据权利要求8所述的方法,其特征在于,
10.一种摄像机,其特征在于,所述摄像机用于实现目标检测盲区全覆盖,所述摄像机包括长焦传感器、鱼眼传感器和处理器;其中:
技术总结
本申请提供一种目标检测方法及摄像机,该方法包括:当目标对象进入长焦传感器与鱼眼传感器之间的重叠区域时,确定目标对象在长焦传感器下对应的第一目标检测信息,确定目标对象在鱼眼传感器下对应的第二目标检测信息,确定第一目标检测信息和第二目标检测信息属于同一目标对象;若目标对象从长焦传感器的采集区域进入重叠区域,将第一目标检测信息传递给鱼眼传感器,由鱼眼传感器将第一目标检测信息与第二目标检测信息进行关联;若目标对象从鱼眼传感器的采集区域进入重叠区域,则将第二目标检测信息传递给长焦传感器,由长焦传感器将第二目标检测信息与第一目标检测信息进行关联。通过本申请技术方案,实现目标检测盲区的全覆盖,得到实时位置。
技术研发人员:房世光,沈玉姣,申力强,田仁富
受保护的技术使用者:杭州海康威视数字技术股份有限公司
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!