一种基于分布式光纤传感的步态识别方法和装置与流程
1.本发明涉及步态识别技术领域,特别涉及一种基于分布式光纤传感的步态识别方法和装置。
背景技术:
2.分布式光纤在各种领域应用广泛,尤其是在油气管网安全性监测、边境安防管理起到了显著的作用,且人员步态具有不一致性,通过步态能验证生物特征,认知负荷下的步态由于处理认知信息的成本的个体差异而具有唯一的特征,通过分布式光纤获取人员步态能判断人员身份。
3.现有技术中,忽视事件的差异性,对识别对象缺少进一步分析,没有对引起事件的人的行为特征进行分析,研究缺少对事件的细粒度分析,不能应用分布式光纤通过步态来识别人员身份,只能识别到相关事件是由人引起的。
4.例如,一种在中国专利文献上公开的“分布式光纤传感装置”,其公告号:cn111089613a,其申请日:2019年12月30日,该发明提升了有效检测距离且测量时间更短,但是存在不能通过分布式光纤获取步态,不能通过步态来识别人员身份的问题。
技术实现要素:
5.针对现有技术不能通过分布式光纤获取步态,不能通过步态来识别人员身份的不足,本发明提出了一种基于分布式光纤传感的步态识别方法和装置,能通过分布式光纤获取步态,能通过步态来识别人员身份。
6.以下是本发明的技术方案,一种基于分布式光纤传感的步态识别方法,包括以下步骤:
7.s1:采集模块采集步态信号;
8.s2:分析模块将步态信号分隔成单状态和双状态;
9.s3:建立单状态和双状态集成学习模型,以提取的步态信号特征作为集成学习模型输入进行训练,得到预测值;
10.s4:处理模块基于预测值判定人员身份并进行处理。
11.本方案中,利用采集模块采集需要识别人员的步态信号,对由人走动引起的波形信号进行分析;分析模块分析人员的步态信号特征,将步态分为单状态部分和双状态部分;建立单状态和双状态集成学习模型,提取出单状态和双状态的特征,将这些特征输入到集成学习模型中进行训练,训练完的集成学习模型输出预测值;处理模块基于预测值判定人员身份并进行处理。
12.作为优选,集成学习模型由单状态特征蒸馏模块、双状态特征蒸馏模块、特征判别模块和融合模块组成,单状态特征蒸馏模块和双状态特征蒸馏模块用于提取时序高级特征,特征判别模块将单状态特征向量和双状态特征向量组合作为集成学习模型的输入并得到概率值,融合模块接收单状态特征蒸馏模块、双状态特征蒸馏模块和特征判别模块的输
出并通过多层神经网络进行特征融合。
13.作为优选,按照接触面脚的数量和状态将步态周期划分为若干个步态事件。
14.本方案中,按照接触面脚的数量和状态将步态周期划分为若干个步态事件,对步态事件进行划分,确定单状态和双状态的临界点,保证单状态和双状态划分的准确性。
15.作为优选,步态事件分为单支撑过程状态和双支撑过程状态,单支撑过程状态占步态周期的首部9%和尾部7%,其余部分为双支撑过程状态。
16.本方案中,步态事件分为单支撑过程状态和双支撑过程状态,单支撑过程状态占步态周期的首部9%和尾部7%,其余部分为双支撑过程状态,通过大数据获取数据并进行步态识别,分析步态事件归类和比例,便于对采集的步态信号进行单状态和双状态的划分。
17.作为优选,集成学习模型采用残差连接和正则化技术,神经网络最后一层采用sigmoid激活函数。
18.本方案中,采用了残差连接和正则化技术提升模型表征能力,最后一层神经网络采用 sigmoid激活函数,保证输出的预测值分布在0至1之间。
19.作为优选,采集模块采集频率为5赫兹。
20.本方案中,采集模块采集频率为5赫兹,保证步态图像的连贯性且不会丢失步态特征。
21.作为优选,s4具体步骤如下:
22.s41:基于预测值判断人员是否为陌生人;
23.s42:若是陌生人,预警并录入身份,若不是陌生人,通过步态信号识别人员身份。
24.本方案中,处理模块基于预测值判定人员身份并进行处理,若是陌生人,预警并录入身份,若不是陌生人,通过步态信号识别人员身份,对陌生人进行预警,保证安防人员第一时间发现该陌生人,要求陌生人录入身份,便于记录陌生人信息,识别不是陌生人人员的身份,便于归纳统计。
25.作为优选,s42还包括:
26.若录入了身份,则将身份与对应的步态信号进行匹配。
27.本方案中,录入身份后将身份与对应的步态信号进行匹配,用于保证下次识别时不是陌生人。
28.一种基于分布式光纤传感的步态识别装置,包括:采集模块、分析模块和处理模块,采集模块包括:激光器,用于产生激光,连接声光调制器;
29.声光调制器,用于将激光器的连续光变为脉冲光,连接光纤放大器;
30.光纤放大器,用于放大声光调制器的脉冲光信号,连接环形器;
31.环形器,用于输送脉冲光信号至光纤传感器,输出瑞利后向散射光至光电探测器,连接光纤传感器和光电探测器;
32.光纤传感器,用于监测被测场的空间分布和随时间的变化信息;
33.光电探测器,用于将环形器的光信号转化为电信号,连接数据采集卡;
34.数据采集卡,采集光电探测器的电信号并传输至分析模块;
35.分析模块,用于处理和分析步态信号并将分析结果输出至处理模块;
36.处理模块,用于基于分析结果进行事务处理。
37.本方案中,采集模块采集需要识别人员的步态信号,对由人走动引起的波形信号
进行分析,分析模块对信号进行处理,并将分析结果输出至处理模块,分析模块分析人员的步态信号特征,将步态分为单状态部分和双状态部分,建立单状态和双状态集成学习模型,提取出单状态和双状态的特征,将这些特征输入到集成学习模型中进行训练,训练完的集成学习模型输出预测值,处理模块基于分析模块的分析结果进行处理。
38.作为优选,光纤传感器为分布式光纤传感器,激光器为窄线宽激光器,光纤传感器沿着油气管网进行铺设,激光器、声光调制器、光纤放大器、环形器、光电探测器和数据采集卡集成在机箱里。
39.本方案中,分布式光纤传感采用分布式光纤探测技术,对沿光纤传输路径上的空间分布和随时间变化信息进行测量或监控,光纤传感器沿着油气管网进行铺设,把每个传感单位设置成一个防区,采集模块的其他部分集成在机箱里,保证传感器防区的严密性的同时减小装置的复杂度。
40.本发明的有益效果是:能通过分布式光纤获取步态,能通过步态来识别人员身份。
附图说明
41.图1本发明一种基于分布式光纤传感的步态识别装置的结构示意图。
42.图2本发明一种基于分布式光纤传感的步态识别方法的流程图。
43.图3本发明一种基于分布式光纤传感的步态识别方法的步态周期波形图。
44.图中1、激光器;2、声光调制器;3、光纤放大器;4、环形器;5、光纤传感器;6、光电探测器;7、数据采集卡;8、分析模块;9、处理模块;10、采集模块。
具体实施方式
45.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
46.实施例:如图1所示,一种基于分布式光纤传感的步态识别装置,包括:采集模块10、分析模块8和处理模块9,采集模块10包括光纤传感器5、激光器1、声光调制器2、光纤放大器3、环形器4、光电探测器6和数据采集卡7,其中,光纤传感器5,激光器1连接声光调制器2,声光调制器2连接光纤放大器3,光纤放大器3连接环形器4,环形器4连接光纤传感器5和光电探测器6,光电探测器6连接数据采集卡7。
47.光纤传感器5为分布式光纤传感器,分布式光纤传感采用独特的分布式光纤探测技术,对沿光纤传输路径上的空间分布和随时间变化信息进行测量或监控,它将传感光纤沿场排布,可以同时获得被测场的空间分布和随时间的变化信息,光纤传感器5沿着油气管网进行铺设,把每个传感单位设置成一个防区,采集模块10的其他部分集成在机箱里。激光器1为窄线宽激光器1,激光器1的激光经过声光调制器2处理由连续光变为脉冲光,通过光纤放大器3 放大脉冲光信号,后经过环形器4输送到光纤传感器5中。当光纤传感器5受到扰动时,由于弹性光学效应,被扰动位置的光相位会发生变化,导致相应位置的背向散射光相位发生变化,散射光的干涉光强内脉宽也会相应改变。光电探测器6接收环形器4另一端输出的瑞利后向散射光,通过数据采集卡7传输到分析模块8。利用采集模块10采集需要识别人员的步态信号,对由人走动引起的波形信号进行分析。
48.分析模块8对信号进行处理,并将分析结果输出至处理模块9。分析模块8分析人员的步态信号特征,将步态分为单状态部分和双状态部分;建立单状态和双状态集成学习模
型,提取出单状态和双状态的特征,将这些特征输入到集成学习模型中进行训练,训练完的集成学习模型输出预测值。
49.处理模块9基于分析模块8的分析结果进行处理。基于预测值判断人员是否为陌生人,若是陌生人,呼叫安保并录入身份信息,若录入了身份信息,则将身份信息与对应的步态信号进行匹配,用于下一次识别;若不是陌生人,通过步态信号识别出人员身份。
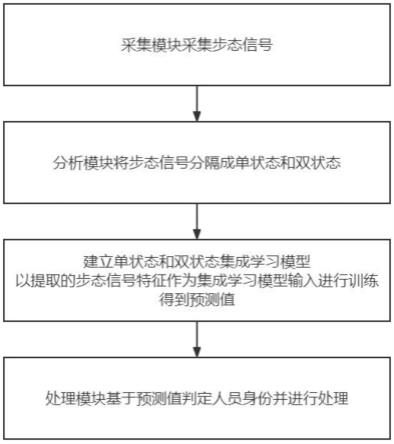
50.如图2所示,一种基于分布式光纤传感的步态识别方法,包括以下步骤:
51.s1:采集模块采集步态信号。
52.s2:分析模块将步态信号分隔成单状态和双状态。
53.s3:建立单状态和双状态集成学习模型,以提取的步态信号特征作为集成学习模型输入进行训练,得到预测值。
54.s4:处理模块基于预测值判定人员身份并进行处理。
55.s1:采集模块采集步态信号。
56.具体的,通过采集模块采集步态信号,人类的步态具有不一致性,通过步态能验证生物特征,认知负荷下的步态由于处理认知信息的成本的个体差异而具有唯一的特征,利用分布式光纤传感器记录步态信号。步态信号与人员身份进行匹配,匹配方式为人工匹配。采集模块采集频率为5赫兹,保证步态图像的连贯性且不会丢失步态特征。
57.s2:分析模块将步态信号分隔成单状态和双状态;
58.步态信号由采集模块进行记录,利用集成学习对步态进行分类,集成学习方法用于将实现的分类与输入数据相关联。分析模块对采集模块收集到的步态信号进行分析。通过大数据获取数据并进行步态识别,分析步态事件归类和比例,便于对采集的步态信号进行单状态和双状态的划分,如图3所示,地面反作用力的细节遵循步态周期,因此,基于接触面脚的数量和状态划分了十五种步态事件。步态周期的步态事件顺序包括:脚跟打击、脚压扁、单支撑、对脚跟打击、对脚压扁、双支撑、脚趾离地、脚摆动、脚跟打击、双支撑、脚趾离地、脚摆动、对脚跟打击、单支撑、脚趾离地。将十五种步态事件分在abcdefg七个区域。将ab 状态记为单支撑过程状态(简称单状态),cdef记为双支撑过程状态(简称双状态)。不同人的单双状态波形有显著差异。单状态占一个步态周期信号首部9%,尾部7%,其余部分为双状态。采集待识别人员的步态信号,将信号按着时间占比分割。
59.s3:建立单状态和双状态集成学习模型,以提取的步态信号特征作为集成学习模型输入进行训练,得到预测值。
60.具体的,对步态信号进行特征提取,提取的特征输入模型训练,获得高识别率的模型。为了抑制噪声干扰,有效地融合两种状态信息,建立单状态和双状态集成学习模型。集成学习模型由四部分组成,即单状态特征蒸馏模块、双状态特征蒸馏模块、特征判别模块和融合模块。
61.集成学习模型的输入为单状态特征向量和双状态特征向量,特征向量通过计算窗口波形特征值并组合获得,表1展示了特征向量详细信息。
62.表1特征向量详细信息表。
[0063][0064][0065]
单状态特征蒸馏模块和双状态特征蒸馏模块用来提取时序高级特征,特征判别模块将单状态特征向量和双状态特征向量组合作为输入,经过n个梯度提升模型(extreme gradientboosting,xgboost)分别得到概率值,特征判别模块引入了预测多样性,进一步降低了随机噪声的干扰,可以显著提升最终的判别精度,本文取n=10。融合模块接收单状态特征蒸馏模块、双状态特征蒸馏模块和特征判别模块的输出并通过多层神经网络进行特征融合,还采用了残差连接和正则化技术提升模型表征能力,最后一层神经网络采用sigmoid激活函数,保证输出的预测概率值分布在0至1之间。
[0066]
s4:处理模块基于预测值判定人员身份并进行处理。
[0067]
具体的,处理模块基于预测值判定人员身份并进行处理,基于预测值判断人员是否为陌生人,若是陌生人,呼叫安保或录入身份,若录入了身份,则将身份与对应的步态信号进行匹配,用于下一次识别;若不是陌生人,通过步态信号识别出人员身份。
[0068]
利用采集模块采集需要识别人员的步态信号,对由人走动引起的波形信号进行分析;分析模块分析人员的步态信号特征,将步态分为单状态部分和双状态部分;建立单状态和双状态集成学习模型,提取出单状态和双状态的特征,将这些特征输入到集成学习模型中进行训练,训练完的集成学习模型输出预测值;处理模块基于预测值判定人员身份并进行处理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1