目标定位方法、装置、移动终端及存储介质与流程
本发明涉及机器学习,尤其涉及一种目标定位方法、装置、移动终端及存储介质。
背景技术:
1、随着城市智慧化、数字化的推进,智能交通已成为智慧城市中必不可少的一个环节,智能交通的发展,不仅节省了交通监管和查控所需投入的人力,解决恶劣交通环境下监管的困难,更加全面和及时地检测交通事件的发生,为人们出行带来极大便利。道路交通的行人、车辆和非机动车检测,可以帮助提高交通监管的效率,减轻交通拥堵的现象,减少交通事故发生的概率,减少刑事侦查所需的人力。
2、道路交通中,检测的目标通常包括人脸和车牌,在人脸和车牌等小目标的检测过程中,核心算法为定位算法,定位算法是一种像素匹配算法,是通过一定的运算在图像里面找出人脸和车牌所在的区域,然后返回这个矩形框的坐标,也即通过定位可以在图像中找出人脸和车牌,后续可以将这些信息提供给其它应用做深入处理。
3、目前,对图像进行处理实现目标定位的主流定位技术包括如下两种:
4、(1)基于图像像素形状特征的定位,其优点是精度比较高,但是缺点是对相机的角度和环境的光线要求非常高。
5、(2)基于卷积神经网络的定位,优点是对光线要求不高,可以适应各种环境,缺点是需要消耗大量的算力,常用的卷积神经网络有:fasterr-cnn、r-fcn、ssd和yolo。由于yolo的网络结构最简单,目前移动端主要使用yolov5。
6、其中,基于卷积神经网络的定位方法中,虽然yolov5网络结构简单,但其算力消耗仍然较大,因此,对移动端而言,依然无法完全保证视频的实时识别。
7、因此,有必要提供一种目标定位方法、装置、移动终端及存储介质来解决上述技术问题。
技术实现思路
1、有鉴于此,有必要提供一种目标定位方法、装置、移动终端及存储介质,以解决现有技术中基于卷积神经网络的定位方法,算力消耗较大的技术问题,进而提升移动端目标定位的实时性。
2、为实现上述目的,本发明一实施例提供了一种目标定位方法,包括以下步骤:
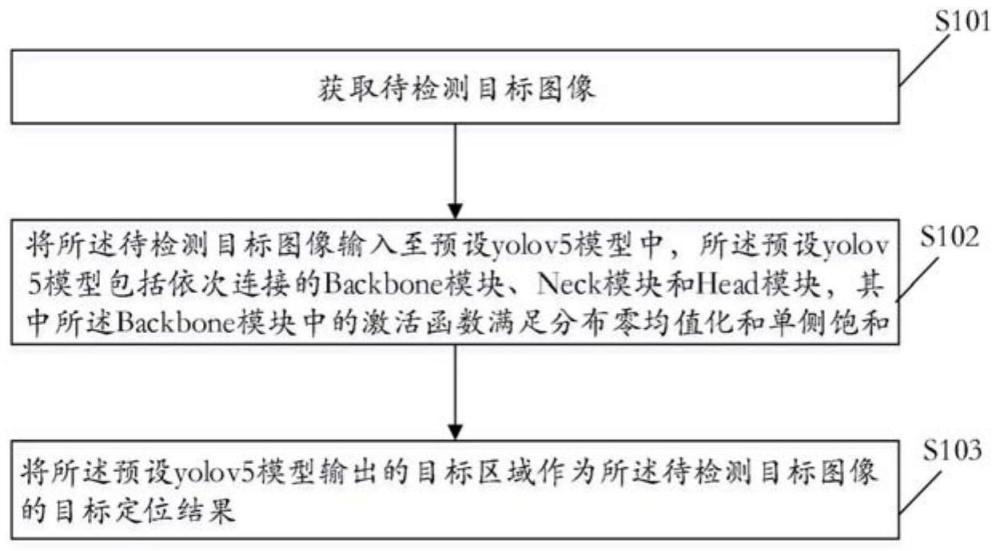
3、获取待检测目标图像;
4、将所述待检测目标图像输入至预设yolov5模型中,所述预设yolov5模型包括依次连接的backbone模块、neck模块和head模块,其中所述backbone模块中的激活函数满足分布零均值化和单侧饱和;
5、将所述预设yolov5模型输出的目标区域作为所述待检测目标图像的目标定位结果。
6、可选的,所述激活函数为:
7、
8、所述x表示所述激活函数的输入数据,所述f(x)表示所述激活函数的输出数据。
9、可选的,所述backbone模块包括依次连接的steam块、cbs块以及spp块;
10、所述steam块包括四个cbs块、一个最大值池化层以及一个contat连接层,用于对所述待检测目标图像进行下采样;
11、所述cbs块包括一个卷积层、一个归一化层和一个所述激活函数,用于对所述待检测目标图像进行卷积层特征提取;
12、所述spp块用于提取固定大小的特征向量,并送入所述neck模块。
13、可选的,所述spp块由窗口大小分别为3、5、7的三个最大池化层拼接形成。
14、可选的,所述目标定位方法还包括:
15、获取样本图像集,所述样本图像集中包括含有待检测目标的多张原始图像;
16、对每张所述原始图像进行目标区域标记,将标记后的原始图像作为训练图像,得到由多张训练图像构成的训练图像集;
17、将所述训练图像集作为训练数据集,将所述样本图像集作为测试数据集,对yolov5模型进行训练,得到所述预设yolov5模型。
18、可选的,当所述待检测目标为车牌号时,对每张所述原始图像进行目标区域标记包括:
19、对所述原始图像中目标区域的省份区域进行标记得到第一训练图像;
20、对所述原始图像中目标区域的车牌号区域进行标记得到第二训练图像;
21、将所述第一训练图像和所述第二训练图像作为训练图像。
22、可选的,对每张所述原始图像进行目标区域标记具体为:
23、对每张所述原始图像的目标区域进行遮挡,得到训练图像。
24、本发明另一实施例提供了一种目标定位装置,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的目标定位方法的步骤。
25、本发明另一实施例提供了一种移动终端,包括如上所述的目标定位装置。
26、本发明又一实施例提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如上所述的目标定位方法的步骤。
27、与现有技术相比,本发明实施例的目标定位方法,通过对yolov5模型中的激活函数进行优化设计,将激活函数设计为满足分布零均值化和单侧饱和,可以加快训练速度和更快的收敛,能够大大减小算法平均耗时,减小目标定位过程中的算力消耗,进而提高移动终端的定位实时性。
技术特征:
1.一种目标定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的目标定位方法,其特征在于,所述激活函数为:
3.根据权利要求1所述的目标定位方法,其特征在于,所述backbone模块包括依次连接的steam块、cbs块以及spp块;
4.根据权利要求3所述的目标定位方法,其特征在于,所述spp块由窗口大小分别为3、5、7的三个最大池化层拼接形成。
5.根据权利要求1所述的目标定位方法,其特征在于,所述目标定位方法还包括:
6.根据权利要求5所述的目标定位方法,其特征在于,当所述待检测目标为车牌号时,对每张所述原始图像进行目标区域标记包括:
7.根据权利要求5所述的目标定位方法,其特征在于,对每张所述原始图像进行目标区域标记具体为:
8.一种目标定位装置,其特征在于,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上的权利要求1至7中任一项所述的目标定位方法的步骤。
9.一种移动终端,其特征在于,包括权利要求8所述的目标定位装置。
10.一种计算机可读存储介质,其特征在于,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如权利要求1至7中任一项所述的目标定位方法的步骤。
技术总结
本发明公开了一种目标定位方法、装置、移动终端及存储介质,该方法包括以下步骤:获取待检测目标图像;将所述待检测目标图像输入至预设yolov5模型中,所述预设yolov5模型包括依次连接的Backbone模块、Neck模块和Head模块,其中所述Backbone模块中的激活函数满足分布零均值化和单侧饱和;将所述预设yolov5模型输出的目标区域作为所述待检测目标图像的目标定位结果。与现有技术相比,本发明实施例的目标定位方法,通过对yolov5模型中的激活函数进行优化设计,将激活函数设计为满足分布零均值化和单侧饱和,可以加快训练速度和更快的收敛,能够大大减小算法平均耗时,减小目标定位过程中的算力消耗,进而提高移动终端的定位实时性。
技术研发人员:冉威
受保护的技术使用者:深圳联友科技有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!